一种卫星双向时间同步系统故障定位方法
2020-04-23 13:38王茂磊王棋萍刘魁星
无线电工程 2020年5期
王茂磊,王棋萍,刘魁星
(1.中科院上海天文台,上海 200030;2.北京卫星导航中心,北京 100094)
0 引言
随着科学技术的发展,各类大型甚至巨型复杂电子信息系统的建设与应用层出不穷,其中一些系统出于精密测量与控制等需求(如卫星导航、国际时间比对等领域),要求系统之间实现高精度时间同步。高精度时间同步的前提是进行精密时间比对,时间比对的基本含义是通过某种方法或者手段获得2个时间参考点之间差值的过程。
时间比对的基本方法有多种,根据测量方式的不同,时间比对技术大致可划分为有线和无线两大类[1]。有线条件下的时间比对技术一般基于测量仪器进行时间间隔测量,主要应用于系统内部测量和时间同步。无线条件下的时间比对技术主要有GNSS共视时间比对、PPP精密时间比对和卫星双向时间比对等[2]。其中,卫星双向时间比对是公认精度最高的一种方法,具有测量精度与测站距离不相关、可同时进行测量数据交互等优点,在大型复杂、广域部署和工作实时性强的系统中得到了广泛应用[3]。
本文针对某卫星时间同步系统实际运行中出现的问题,从卫星双向时间比对的基本原理出发,分析了零基线条件下因观测链路的对称性进一步加强,卫星双向比对方程将退化为系统观测量、钟差和设备时延三者之间的关系。其中,系统观测量和钟差为已知量,因此可以准确测得设备组合时延,在3站条件下设备组合时延闭合差也将趋于零。通过各类不同测试场景对设备时延进行多次测量时,若某一站设备存在问题,将会出现无法闭合的情况,此时可通过分析3个组合时延变化情况直接定位故障站设备。以此为基础,开展了相关试验,验证了该方法的可行性。
1 卫星双向时间比对原理
卫星双向时间比对基于卫星双向时间频率传递 (Two-way Satellite Time and Frequency Transfer,TWSTFT)技术,基本原理是2个地面观测站分别通过卫星测量对方信号到达本地的时刻与本地时刻之间的时间偏差,再将各自得到的时间差相减,即可获得2个地面观测站的钟差[4],其原理如图1所示。
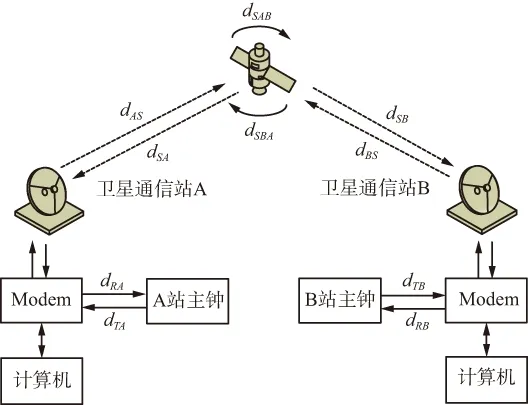
图1 卫星双向时间比对原理
由图1可以看出,Modem是专用于时间传输的调制解调器,可以将原子钟时间信号变换为适合卫星传输的伪随机码扩频信号,反之亦然。卫星双向时间同步系统可完成2站之间的双向比对,也可以在多站之间进行双向比对。
卫星双向时间比对的计算模型[1]为:
(1)
式中,TA,TB为两地Modem中计数器读数;dAS,dSA,dBS,dSB为两地对应的上、下行路径中的空间传播时延;dSAB,dSBA为两地对应的上、下行路径中卫星的转发器时延;dTA,dRB,dTB,dRA为两地的地面站设备时延;SAS,SSA,SBS,SSB为两地对应的上、下行路径中的Sagnac效应时延。
空间传播时延包括3部分:几何路径时延、电离层时延和对流层时延。
由地球自转引起的Sagnac效应时延,计算表达式为:
(2)
式中,ω为地球自转角速度;Ap为地面站、卫星和地心所构成的三角形在赤道面上的投影面积;c为光速。
在卫星双向时间比对过程中,由于信号传播路径的近似对称性,路径的影响原则上大部分被抵消,但由于站点布设空间几何分布、设备自身因素等原因,仍然有一部分非对称的因素影响了卫星双向时间比对的精度,主要包括:① 与卫星有关的误差,主要包含卫星运动引起的误差和卫星转发器不稳定的误差[5];② 信号传播路径上的误差,主要是由于信号上下行频率不同引起,包括对流层和电离层2个方面[6];③ 与地面站有关的误差,主要包括设备误差的影响7];④ 地球自转引起的Sagnac效应[8]。
2 某卫星双向时间同步系统故障问题描述
某站间时间同步系统建设过程中,基于某地球静止轨道卫星(GEO)在同一场区内建立了3站时间同步系统,如图2所示。

