基于飞秒激光的可运动微结构加工与旋转驱动
2020-04-11 02:00袁宏伟饶生龙李家文胡衍雷
光学精密工程 2020年3期
袁宏伟,饶生龙,吴 东,李家文,胡衍雷
(中国科学技术大学 精密机械与精密仪器系,安徽 合肥 230027)
1 引 言
近年来,微纳米技术发展迅速,多种微纳加工技术、微纳结构的制造得到了研究者的广泛关注,并且取得了长足的进步。其中,可驱动微结构在微纳领域具有举足轻重的地位,这些微结构可以应用在微流控技术[1]、智能传感[2]、生物医药[3]和热力学[4]等方面。可旋转微结构作为一种物理模型简单、驱动方式灵活、制造方法多样的模型,已经成为一个研究热点。2010年,Xia等通过在光刻胶中掺杂四氧化三铁磁性纳米颗粒,利用飞秒激光双光子聚合技术,实现了微型旋转磁控推动器件的加工[5]。2014年,Balk等研究者利用超声波驱动纳米马达实现了旋转推进[6]。2018年,Shao等实现了对等离子体纳米马达的光驱旋转运动控制[7]。
微转子结构的加工制造可以通过多种方法实现,如激光双光子聚合技术[8]、化学合成法[9]和UV刻蚀法[10-12]等。由于飞秒激光双光聚合具有加工精度高、可控性好、可实现真三维结构加工等优势,被广泛地应用于微纳米器件的加工[13-16]。而微结构的驱动方式也具有多样性,如磁驱动[17]、光驱动[18]和超声驱动[6]等。其中,光驱动的方式具有非接触性、对被驱动的对象损害小等优点,而且光控制的系统易于集成,在实验系统中应用方便。然而,到目前为止,可运动微结构的加工和驱动都是独立进行的,即微转子的加工和驱动需要两套截然不同的系统来完成,这增加了加工成本和系统复杂度,不利于微驱动和微加工的高效率集成化。
本文提出了一种利用飞秒激光系统同时实现微转子加工和驱动的方法。飞秒激光双光子聚合技术可以制造出不同形态的微转子结构;空间光调制器(Spatial Light Modulator,SLM)可以灵活调制出不同拓扑荷的涡旋光场;带有轨道角动量的光场可以驱动微转子结构顺、逆时针以不同的速度旋转。SLM通过动态加载全息图,可以灵活控制光场的参数,以实现微转子的多种运动模式。这种微转子结构可以集成在芯片实验室中,多模式的光驱旋转运动在微流控技术、生物智能传感、精密测量等领域具有广泛的应用前景。
2 加工系统与原理
2.1 飞秒激光加工系统与光学调制系统
飞秒激光直写技术经过近二十年来的发展,已经日臻成熟。将飞秒激光经过物镜聚焦至透明材料内部,使得飞秒脉冲与材料相互作用而发生物理化学性质的改变。该方法加工精度高、控制灵活、适用于加工制造复杂的三维结构。图1(a)所示为飞秒激光直写加工聚焦示意图。入射激光通过物镜聚焦至材料内部,实现三维加工的方式有两种:第一种是通过控制高精度三轴移动台,保持入射光的位置不变,实现样品的三维加工;第二种是使用高速扫描振镜,对入射光进行微小的偏转,实现在二维方向上的运动,结合单轴位移台,实现三维空间中的加工。本实验采用第二种方法实现目标结构的加工。
涡旋光是一种带有轨道角动量的光场,与置于光场中的物体作用会产生相应的力学特性[19]。硅基液晶空间光调制器(Liquid Crystal on Silicon Spatial Light Modulator, LCoS SLM)是一种纯相位型调制器,它可以对入射激光的波前相位进行调制,结合傅里叶变换全息理论,可以实现数值和解析光场的调制[20-21]。如图1(b)所示,入射激光通过反射式LCoS SLM,其波前相位被调制;经Lens1和Lens2组成的4f系统,对光束进行缩放和滤波;再经物镜聚焦,在物镜后焦面实现与加载相位对应的光场分布。

