
波浪滑翔机弹性水翼性能模型试验
2020-04-28 08:35周润婕李家炜潘雨婷张芳园田新亮
实验室研究与探索 2020年1期
周润婕,王 鹏,李家炜,潘雨婷,张芳园,田新亮
(上海交通大学 海洋工程国家重点实验室,上海 200240)
0 引 言
波浪滑翔机是一种依靠波浪能驱动的新型水面无人航行器,由于其利用波浪能作为前进能量,可以实现无动力、长时间、长距离的航行[1-2],弥补了现有的海洋监测设备在续航力上的不足。同时,其工作噪声低,工作范围在水面下20 m内,隐蔽性极好,不会对周围环境造成过大影响,可用于环境监测等民用功能,并且具有巨大的军事价值。波浪滑翔机对于复杂、恶劣的气候抵抗能力很强,甚至一些情况下,海况越恶劣,波浪滑翔机动力越强劲[3],故其拥有广泛使用前景。
波浪滑翔机最初于由Roger等于2005年研制。2009年,Liquid Robotics公司设计并研制出了新一代波浪滑翔机SV2,完成了多次海试任务,并投入军用。Frolov等[4]利用波浪滑翔机对蒙特雷湾的海藻生物分布情况进行了长时间、长距离勘测。Daniel等[5]给出了波浪滑翔机设计的综述,并给出了几个不同型号的波浪滑翔机在海试试验中的结果,同时,对波浪滑翔机在蒙特雷海湾中进行的实验的流速等进行预估。Bingham等[6]测试了2台波浪滑翔机,并从自噪声调查中得出这种新平台传播的噪声很小,因此波浪滑翔机是可用于被动监控的理想平台。贾立娟等[7]对波浪滑翔机进行研究,分析其运动机理。丁乃蓬等[8]对波浪滑翔机水翼间距与水翼个数对波浪滑翔机的性能影响进行研究。张禹等[9]应用某势流理论分析软件对波浪滑翔机的运动进行模拟和仿真,发现波浪滑翔机在高海况下可以产生更大推力,但同时阻力也会相应增加。吕元博等[10]根据CFD仿真模拟得出,水翼的最佳逆时针限位角与海况无关,而顺时针旋转限位角随具体海况的变化而变化。Wang等[11]采用牛顿-欧拉法建立了波浪滑翔机的4自由度数学模型,通过仿真模拟得出适当的缆绳长度及波浪滑翔机母船与水下滑翔机部分的重量比能够提高波浪能利用率。