图2 某站间时间同步系统构成
该系统中,A,B,C站均布设在同一场区,相互距离不超过100 m,每个系统均配置原子钟的时频系统。3站时间可两两之间进行时间比对,因此可以测得3站之间的相互钟差分别为ΔTAB,ΔTAC,ΔTBC,理论上3站钟差的和(可称之为闭合差)应为0。
实际进行3站间的站间同步处理过程中,发现3站间的站间钟差闭合结果存在随机性跳变,即在某些时间段内可以闭合(闭合值接近于0),而在某些时间段内则不能闭合(闭合值在100 ns左右)。一些典型结果分别如图3和图4所示。

图3 3站站间时间同步闭合差正常结果

图4 三站站间时间同步设备闭合差异常结果
3 故障诊断原理分析与方案设计
3.1 故障诊断原理分析
为完成对该问题的诊断,从站间双向时间同步的基本原理出发,分析影响站间时间同步处理的主要因素,在此基础上对造成站间时间同步结果无法闭合的原因进行定位。
由于GEO卫星的轨道高度约为36 000 km,当任意2站之间的距离不超过100 m时,2站与卫星之间的夹角可近似为0°,即从卫星的角度来看,地面各个观测站位置是重合的,可称为“零基线”状态。此时,式(1)右侧参数中,除2站钟差和设备时延外,其余参数接近于完全对称,可以相互抵消,式(1)可简化为:
(3)
此时卫星双向时间比对钟差仅与观测伪距、设备时延有关,对式(3)做进一步变换:
(4)
在零基线条件下,2个站点间的钟差可以通过实际测定的方式直接得到,此时可以通过观测伪距和时间同步站实测钟差来获得2个时间比对站的设备组合时延[10],令:
(5)
式中,τAB为参与卫星双向时间比对站A,B之间的设备组合时延。
根据前述介绍,站间时间同步试验系统中共有A,B,C三个站参与卫星双向时间比对,因此可以获得3个设备组合时延τAB,τAC,τBC。
设备时延是指信号在设备中的传输时间,在正常情况下是一个相对稳定、变化缓慢的量值。根据式(5),A,B,C三个站设备组合时延闭合差为0,
(6)
若由于设备自身故障导致站间时间同步闭合结果发生跳变,则会反映在设备时延上,3站设备组合时延将不闭合,这是基于设备组合时延稳定性分析站间时间同步闭合结果跳变的基础。由于3个站参与时间比对,若A站设备出现异常,则设备组合时延τAB,τAC均会出现问题,而τBC则保持正常,因而按照上述方法设计,可以直接定位有问题的时间同步站。
3.2 诊断方案设计
设计站间时间同步结果跳变问题诊断方案如图5所示。
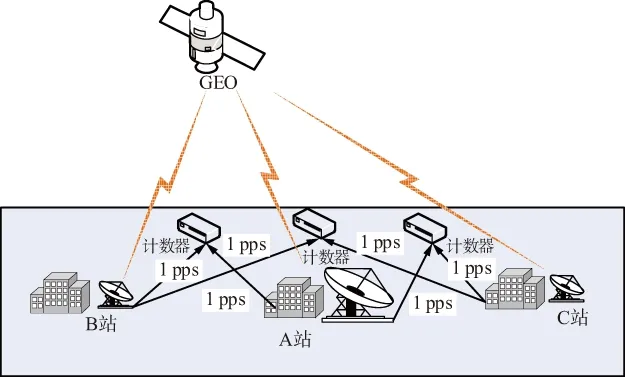
图5 站间时间同步闭合结果跳变问题诊断方案
同一场区的A,B和C卫星双向时间同步站之间的参考时间信号两两之间通过计数器直接测量,并记录各站的观测伪距,根据式(4)可计算得到3个设备组合时延τAB,τAC,τBC。
