
5_DOF取皿机械臂设计与虚拟样机仿真
2020-04-22 06:51易盼赵立宏
机械制造与自动化 2020年1期
易盼,赵立宏
(南华大学 机械工程学院,湖南 衡阳 421001)
0 引言
随着我国经济实力和生产能力不断提升,我国医药制造业的收入和利润同样有着较大的提升空间。在生物品制造过程中,微生物菌种的培养具有成熟时间不确定、劳动强度大、重复度高等特点。这成为微生物培养生产链中最费时、费力的环节。为节约生产成本,提高生产效率,提议用抓取机械臂代替人工取放皿,达到提高微生物培养工作效率的目的,实现微生物培养过程的自动化。
针对上述问题,进行了微生物培养皿抓取机械臂各部分结构设计,并通过UG软件建立抓取机械臂三维模型图,利用MATLAB和ADAMS进行运动学和动力学仿真,根据仿真结果进行运动和动力分析,为后期机械臂电机选型及样机制造提供理论依据。
1 取皿机械臂的结构设计
以皿托盘的培养皿存储架中竖直码垛好的微生物培养皿为抓取对象,皿托盘中正方形排列4个培养皿存储架。皿托盘中离机械臂底座较远的2个培养皿架各放有12个皿。离机械臂底座较近的2个皿架为空,每个培养皿高14mm。初始时,机械臂末端执行器位于皿托盘中心,机械臂底部固定,其底部中心与皿托盘水平距离为130mm。根据以上要求确定机械臂的纵向深度为175mm,则机械臂需要达到的工作空间为165mm×64mm×175mm。
考虑到串联式机器人末端执行器的误差是各关节误差的积累和放大,而对安装在机械臂各关节上的电机增加了转动惯量,导致机械臂笨重、刚度低、动态性能不理想[1]。因此,本文在关节型码垛机器人的基础上,保留了用于保证末端执行器在机械臂运动过程中始终保持水平的平行四边形结构,运用多自由度多连杆机构理论知识,将此机械臂的驱动电机安装在腰部旋转架上,减少机械臂关节铰接处的转动惯量,提升机械臂整体刚度和稳定性能。考虑到机械臂抓取物的形态及尺寸,在机械臂末端设计了连杆抓手机构,其零件编码表以及三维模型图分别如表1和图1所示。
图1为本文设计的五自由度的关节型机械臂结构图。该机械臂主要由固定底座、腰关节、肩关节、肘关节、腕关节和末端执行器6部分组成。其工作原理为:旋转机架通过电机与下方固定底座连接,大臂通过肩部电机安装在旋转机架上,小臂中部与大臂末端铰接连接,小臂一端通过第二连杆和第二主动杆与旋转机架上的肘关节电机连接,小臂另一端通过平动保持架与末端执行器连接。

表1 取皿机械臂的零件编号

图1 取皿机械臂结构示意图
2 取皿机械臂的运动学分析
机械臂运动学研究的是各关节连杆空间位置与末端执行器在空间上的位置、姿态之间的关系,对机械臂作运动学研究可以为后期机械臂的轨迹规划提供理论基础。运动学分析有正运动学和逆运动学两个大类,正运动学为已知机械臂各连杆位置以及关节角矢量,求解末端执行器相对于基座的位置和姿态;逆运动学则为已知末端执行器的位置和姿态,求解满足运动到指定位置和姿态的各连杆位置关系及其关节角矢量。
2.1 机械臂连杆坐标系
本文中取皿机械臂整体有5个自由度,末端工作空间是其机械手的工作范围,与前3个自由度有关,因此在研究其运动轨迹时,采用去除其机械手爪的方式作分析。为了完成该机械臂数学模型的建立,采用D-H表示法来对机械臂各关节建立参考坐标系,如图2所示。
机械臂D-H坐标系通过ai、αi和di、θi4个参数来描述。ai为两连杆轴线之间的最短距离;αi为两轴线垂直于ai所在平面内的夹角;di为两个相邻连杆沿公共轴线方向的距离;θi为两相邻连杆绕公共轴线旋转的夹角。