(a)飞秒激光加工系统聚焦示意图(a)Illustration of focus processing of femtosecond laser processing system(b)飞秒激光相位调制系统示意图(b)Schematic diagram of femtosecond laser phase modulation system图1 飞秒激光加工系统Fig.1 Femtosecond laser processing system
2.2 涡旋光场的计算与仿真
涡旋光可以通过螺旋相位板产生。本文通过LCoS SLM加载螺旋相位因子全息图,可以便捷、灵活地调制出不同的涡旋光束。入射波前的相位分布函数及其相位全息图分布分别为:
Φl(θ)=exp(lθ),
(1)
Gl(θ)=255·mod(Φl(θ),2π)/2π,
(2)
式中:l是拓扑荷,θ是相位分布函数的极坐标角度变量。由于LCoS SLM的调制方式需要加载8位灰度图像,故这里通过式(2)将0~2π的相位转化成对应的灰度分布。图2(a)和2(b)分别是拓扑荷为+10和-10的涡旋相位分布灰度全息图。
利用Debye衍射理论[22],可以得到物镜后的光场强度分布,其表达式为:

(3)
式中:C是常数,λ是入射波长,n0是浸入介质的折射率,α是物镜的最大孔径角。P(θ,φ)是和入射光的偏振状态相关的矢量,其表达式为:
P(θ,φ)=[1+(cosθ-1)cos2φ]i+
[(cosθ-1)cosφsinφ]j+[sinθcosφ]k.
(4)
由此可以计算仿真出三维空间光场的强度分布。如图2(c)所示,使用拓扑荷为+10的全息相位图加载至LCoS SLM上,物镜后焦面上得到的光场强度分布特征为含有光学轨道角动量的环状分布。图2(d)是在物镜后面沿光轴方向的光场强度分布。由图可知,仅在焦平面上光强达到最大,离焦后光强迅速降低,这种光强分布特征有利于转子结构的驱动。实际调制过程中,LCoS SLM会产生多个级次的衍射光,为了达到最好的调制效果,需要在涡旋相位全息图上叠加闪耀光栅全息图,将0级衍射光偏移。

(a)+10的涡旋相位全息图(a)Phase holograms with topological charges of +10(b)-10的涡旋相位全息图(b)Phase holograms with topological charges of -10(c)聚焦涡旋光在焦平面的光强分布仿真图(c)Simulation diagram of light intensity distribution of focused vortex beam in focal plane(d)聚焦涡旋光在传播方向的光强分布(d)Light intensity distribution of focused vortex beam in propagation direction图2 涡旋相位全息图及涡旋光的光强分布Fig.2 Phase holograms and light intensity distribution of vortex beam
3 实验与结果
3.1 微转子加工
图3(a)所示为四叶轮微转子结构的三维示意图。采用图1(a)所示的飞秒激光直写加工系统实现微转子结构的加工。加工实验所用激光的中心波长为800 nm,脉冲重复频率为80 MHz,飞秒脉冲的宽度为75 fs。实验前将SZ2080(Greece, IESL FORTH)光刻胶旋涂至盖玻片表面,在100 ℃条件下保持1 h,以除去光刻胶中的水分。激光功率选择5 mW,通过油镜(NA1.35,60×)将光斑聚焦至光刻胶内部,使得光刻胶发生双光子聚合反应。加工完成之后,将样品置于正丙醇溶液中2 h进行显影处理,以除去未发生聚合反应的光刻胶。图3(b)~3(e)是含有不同叶轮数、不同扇叶尺寸的微转子结构的扫描电子显微镜图。由电镜图可知,显影后的转子结构与设计的形貌基本一致,微转子的质量较好。通过修改加工程序,可以灵活地调整微转子的尺寸、叶轮数等参数。
图4所示为显影完成的微转子阵列结构在乙醇溶液中的光学显微镜图。在显微镜下可以明显观察到微转子的叶轮部分与固定轴分离,外界液体环境的扰动可以使活叶轮转动。这种微转子的加工效率高,结构的一致性与重复性好。

(a)四叶轮微转子结构三维示意图(a)Three-dimensional schematic diagram of a four-vane microrotor structure

图3 微转子结构的扫描电镜图
Fig.3 Scanning Electron Microscope(SEM) images of microrotors

(a)四叶轮微转子结构的光学显微镜图(a)Optical micrographs of the four-vane microrotor structures with vane length of 7.5 μm(b)六叶轮微转子结构在乙醇溶液中的光学显微镜图(b)Optical micrographs of the six-vane microrotor structures with vane length of 7.5 μm