现阶段,国内多家高校和科研机构都对波浪滑翔机进行了不同程度的研究,但总体来说,我国对于波浪滑翔机的创新还相对欠缺,研究规模不大[12]。
本文通过试验验证用于限定水翼下限位角的弹簧刚度与水下牵引机效率之间的关系,从而得出弹性水翼的最优弹簧刚度。
1 波浪滑翔机与其弹性水翼工作原理
波浪滑翔机前进原理为:波浪凸起过程中,水面母船随之上浮并通过柔性缆绳拉拽水下牵引机产生上升运动,此时,水翼向下翻转,表面流体产生一定速度,通过伯努利效应以及流体分子动量改变给予水翼向前的推动力。波浪凹落的过程中,水面母船随之下沉,水下牵引机在自身重力作用下产生下潜运动,水翼向上翻转,流体同样给予水翼向前的推动力(见图1)。
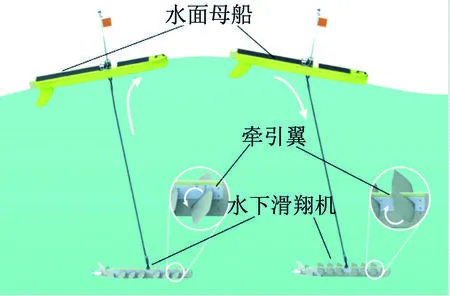
图1 波浪滑翔机工作原理
由于水翼上升阶段受到的向上的合力远远大于其下降阶段所受的向下的合力,故水下牵引机主要在母船上浮时前进,并且水翼下翻速度远远大于上翻速度。若波浪滑翔机工作波高较大,则水翼下翻时,下限位角固定部件之间会产生较强的刚性碰撞,导致能量耗散以及部件疲劳损伤;若波浪滑翔机工作波高过小,水翼可能无法达到最大下限位角处,导致其无法正常上下翻动。若将水翼改进为弹性水翼,即上限位角固定,下限位角由弹簧约束,则工作波高较大时,能避免水翼与下限位角产生刚性碰撞,将此部分能量储存在弹簧中,防止结构损伤;工作波高较小时,弹簧能给予水翼板一定的回复力,提供其前进的动力(见图2)。
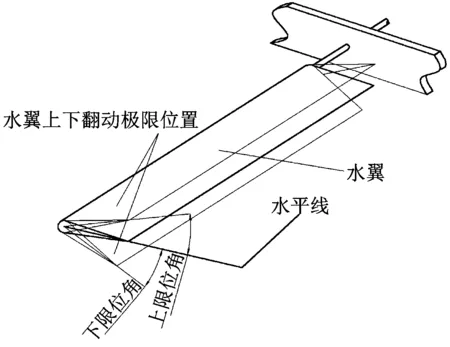
