基于组合定位的现代有轨电车雷达防撞系统设计
2020-05-18 11:18王萌
铁道标准设计 2020年5期
王 萌
(中国铁道科学研究院,北京 100081)
随着我国国民经济和社会的发展,城市交通拥堵问题变得日益严重,大力发展公共交通成为解决城市交通拥堵问题的关键。现代有轨电车因相对公共汽车更加节能环保,运力更大,相对地铁轻轨造价更低而得到大力发展,预计至2020年,中国将建设2 000 km的有轨电车线路,有着广阔的市场发展前景。现代有轨电车运行线路非完全封闭,社会交通与有轨电车混行,而国内复杂的社会交通情况,使得有轨电车的运营安全存在较多的隐患,目前各个城市有轨电车的试验或运营过程中均发生了一些程度不同的事故,如何在目前有轨电车非完全封闭、半独立路权等运营条件下对司机人工驾驶提供必要的提醒,降低事故发生几率,是有轨电车逐步朝着智能化运营发展的基础,也是一个值得众多学者研究的问题。梁影等[1]提出了一种基于雷达的可对目标限界关系进行报警输出的有轨电车预警系统;赵振翔等[2]提出了采用2套传感器基于模糊控制原理对测量向量异步数据融合,并给出报警信号的有轨电车防撞系统;夏玉洁[3]等人提出了一种在多目标联合状态下的加权采样思想,并在此基础上引入优化的基本粒子滤波算法,从而提高目标轨迹的跟踪精确度;宋喜玉等[4]在比较现有MIMO雷达资源分配研究方法后,提出了一种新的多目标跟踪下的分布式MIMO雷达资源联合优化算法;蒙广元等[5]在VC++环境下设计开发了一套基于MapX组件的雷达目标跟踪模拟系统。同时,目前国内外许多学者对有轨电车的定位问题展开研究,定位方法大多采用GPS/BD/INS等组合定位方法[6-13]。目前有专家学者将GPS/北斗导航的定位监控应用于民航业的超低空飞行预警,通过4G网络接收定位数据,经防撞系统处理后给出告警信息[14]。然而,对于有轨电车定位与防撞系统的联合研究及应用缺乏关注。因有轨电车行驶路线固定且提前已知,所以在掌握其当前位置的情况下,可直接确定前方路线条件,从而根据轨道路径确定有轨电车行驶的安全区域,极大程度筛选雷达传感器检测到的众多目标,降低系统的误报警率。
1 系统总体设计
本文所研究的雷达防撞系统用于探测现代有轨电车的运行环境,基于雷达、组合定位等非接触的综合检测方式,在各种恶劣条件下,实现有轨电车的正面和侧面防撞预警。
系统中设计雷达发射天线、接收天线,用以测量障碍物在列车前方的距离和相对列车前进轴线的方位角。雷达的探测范围为0~210 m,根据电车的最高速度和最大制动加速度进行计算,得出电车制动距离,当障碍物与电车的距离小于电车制动距离时,进入跟踪处理程序。
根据通号轨道车辆有限公司公布的现代有轨电车主要参数可查得:有轨电车轨距1 435 mm,车辆长度33 550 mm,车辆宽度2 650 mm。以车体外轮廓500 mm处为安全限界,则单侧距轨轴线1 820 mm以外区域可认定为安全区域。如图1所示,绿线以外为安全区域。
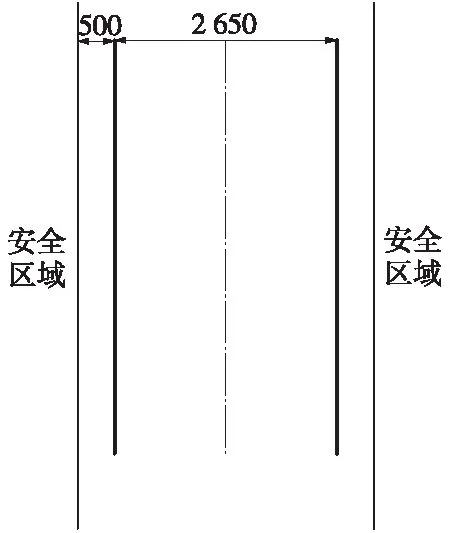
图1 防撞系统限界(单位:mm)
系统的软硬件结构设计方面,系统硬件框图如图2所示。系统的硬件模块包括采集GPS及RFID数据的定位数据处理模块,采集雷达探测信息的雷达数据模块,这两个模块将收集到的数据通过车载计算机对比处理,判断行车安全信息。其中车辆前方障碍物的检测由雷达来完成,前方界限的划定及安全区域范围由定位模块通过获取定位数据得到线路信息确定。显示器与报警模块作为人机交互接口,为司机提供直观的报警信息。
