基于神经网络的真空断路器状态诊断
2020-04-18 06:17庞吉年王洪寅周福举徐琛苑
科学技术创新 2020年6期
庞吉年 王洪寅 周福举 花 俊 徐琛苑
(1、国网江苏省电力有限公司宿迁供电分公司,江苏 宿迁223800 2、南京宁汇智能科技有限公司,江苏 南京210039 3、南京理工大学,江苏 南京210094)
真空断路器作为电力系统的开关以及保护设备,具有体积小、噪声低、可靠性高等优点。在电力系统发生局部故障时,一旦发生由于断路器故障而导致不能及时隔离局部故障,极有可能扩大停电范围,造成严重的经济损失。根据资料显示,由断路器控制回路和操动机构等方面的问题引起的机械故障,占全部故障的70%~80%[1]。所以,根据机械振动信号来判断断路器的机械故障,对于断路器的状态检修具有重大的意义。
目前针对断路器的故障诊断研究工作在国内外相继展开,尤其是神经网络越来越多被应用到高压断路器的故障诊断当中。例如深度神经网络(DNN)[2]、BP 神经网络[3]、径向基函数网络(RBF)[4]、自组织映射网络(SOM)[5]等。而DNN 每次输入都要对所有权值进行修正,全局用它可能无法满足实时性要求[6];BP 神经网络用于全局可能影响收敛速度,以及易陷于局部极小值[7];RBF 不能完全地识别出故障类型[8];SOM采用无监督学习规则,缺乏分类信息[9]。所以针对上述问题进行进一步的研究,提出了一种深度神经网络与BP 神经网络相结合的方案,能够更准确可靠地对高压断路器的各类常见故障进行诊断。
首先通过小波包变换对采集到的断路器振动信号进行处理,并引入能量熵的概念,利用小波包系数获得信号在各个频带的能量分布,获得每一种状态下振动信号的特征向量[10]。然后通过获得的特征向量训练深度神经网络,对故障状态与正常状态进行一次分类。再充分利用BP 神经网络的非线性映射拟合的优势,利用故障状态的特征向量训练BP 网络,并把诊断过程获得的新的特征向量当作已经学习过的BP 网络的输入,这样BP 网络会根据学习后所保存的非线性关系,将输入BP 神经网络的特征向量进行区分,最终输出其所对应的真空断路器状态。
1 训练样本的构造
断路器操动机构在断路器进行开合的过程中起着十分重要的作用,许多断路器的机械故障都与操动机构部分有关[11]。研究的真空断路器采用弹簧作为动力的操动机构,其结构简化模型如图1 所示。
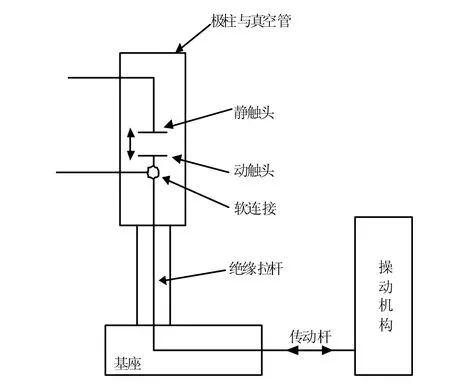
图1 断路器的结构简化模型图