图2 水翼相关角度定义示意图
2 模型试验
2.1 试验准备
(1) 试验设备。波浪滑翔机弹性水翼性能模型试验在上海交通大学海洋工程国家重点实验室小水槽中进行。水槽长20 m,宽1 m,水深可达1 m,可根据不同试验需求调整水槽内水量以改变水深。
试验使用一种用于研究波浪滑翔机运动性能的垂荡激励试验拖车(见图3)模拟水面母船对小车产生的拉力。该拖车包括拖车载体、垂荡激励控制设备。该设备可以通过伺服电机控制器控制与电动机相连的转轮的的转动幅度、周期等,转轮上绕有链接水下牵引机的缆绳,转轮通过缆绳实现对水下牵引机进行不同垂荡运动的激励,以模拟水上部分母船由于不同波浪作用而产生的对水下牵引机的垂向牵引力,并通过其在水槽上移动过一定距离所需的时间判断波浪滑翔机水下牵引机部分的性能[13]。
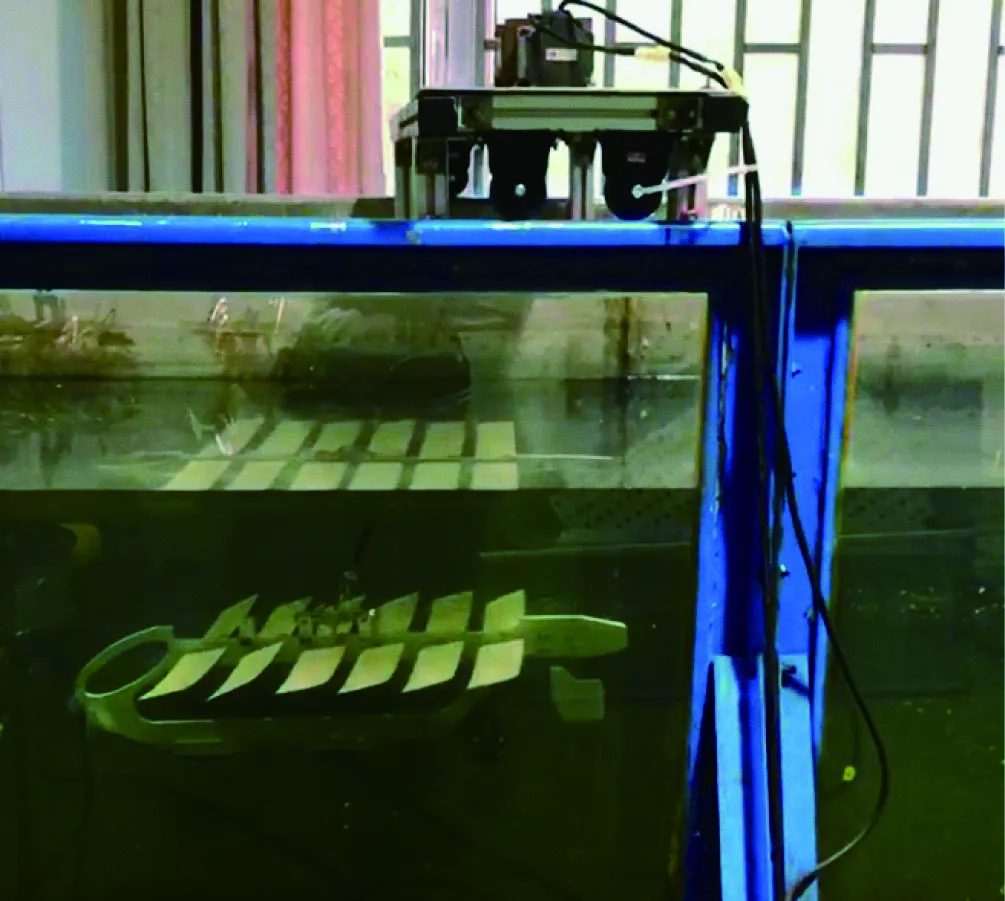
图3 水下牵引机牵引垂荡激励拖车在水槽中运动
水下牵引机部分主要包括骨架、水翼、尾舵,采用6对NACA水翼[14],用3D打印方式制作,质量轻,同时可以保证翼型较精确且6对水翼形状一致。水翼上限位角的大小通过一固定在牵引机机身的螺丝与一随转轴转动的螺丝限制,下限位角通过一连与水翼边缘与牵引机机身的弹簧进行弹性限制(见图4、5)。
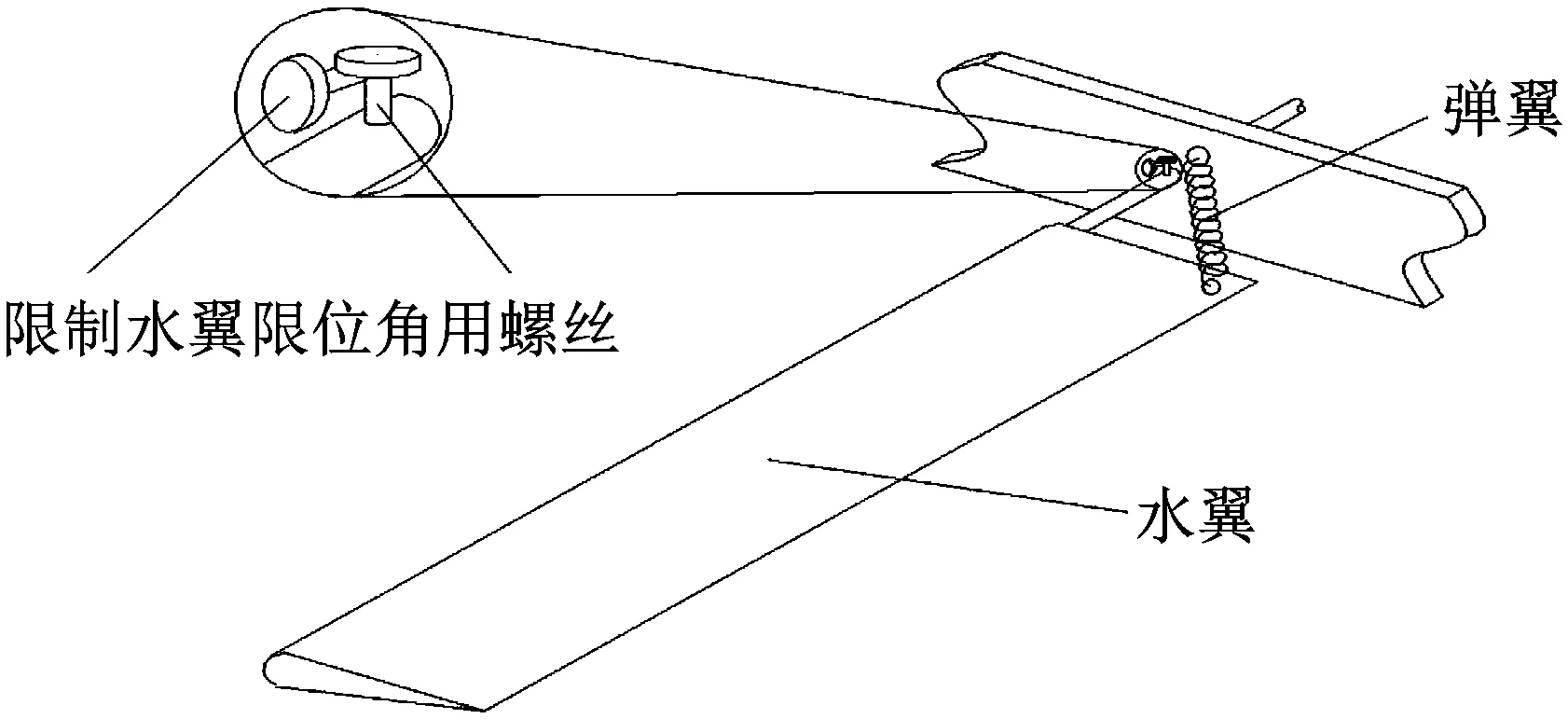
图4 水翼角度限制方式示意图

图5 波浪滑翔机水下牵引机部分模型
根据模型尺寸,将弹簧长度选取范围定为35~45 mm,弹簧半径定为5 mm左右。此处试验选择3种弹簧,并通过改装测量动摩擦因子的摩擦台[15],来完成弹簧劲度系数的测量。测量数据见表1,数据分析见图6。

表1 劲度系数测量试验数据表
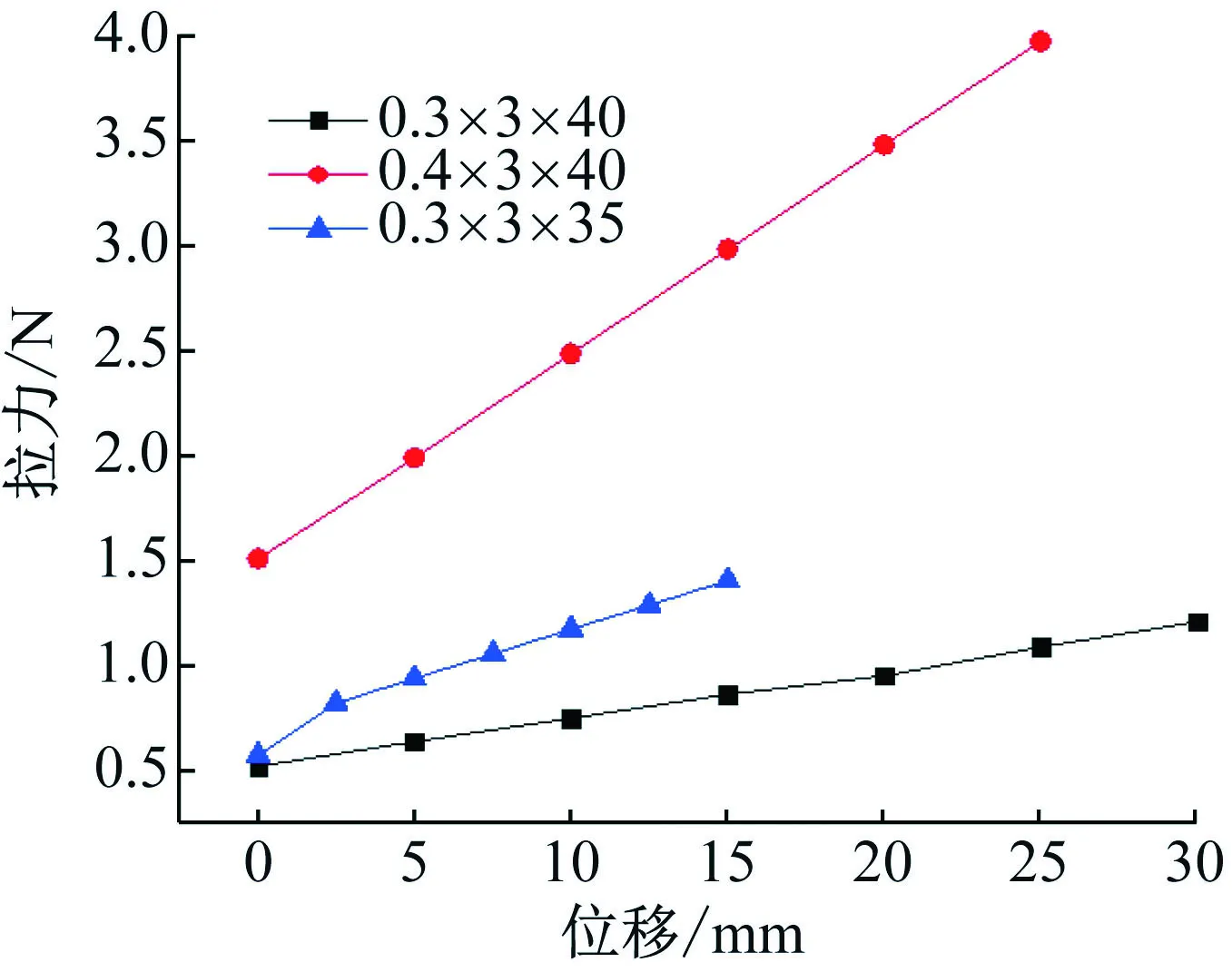