(c)四叶轮微转子结构在乙醇溶液中的光学显微镜图(c)Optical micrographs of the four-vane microrotor structures with vane length of 10 μm(d)六叶轮微转子结构的光学显微镜图(d)Optical micrographs of the six-vane microrotor structures with vane length of 10 μm图4 微转子阵列结构在乙醇溶液中的光学显微镜图Fig.4 Optical micrographs of microrotors in ethanol solution
3.2 微转子驱动
涡旋光具有轨道角动量,可以用来驱动微球及微结构[23-25]。如图5(a)所示,通过LCoS SLM加载全息图,物镜下可以调制出环形涡旋光场,环形区域作用于转子叶轮部分,将光学轨道角动量传递至叶轮,可以驱动其旋转。携带轨道角动量的光束具有螺旋性的波前形状。当光束作用于结构时,相当于以一定的螺旋倾斜角度入射到结构表面,光在材料界面发生吸收和散射,从而将光子的动量转移到了结构上,实现了结构的旋转驱动。实验中,将转子结构放置于乙醇溶液环境中,使用拓扑荷为+10与-10的全息图产生涡旋光,图1(b)中4f系统的透镜焦距比例为Lens1∶Lens2=2∶1,聚焦物镜的数值孔径为0.8,倍数为50×。通过显微镜的三维位移台,可以调整聚焦光斑与转子的相对位置。
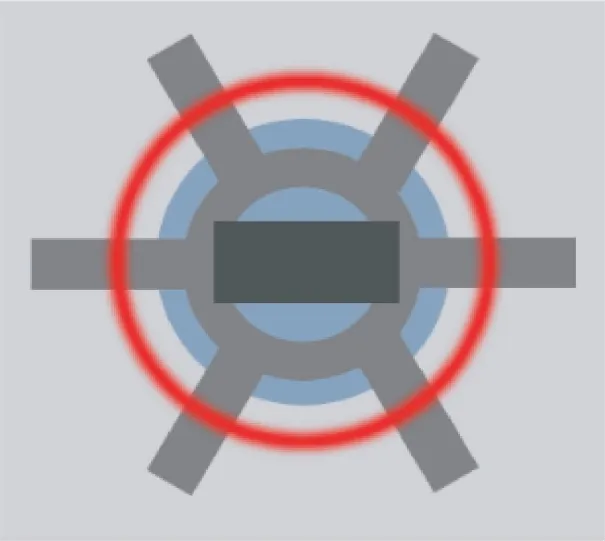
(a)微转子结构的光驱旋转原理示意图(a)Light-driven rotation schematic of microrotor structure(b)微转子的顺时针旋转示意图(b)Optical image of clockwise rotation of the rotor(c)微转子的逆时针旋转示意图(c)Optical image of counterclockwise rotation of the rotor图5 微转子光驱动Fig.5 Light-driven rotation of microrotor
用于旋转驱动的光源与加工所用的飞秒激光相同,入射功率为300 mW。采用拓扑荷正负性不同的全息图时,转子的旋转方向不同。图5(b)和5(c)所示分别为转子在溶液中的旋转图,采用的全息图拓扑荷分别为+10和-10,图中箭头指向为转子旋转的方向,实验测得转子的转速为40 r/s。值得注意的是,由于实验中利用的是毫瓦量级的激光进行驱动,能量较低,获得的转速较慢;另外,由于转子由光学轨道角动量驱动,且该动量沿涡旋光场切线方向,外界环境的扰动容易导致微转子叶轮偏移涡旋光的中心,从而影响驱动效果。通过实验还可以看到,在物镜焦平面生成的光漩涡直径比理论计算值(见图2(c))稍大。这是因为通过4f系统后光束直径未完全覆盖物镜入瞳孔径,造成物镜的实际数值孔径偏小而导致的。
实验表明,只需要动态切换全息图的拓扑荷就可以改变微转子的旋转状态。通过改变入射激光的功率、微转子结构的尺寸,能够灵活地实现不同的旋转速度。
4 结 论
本文提出了一种利用飞秒激光同时进行微转子加工和驱动的方法。利用飞秒激光直写技术,通过双光子聚合加工,可以灵活地加工出结构复杂、质量高、一致性好的三维微转子结构;通过计算全息技术,利用LCoS SLM加载全息图,可以调制出具有不同光学轨道角动量的涡旋光场。将涡旋光场作用于微转子结构,可以实现转子不同模式的运动。这种微转子结构可以集成在微流控芯片中,结合光驱动的方式,可以用于微流量控制和传感,在微流控系统、智能传感和药物运输等领域具有广阔的应用前景。
猜你喜欢
电子与信息学报(2022年5期)2022-05-31
人人健康(2021年16期)2021-12-01
科学(2020年5期)2020-01-05
制造技术与机床(2019年8期)2019-09-03
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
数字通信世界(2019年3期)2019-04-19
系统工程与电子技术(2016年2期)2016-04-16
中国光学(2016年1期)2016-02-26
发明与创新·中学生(2015年9期)2015-09-05
浙江大学学报(工学版)(2015年1期)2015-03-01