1.1 振动信号采集
断路器在分合闸的操作过程中,其操动机构伴随着一系列的冲击过程,通过在断路器上安装加速度传感器可以采集到这个过程中产生的加速度波形信号。选择IEPE 加速度传感器的CA-YD-181 定制型,灵敏度为1mv/g,频响范围为5~10kHz,测量范围为5000g。具体的采集流程如图2 所示。
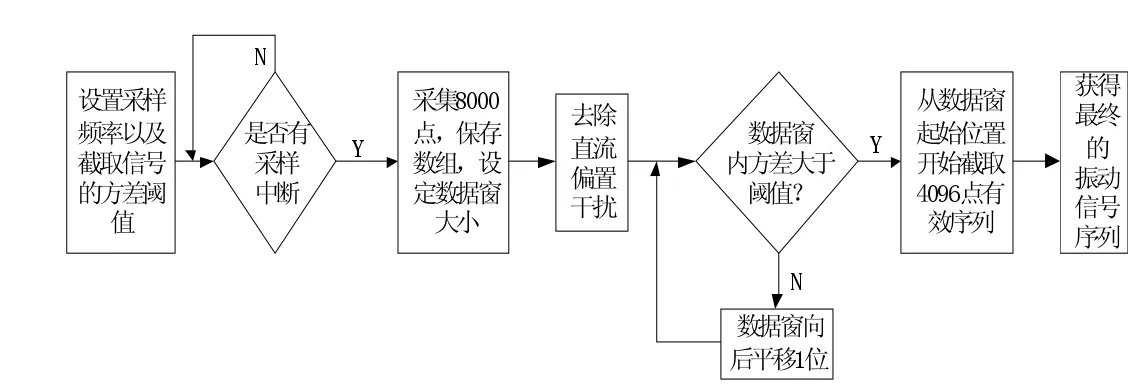
图2 振动信号采集流程图
1.2 振动信号处理
1.2.1 小波包变换
小波包变换技术是一种比小波变换更加精细的时频分析方法,它能较好地表达振动信号的局部特征[12]。因此,采用小波包变换技术来提取采集到的真空断路器振动信号的特征向量[13]。考虑到小波包的尺度数,直接选用了db4 小波。图3 为选用Matlab 小波工具箱中的db4 小波对采集到的振动信号进行4 层分解后得到的示意图。
1.2.2 利用能量熵获取特征向量
真空断路器产生的振动信号,在故障状态相对于正常状态的变化会反应到频带内信号的能量上,所以通过分析各频率信号的能量变化可以发现一些故障信息[14]。信息熵能够度量数据的复杂度,因而常被用来对小波包分解后的数据序列进行量化表达[15]。为了反应断路器的机械状态,将能量熵作为特征向量,并且建立以其为元素的样本空间。
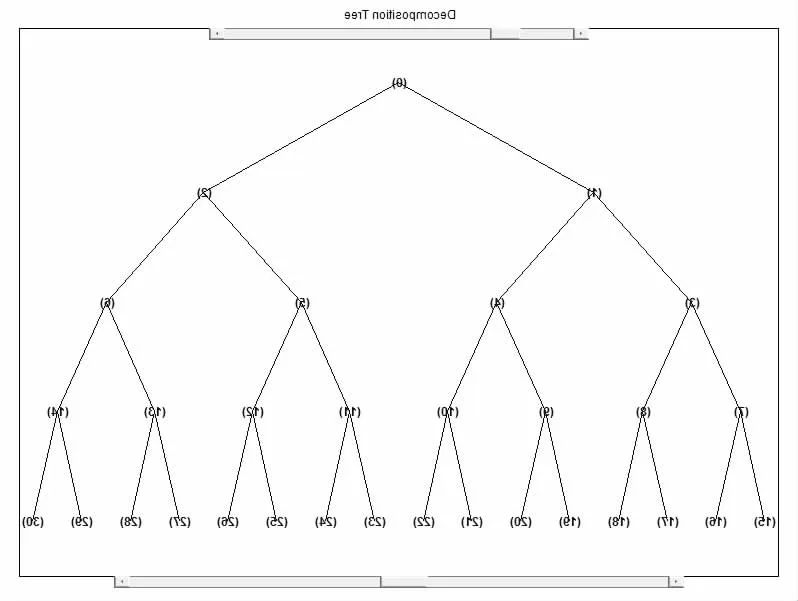
图3 4 层分解示意图
2 深度神经网络故障识别
2.1 DNN 原理与基本结构
深度神经网络(Deep Neural Networks, DNN)可以理解为有很多隐藏层的神经网络,又被称为深度前馈网络(DFN),多层感知机(Multi-Layer perceptron, MLP)。基本的DNN 结构图如图4所示:

图4 DNN 基本结构图
按照不同层位置的划分,DNN 内部的神经网络层可以分为:输入层、隐藏层和输出层。
2.2 深度神经网络模型搭建
要利用深度神经网络(DNN)模型对正常状态与故障状态进行一次分类,计算步骤如下:
(1)定义网络结构;
(2)初始化模型参数;
(3)循环计算:前向传播/计算当前损失/反向传播/权值更新。
3 BP 神经网络故障类型诊断
3.1 BP 神经网络结构与工作原理
BP 神经网络又被称为误差反向传播神经网络[16]。如图6 为一个标准的BP 网络结构示意图,其中包含了输入层、隐含层以及输出层。
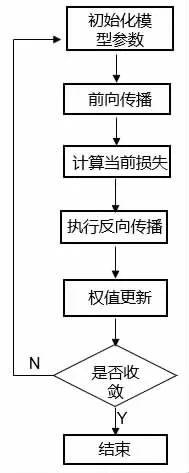