图6 各弹簧所受拉力—伸长量关系图
(2) 环境模拟。模型试验中忽略流体黏性的影响,保持两者重力相似以及惯性力相似,即保持实体和模型之间的Froude数和Strouhal数相等,则有:
(1)
(2)

(3)
同理,式(2)可变形为:
(4)
根据我国海况,试验中计划模拟0.8、0.75、0.68及0.6 m波高,实际波浪周期约为9 s。根据式(3)、(4)并计算拖车搭载电动机传动比,波浪的实际参数与对应的拖车电动机参数如表2所示。

表2 波浪实际参数与对应电机参数
2.2 试验过程
本试验采用控制变量法,在弹性水翼使用某一种弹簧时,测量在几个不同模拟波高下拖车的运动速度。拖车的运动速度通过测量拖车运动一定距离(450 cm)的时间来确定。试验数据如表3~5和图7所示。由于水槽表面不平整,拖车运动速度变化较大,为方便观测试验现象、减小误差,将其运动距离等分为3个区间,每个区间长度为150 cm。时间1、2、3分别为拖车经过第1、2、3个区间所需时间(时间为“-”代表拖车在此区间内动力不足无法前进)

表3 安装弹簧1时拖车运动情况

表4 安装弹簧2时拖车运动情况
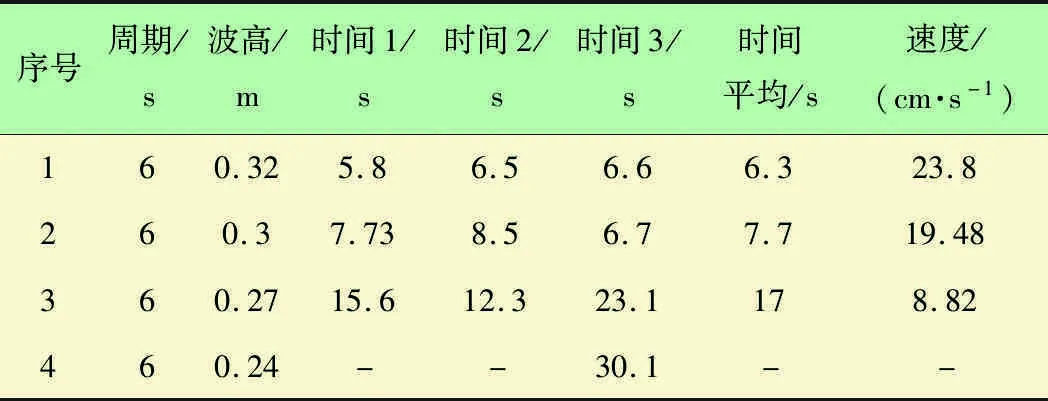
表5 安装弹簧3时拖车运动情况

图7 水下牵引机弹性水翼安装不同弹簧的效率示意图
2.3 试验结果与分析
通过分析试验结果,使用相同刚度弹簧的情况下,电动机输出振幅越大,拖车速度越快。这是由于随着滑动拖车振幅增加,滑翔机垂向运动速度增加,水翼上下表面的液体流速相应增加,根据伯努利原理,水翼能产生更大推力;另一方面,振幅相同,即波浪条件相同的情况下,随着波高的增加,安装有较大刚度弹簧的水翼有着较高的推进效率。