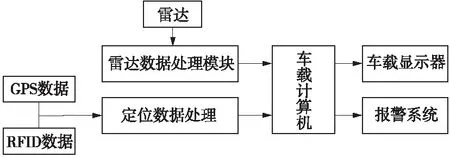
图2 系统硬件框图
系统的软件包含系统信息显示模块、雷达数据接收模块、雷达数据处理模块、雷达图形显示模块、雷达目标数据存储模块、定位数据接收模块、定位数据处理模块和数据融合模块等,系统的软件组成框图如图3所示。当系统开始正常工作后,雷达数据接收模块将采集到的数据传给数据处理模块处理,定位数据接收模块将接收到的数据交给处理模块处理,数据融合模块将处理后的定位数据及雷达数据融合后在界面显示模块中显示。
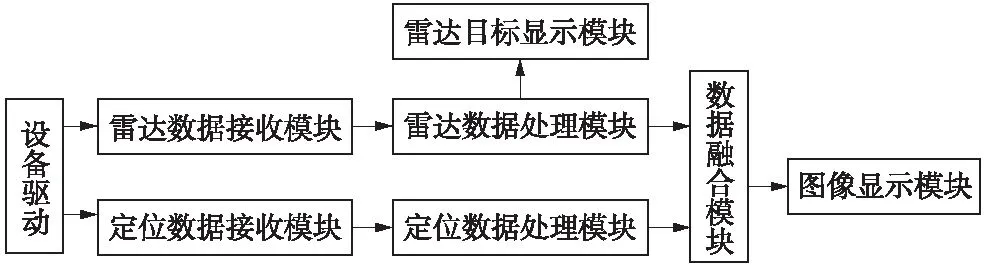
图3 系统软件框图
2 组合定位模块设计
目前轨道交通常见的定位技术主要有卫星定位、RFID定位,惯导定位、轨道电路及应答器定位等。然而卫星定位技术易受高楼、隧道等结构物影响;RFID需要大量标签才能保障定位精度;惯性传感器易产生累计误差;轨道电路与地面应答器需前期铺设好地面设备且不适应现代有轨电车非独立路权的复杂运行环境。之前大多学者采用的有轨电车组合定位方式为多种卫星导航系统组合使用或是卫星定位系统与惯性传感器的组合系统,如孙永梅等提出以GPS为主,航位推算为辅的定位方式[15],石建强等提出通过自适应卡尔曼算法处理GNSS与IMU两种传感器数据的定位方式[16]。但这些组合定位方式前者无法克服卫星定位本身的劣性影响,后者采用的设备价格较高无法满足实际社会需求。因此,从生产实际出发,提出一种更适应市场的卫星定位与RFID定位组合的定位方式。
全球定位系统(GPS,Global Positioning System)为一种利用GPS卫星进行定位的具有全方位、全天候、全时段、高精度的卫星导航系统。射频识别技术(RFID,Radio Frequency Identification)又称电子标签,是一种利用射频信号自动识别目标对象并获取相关信息的技术。采用GPS与RFID的组合定位方式,可在有轨电车运行线路中,对GPS信号弱及拐弯、路口等复杂路况增加RFID标识点密度,其余位置正常设置标识点的方式,提高整体定位精度。
有轨电车防撞系统中组合定位模块,根据有轨电车实际运行线路,可调整射频识别标(TAG)的放置位置和距离。如图4所示,在GPS信号较强且未设置TAG的路段,可仅对接收到的GPS信号进行处理,输出GPS定位信息。在GPS信号强但较复杂的路段,为保证防撞系统整体的安全性和稳定性可增加TAG的数量,同时处理GPS和RFID的数据,最后输出组合定位系统的定位信息。在GPS信号较弱的路段,可通过设置TAG的方式弥补GPS的不足,当未检测到GPS信号时仅对RFID数据处理,输出定位信息。
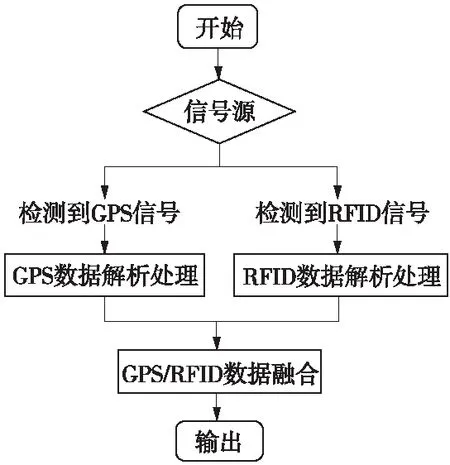
图4 定位模块数据处理流程
定位模块采集到数据信息,经过滤波处理输出。目前有学者提出通过卡尔曼滤波处理有轨电车组合定位模块数据,已修正数据结果,提高定位系统的准确性[17]。在对卡尔曼滤波、扩展卡尔曼滤波、无迹卡尔曼滤波进行比较后[18-19],发现卡尔曼滤波对非线性系统的滤波效果较差,无迹卡尔曼滤波虽会一定程度的增加运算精度和稳定性,但会带来较大的运算量且对模型所产生的误差较为敏感。因此,采用扩展卡尔曼滤波进行组合定位模块数据的处理。