图5 计算流程图
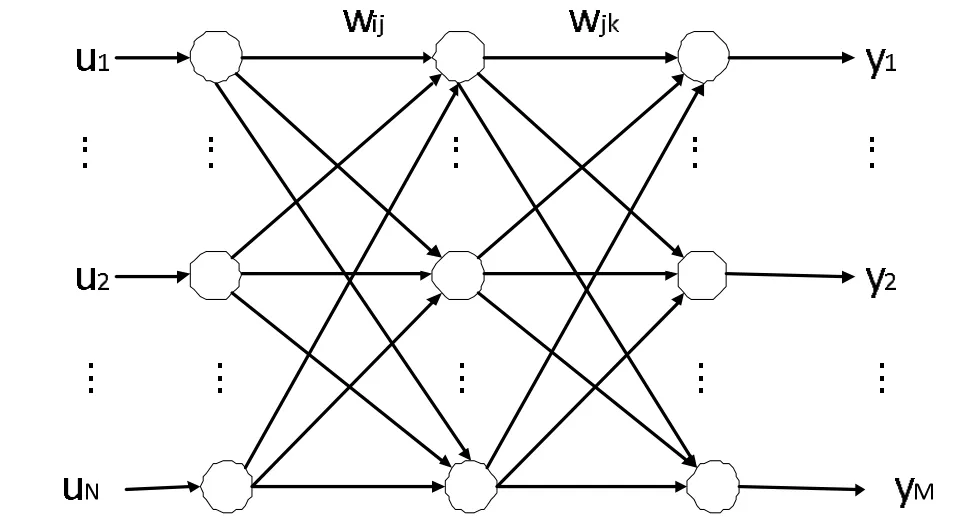
图6 BP 神经网络结构示意图
3.2 算法实现
具体实现过程如下:
(1)输入N 个学习样本(Xk,Yk*),k=1,2,…,N;(2)构建BP 神经网络结构;
(3)设置误差限定值ε,最大迭代数Tmax,学习率η 以及冲量系数β,最开始的迭代次数t=1,训练数据序列k=1;
(4)取第k 个学习样本;
(5)由Xk进行信号正向传播计算,依次计算每一个网络层各个节点的输入与输出;
(6)算出BP 网络输出层各节点的误差;
(7)如果对N 个训练数据的任一数据序列K 值使得Ejk≤ε,j=1,2,…,m 或者t>Tmax,则训练结束;
不满足则将误差按网络进行反向传播,通过这样来对权值矩阵做修改;
(8)误差反向传播计算;
(9)k=k+1,t=t+1 跳转步骤(4)。
4 MATLAB 软件仿真与结果分析
4.1 采用深度神经网络与BP 网络结合的诊断方法的MATLAB 软件仿真
选取断路器各种状态下的180 组特征相量,其中120 组用于训练,其余60 组用于测试。对应的目标向量为一个二元向量,元素分别取值0 或者1,分别表示断路器的两种状态,对应关系如表1。

表1 真空断路器的状态与目标向量对应关系
经过深度神经网络训练与测试以后,最终错误率在20%以内,满足要求。
再选取经过深度神经网络一次分类以后的故障状态下的150 组特征向量,其中100 组用于训练,50 组用于测试。对应的目标向量为一个五元向量,元素分别取值0 或者1,分别表示断路器的5 种状态,对应关系如表2。

表2 真空断路器的状态与目标向量对应关系
现取每种状态下30 组特征向量的前20 组,共计100 组特征向量用于神经网络的学习训练。再利用训练过的BP 神经网络,对输入数据进行模式识别,选取每种状态下30 组特征向量的后10 组,共计50 组进行验证。结果如图7 所示,最终正确率为92.0%。

图7 BP 神经网络结果验证图
4.2 只采用BP 网络诊断的MATLAB 软件仿真
选取断路器各个状况下总计180 组数据,其中120 组用于用于测试。对应的目标向量为一个六元向量,元素分别取值0或者1,分别表示断路器的6 种状态,对应关系如表3。