这是由于在较大的波浪条件下,刚度较大的弹簧能够储存较多能量,避免水翼上下运动过程中由于刚性碰撞而产生的能量损耗;另外还发现,在滑动拖车振幅较小时,即波高较小时,安装有较大刚度弹簧的水翼无法给予拖车足够的拉力,在某一段区间出现无法移动的情况,而装有较小刚度弹簧的水翼却可以带动拖车移动。这是因为在波高较小时,弹簧刚度过大导致水翼上下运动过程中限位角太小,推进效率下降导致。因而在小波高情况下,刚度较小的弹簧能使水翼有较高推进效率。综上所述,波浪滑翔机水翼弹簧刚度应该根据工作海域的海况决定,海况较恶劣的海域波浪滑翔机水翼可以选择较大的弹簧刚度;反之,海况较温和的海域波浪滑翔机水翼刚度不宜过大。
3 结 语
对水下牵引翼增加弹性限制可有效提高波浪能的利用率,从而提高水翼推进效率。本文通过模型试验方法进行了波浪滑翔机弹簧水翼性能研究,通过试验室自制的水槽滑动小车连接水下牵引机模拟在不同波高条件下弹性水翼的推进性能。试验结果得出,波浪滑翔机水翼弹簧刚度应该根据工作海域的海况决定,海况较恶劣的海域波浪滑翔机水翼可以选择较大的弹簧刚度,反之海况较温和的海域波浪滑翔机水翼刚度不宜过大。本文试验结果对设计在特定海况下的波浪滑翔机弹性水翼刚度提供了数据支撑。
猜你喜欢
海洋技术学报(2021年3期)2021-08-19
数字海洋与水下攻防(2020年5期)2021-01-04
装备制造技术(2020年3期)2020-12-25
知识就是力量(2019年7期)2019-07-01
舰船科学技术(2019年4期)2019-05-16
军事文摘(2018年24期)2018-12-26
小学科学(学生版)(2018年12期)2018-12-19
船海工程(2015年4期)2016-01-05
应用海洋学学报(2015年3期)2015-11-22
舰船科学技术(2015年8期)2015-02-27