图2 机械臂D-H坐标系
2.2 取皿机械臂各关节参数的确定
1) 各关节转角范围的确定。腰关节作用是使机械臂实现回转运动来达到抓取要求,理论上可以达到±180°,实际作业中只需要±20°。然而考虑到其安装与维护,故取转角范围为±90°。由于抓取培养皿属于空中作业,故肩关节转角范围取为70°~110°。考虑到抓取皿的深度,取肘关节转角范围70°~160°就可以达到作业要求。由皿托盘和皿架的摆放和定位可知机械臂腕关节的旋转角度范围为±90°。
2) 各个连杆长度尺寸确定。考虑机械臂的作业空间、机械臂的安装位置,结合机械臂与皿托盘之间的确定距离,初步取a1=13.5mm,a2=200mm,a3=148mm,d2=-4.5mm。通过数值法对该机械臂进行工作空间验证,看其是否满足抓取皿操作要求。
2.3 取皿机械臂运动学分析

(1)
(2)

(3)
其中:si=sinθi,ci=cosθi,sij=sin(θi+θj),cij=cos(θi+θj)。
由以上分析可知式(3)即为取皿机械臂末端执行装置的齐次变换矩阵即末端位置正解表示。
2.4 取皿机械臂逆运动学分析
对机械臂的逆运动学求解,考虑依次将位姿矩阵的逆矩阵左乘机械臂的运动学方程,目的是使矩阵的左右两边只包含1个或者2个待求关节角角度变量,通过对应位置相等来求出各关节角度变量。

(4)

(5)
展开得
(6)
由上式左右两边相等,可得
c1py-s1px=d2
(7)

(8)
同理,可以求出
(9)
(10)
因为该取皿机械臂采用多组平行四边形结构,以保证安装在平动保持架上的末端执行装置在机械臂运动过程中始终处于水平状态,而θ4为横杆与平动保持架法向的转角,所以θ4所处关节参数变化不对末端执行装置的轨迹变化产生影响。
所以,式(8)-式(10)为机械臂运动学逆解表示。
2.5 机械臂工作空间验证
求解机械臂工作空间的方法主要有图解法、解析法以及数值法。数值法又包括搜索法、迭代法和蒙特卡洛法。本文采用蒙特卡洛法来求解机械臂的工作空间。在MATLAB中首先建立机械臂模型,然后编写程序来对取皿机械臂工作空间仿真[4]。样本点数越多,生成的工作空间越精确,边界越清晰,但是考虑到仿真速度等因素,取样本点数n=2000,得到机械臂工作空间三维点云图及其在xoy、xoz、yoz平面上的投影图如图3所示。




图3 机械臂工作空间点云图
由图3可知,机械臂工作空间近似为半个球体,且因工作范围约束,该半球体存在一个扇形缺口以及一个靠近z轴的空心区域,而此空心区域是由于机械尺寸的约束限制,其对于机械臂取放皿操作没有影响。该工作空间覆盖了机械臂所要求的任务空间,由此可知该取皿机械臂的D-H参数(表2)可以满足抓取皿操作要求。

表2 取皿机械臂D-H参数
3 取皿机械臂末端轨迹运动路径规划
根据取皿机械臂工作性质可知,整个工作循环过程中要求机械臂末端执行器与培养皿盘垂直,以确保培养皿能够顺利放入皿架中且皿底始终朝下。机械臂末端执行器运行轨迹应尽量接近直线。在UG软件二维图中采用去除机械手爪方式初步定出各关节角度参数,得出机械臂操作要求的规定轨迹在各个关键点处腰关节、肩关节、肘关节的角度值,如图4所示。在Adams仿真软件中做机械臂运动学仿真并进行各关节角度调整,跟踪并标记机械臂末端执行器位姿,将得到的数据点导出并导入MATLAB中作图[5],如图5所示。对比得知仿真轨迹图与期望轨迹重合度较高。