同样构建BP 神经网络,并取每种状态下30 组特征向量的前20 组,共计120 组特征向量用于神经网络的学习训练。再利用训练过的BP 神经网络,对输入数据进行模式识别,选取每种状态下30 组特征向量的后10 组,共计60 组进行验证,得到的结果如混淆矩阵图8,可以看到正确率为90.0%。

表3 真空断路器的状态与目标向量对应关系
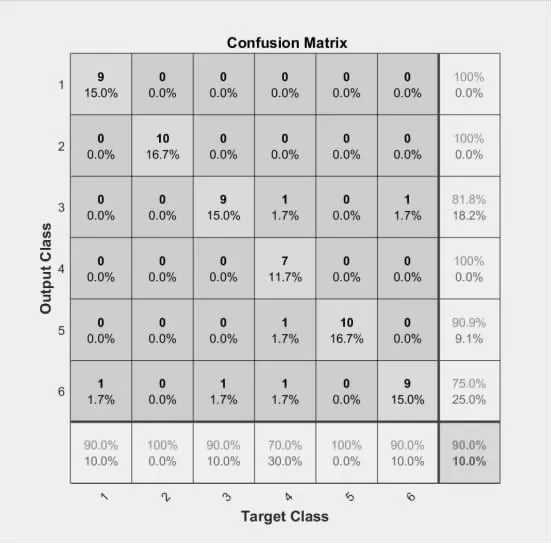
图8 BP 神经网络结果验证图
4.3 结果对比与分析
对比两种方案的实验结果,采用深度神经网络进行一次分类的正确率达到了92%,高于直接使用BP 的90%。并且迭代次数只用BP 为200 次,多于深度神经网络与BP 结合的次数61次,说明直接使用BP 的学习速率较慢。
直接使用BP 神经网络可能存在以下问题:
(1)BP 算法为一种局部搜索的优化方法,因此算法很有可能陷入局部极值。
(2)从问题中选取典型样本实例组成训练集是一个相对困难的问题。
(3)难以解决应用问题的实例规模和网络规模间的矛盾。
(4)网络结构的选择尚无一种统一而完整的理论指导,一般只能由经验选定。
所以通过使用深度神经网络与BP 神经网络相结合的诊断方法可以弥补直接使用BP 进行识别存在的不足,达到更好的诊断效果。
5 结论
提出了一种深度神经网络与BP 神经网络相结合的真空断路器故障诊断方法。通过加速度传感器采集断路器振动信号,采用小波包- 能量熵从振动信号中提取特征向量,再用特征相量训练深度神经网络对正常状态与故障状态一次分类,最后用BP 神经网络对具体故障类型分类得出诊断结果。
结合具体算例进行了验证,直接用BP 神经网络对断路器状态进行诊断的正确率为90%,迭代次数为200 次;先用深度神经网络一次分类再用BP 具体分类的正确率达到了92%,BP神经网络迭代次数61 次。结果表明采用深度神经网络与BP 神经网络结合诊断的方法能够更加快速准确地得到诊断结果。
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
保定学院学报(2022年2期)2022-04-07
成都信息工程大学学报(2021年1期)2021-07-22
计算机测量与控制(2020年12期)2021-01-07
热力发电(2019年5期)2019-06-06
数学学习与研究(2018年15期)2018-11-12
电子制作(2018年14期)2018-08-21
电子制作(2018年10期)2018-08-04
电子制作(2017年8期)2017-06-05
电子制作(2017年20期)2017-04-26