为将站间时间同步闭合结果跳变问题触发,结合设备实际运行状态,设计5个场景下的卫星双向时间比对设备组合时延测定工作,包括:
① 正常运行条件下的站间组合时延差测量
不对设备运行状态做任何改变,选取一段时间进行组合时延测量工作。
② 卫星双向时间同步设备开关机条件下的站间组合时延差测量
主要对参与试验的各个站卫星双向时间同步设备、对发射和接收终端依次进行多次开关机,统计各次开关机前后的组合时延。
③ 时频设备开关机条件下的站间组合时延差测量
主要对参与试验的各个站的时频设备多次开关机,统计各次开关机前后的组合时延。
④ 时频设备输出1 pps相位调整条件下的站间组合时延差测量
主要对参与试验的各个站的时频设备输出的1 pps信号进行多次移相,统计各次移相前后的组合时延。
⑤ 时频设备互换条件下的站间组合时延差测量
主要对参与试验的各个站的时频设备进行互换,统计互换前后的组合时延。
4 实验过程与问题定位
4.1 实验过程
按照方案设计分别进行如下试验:
① 正常运行条件下的站间组合时延差测量。
② 设备开关机前后站间组合时延差测量,包括开关各站站间发射终端、开关各站站间接收终端。
③ 时频设备开关机前后站间组合时延差测量,包括开关B站、C站时频设备第1次;开关B站、C站时频设备第2次;开关A站时频设备第1次;开关A站时频设备第2次。
④ 1 pps相位调整前后站间组合时延差测量
1 pps相位调整主要针对A站、B站时频设备的输出的1 pps信号相对于10 MHz信号进行了调整,各次调整量如表1所示。
表1 精调1pps相位命令设置量
Tab.1 Fine tuning 1 pps phase command setting amount
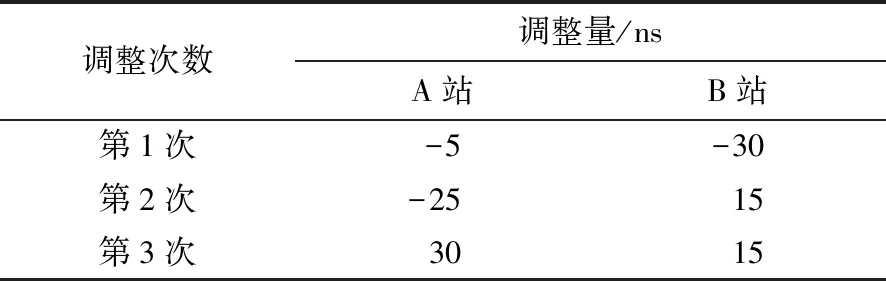
调整次数调整量/nsA站B站第1次-5-30第2次-2515第3次3015
⑤ 时频设备互换前后站间组合时延差测量,包括互换B站和C站的原子钟;将B站和C站的原子钟恢复到初始连接状态。
4.2 实验结果与问题定位
将各站观测伪距和测量钟差按照式(4)依次计算设备组合时延τAB,τCA,τBC,并对各次结果进行平均值计算,结果如表2所示。
表2 各种场景下的组合时延标定结果

Tab.2 Combined delay calibration results for various scenarios
按照静态拷机、站间设备开关机、时频系统开关机、1 pps相位调整、时频切换试验顺序联立的τAB,τCA,τBC以及三者的闭合结果原始数据如图6~图9所示。
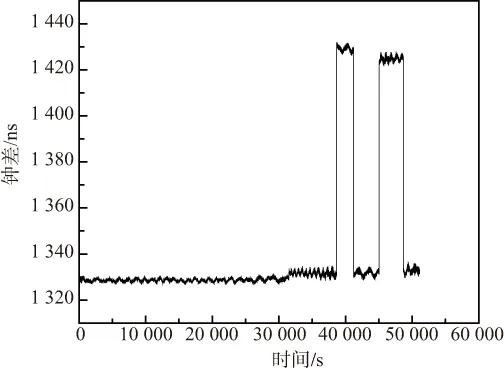
图6 τAB设备组合时延