图4 关键轨迹点位置图
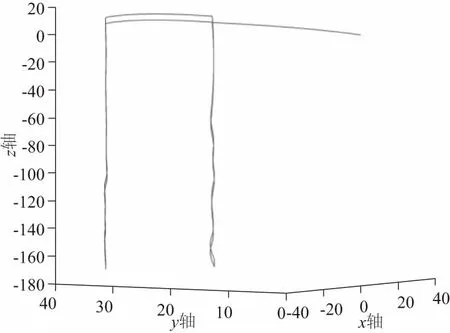
图5 取皿机械臂末端运行轨迹图
通过轨迹规划及作图仿真,得到在机械臂的一个工作循环中,其腰关节、肩关节、肘关节角位移与运行关键轨迹点的曲线关系,为Adams虚拟样机对机械臂取放皿仿真提供依据。表3为机械臂腰关节、肩关节、肘关节部分在机械臂运行关键轨迹点处所对应的角位移。

表3 腰关节、肩关节、肘关节在关键轨迹点处角位移
4 基于虚拟样机技术的机械臂运动仿真
4.1 样机的建立
为获得机械臂样机在取放培养皿过程中的受力及运动情况,借助Adams软件来对取皿机械臂进行运动学/动力学仿真。其步骤为:1) 首先通过UG软件进行取皿机械臂三维建模;2) 在UG软件中添加约束条件、驱动等;3) 将该模型导入到Adams仿真软件中;4) 在Adams软件中对机械臂进行工作环境、零件属性等设置;5) 进行运动学/动力学仿真分析。
4.2 正运动学仿真分析
在频繁地取放皿操作时,要求机械臂运行平稳,各个关节角位移、角速度和角加速度连续。机械臂工作循环过程有从初始位置开始,包含旋转、缓降、抓皿、缓升、旋转、缓降、放皿、缓升、复位几个阶段。结合表3中各关节轨迹点所对应的角位移,添加STEP驱动函数,进行取放培养皿的动力学仿真(图6)。通过仿真,得到机械臂在运动过程中的关键点图以及机械臂末端位姿输出的数据连续曲线图(图7)。

图6 机械臂取皿动力学仿真实验

图7 机械臂末端位移、末端速度随时间变化曲线图
4.3 逆运动学仿真分析
为验证取皿机械臂在工作空间能否实现按照固定运动轨迹输出,分析机械臂末端位姿输出与主动关节输入之间的关系,在Adams软件中跟踪末端执行器,得出其轨迹数据并导入MATLAB中作图如图5所示。该轨迹模拟取皿机械臂末端执行器从初始位置开始,首先水平运动至待取皿所在工位正上方,随后接近直线式缓慢垂直运动到待取皿所在工位上方附近位置,抓取培养皿,提升一定高度,水平移动到指定距离,再缓慢接近直线式下降至目标工位,完成培养皿分拣动作并复位的一个完整工作循环,循环周期时长为13.0s。
通过逆向运动学仿真可得,该取皿机械臂的角速度曲线如图8所示。可以看出腰关节、肩关节、肘关节的角速度运动参数在给定的机械臂运动位姿下满足工作要求,且变化连续,其肩关节角速度变化出现较多处升降变化,这是为满足机械臂末端抓手接近直线式垂直上下运动而造成的,因此其运动变化符合理论分析。另外,取皿机械臂各关节力矩变化曲线结果(图9)给该机械臂的工作性分析及其驱动电机选型等提供了参考依据。

图8 腰、肩、肘关节角速度变化

图9 腰、肩、肘关节力矩变化
5 结语
1) 基于抓取无干涉要求设计的关节型5自由度取皿机械臂,应用D-H法确定了满足取皿空间要求的各关节参数。
2) 应用UG软件和MATLAB/Robotics Toolbox获得机械臂末端走直线轨迹的各关节转角,结合Adams虚拟样机技术仿真了机械臂抓取、放置微生物培养皿的运动过程,获得了其抓取200 g培养皿时腰关节、肩关节及肘关节所需驱动力矩,可指导各关节驱动电机选型,为取皿机械臂的物理样机制造与取放培养皿实验提供参考依据。
猜你喜欢
考试与评价·高二版(2020年4期)2020-09-10
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年8期)2019-09-03
重型机械(2019年3期)2019-08-27
发明与创新·大科技(2019年2期)2019-06-26
制造技术与机床(2018年11期)2018-11-23
橡塑技术与装备(2018年14期)2018-07-20
制造技术与机床(2017年9期)2017-11-27
销售与市场(管理版)(2017年3期)2017-03-28
自动化学报(2016年8期)2016-04-16