图7 τCA设备组合时延

图8 τBC设备组合时延
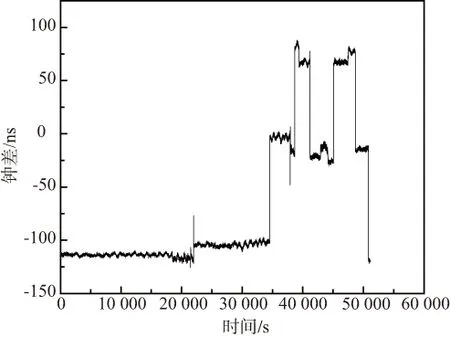
图9 3站设备组合时延闭合差
由图9可以看出,3站设备组合时延闭合结果存在以0值为中心的±100 ns的跳变。结合表2以及图6~图8可以看出,τBC结果基本稳定,但τAB,τCA均存在出现设备时延跳变的情况(表2中下划线示出),因此可判定该问题由A站设备引起。由于组合时延按除2处理,表明A站站间观测数据跳变为200 ns左右。
由于设备测量一致性、时频设备进行1 pps相位调整等原因,各次场景之间测试结果存在10 ns量级左右的波动,属于正常现象,不对试验结果造成影响。
4.3 机理分析
伪码测距的过程由接收处理单元实现,一个典型的接收处理单元一般由A/D模块、FPGA模块、DSP模块、时钟管理模块、电源模块及串行通信接口模块等组成,如图10所示。

图10 信号接收处理单元组成原理
伪码测距过程的核心是对信号的捕获和跟踪,捕获是对频率和码相位参数的粗略估计,跟踪的目的是使这些估计值精确化[11]。从伪码的整个搜索及环路跟踪控制过程来看,可以分为步进搜索相位调整和环路DDS相位微调跟踪处理阶段,前一个阶段的处理包含搜索、捕获,可以直接获得以时间基准点为起点的整数个伪码码片数;环路进入跟踪状态后,由初始跟踪逐渐过渡到精跟踪处理,一个码片以内的微小相位的跟踪调整量,可从跟踪环路中直接获得并在时域进行实现积累,在需要输出伪距观测量时,适时地依照观测时刻打上时间标记后即可采样输出,即伪距观测值=整码片数(捕获阶段)+小数部分(跟踪阶段)。
该站间时间同步系统伪码速率为5 Mcps,单个码片的持续时间码长为200 ns,而A站设备的组合时延跳变量均为200 ns左右,且全部发生在不同的试验场景之间,单次试验过程中并未发生跳变,因此判定A站站间测距终端在信号捕获阶段计算整数个伪码码片时,存在1个码片的不确定性。根据上述结论对接收终端的FPGA和DSP设计程序进行了排查,发现其程序设计上存在错误,使得在信号捕获确定整数个码片时产生了1个码片的偏差,对设备进行改正后,该问题消失。
5 结束语
卫星双向时间同步技术的优点在于双向测量链路具有较好的对称性,大部分误差可以抵消,在零基线条件下,链路接近完全对称,钟差比对模型进一步退化为观测量、实际钟差和设备时延三方面因素之间的关系。由于零基线条件下观测量和实测钟差是直接可测量的,则设备时延可被精确标定,通过观察设备时延闭合与变化情况可对设备故障情况进分析定位。
本实验能够获得成功的关键在于:① 零基线条件下钟差可以直接测定,组合时延的测定较易实现;② 3个时间同步站可以两两进行组合,当只有1个站出现故障时可以进行定位,当仅有2个站时,将会出现只能检错而不能判错的情况。为使本方法更加具有普遍性,如不具备零基线条件时,可以采用其他链路,如GNSS共视和PPP精密时间比对等精度较高、代价较小的手段独立测定钟差,仍可实现远距离条件下的组合时延标定,从而实现对卫星双向同步系统的故障检测或定位。
猜你喜欢
出版人(2022年11期)2022-11-15
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年4期)2022-08-15
计算技术与自动化(2022年1期)2022-04-15
今日农业(2021年19期)2021-11-27
数学小灵通(1-2年级)(2021年10期)2021-11-05
强度与环境(2021年3期)2021-07-27
导航定位与授时(2020年5期)2020-09-23
现代电子技术(2020年13期)2020-08-07
人大建设(2018年7期)2018-09-19