建立连续时间扩展卡尔曼滤波模型,系统方程如下
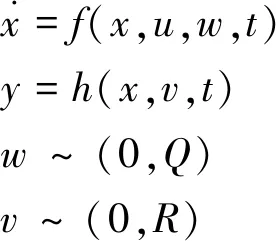
(1)
式中,x为状态量;y为输出量;u为控制量;w和v为噪声;系统方程f(·)和量测方程h(·)为非线性函数。
利用泰勒级数展开,得到

(2)
xk=fk-1(xk-1,uk-1,wk-1)
(3)
用偏微分对当前状态做估计
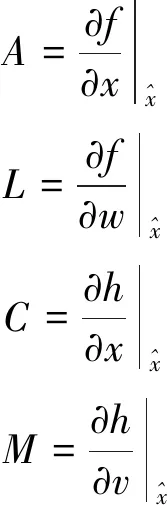
(4)
假设系统各设备均已校准无初始误差,系统的标称噪声值为零,即w0=0,v0=0,则卡尔曼滤波方程为
(5)
其中,P为估计误差的协方差,K为滤波增益,且

(6)
3 雷达探测模块设计
在对红外线、超声波、激光测距、毫米波雷达测距这4种雷达传感器进行比较后发现,前3种采用声光原理设计出的有轨电车防撞雷达虽结构简单,价格低廉,但容易受到恶劣气象条件干扰,无法确保测距精度。综合测距、测速、稳定性、价格等各方面因素考虑,本系统选择ARS 408-21雷达传感器作为有轨电车防撞系统传感器。如图5所示,该雷达为77G毫米波雷达,由发射器、天线及天线接收器、收发开关、接收机及显示终端组成,可用于探测静态目标和运动目标的跟踪,目标数可达60个。具有多目标捕获与区分;探测目标轨迹跟踪;物体存在检测;运动及运动方向检测;测距(目标距雷达波发射点的距离);测角(目标相对雷达的水平方位角);测速(目标相对雷达位置的速度)等功能。
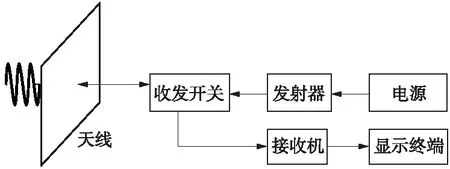
图5 ARS 408-21雷达原理
根据现代有轨电车运营的实际情况,考虑到有轨电车的正常行驶速度较低,且行驶轨道确定以及选取毫米波雷达的采样频率较高,在分析比较目前学者采用的微分多项式模型、时间相关模型、半马尔科夫模型后[20],选取CA和CV模型。同时对于交叉路口等比较复杂的运行环境,引入非线性的扩展卡尔曼滤波算法,对CA和CV算法的估测值进行修正,以保证本研究所采取的目标跟踪算法的准确性和精确性。
CV(Constant Velocity)模型即目标做匀速直线运动

(7)
其连续系统的离散描述表达式为
(8)
式中,x′,x″,x‴分别为运动目标的位置、速度和加速度分量;w(t)是均值为零,方差σ2的高斯白噪声;T为测量数据的采样周期。
CA(Constant Acceleration)模型即目标做匀加速直线运动
(9)
其连续系统的离散描述表达式为
(10)
式中,x′,x″,x‴分别为运动目标的位置、速度和加速度分量,w(t)是均值为零,方差σ2的高斯白噪声,T为测量数据的采样周期。
如图6所示,该系统扫描周期为50 ms以内,测量范围为0~210 m,测距精度0.3 m,目标个数最大范围可达500个,使用77 GHz频段探测,最大探测速度可达180 km/h,速度精度为0.25 m/s,探测角度为45°±5°,雷达模块可对有效范围内物体进行探测,以达到有轨电车运行过程中防撞的效果。
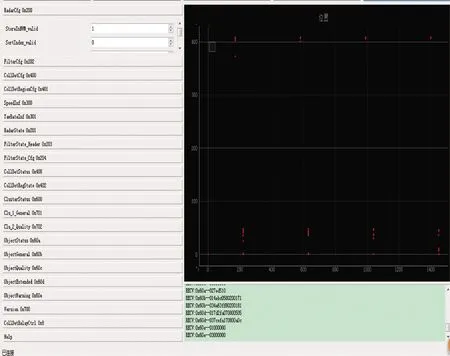
图6 雷达探测模块测试
4 数据处理及测试
本文对整体系统进行了车载测试,验证了所设计的防撞系统的可行性和有效性。如图7所示,防撞系统可根据定位信息确定安全范围,通过雷达探测模块对安全范围内出现的目标跟踪,并根据每个目标的位置作出告警等级判断,向司机发出告警信息,很大程度提高有轨电车运行安全。
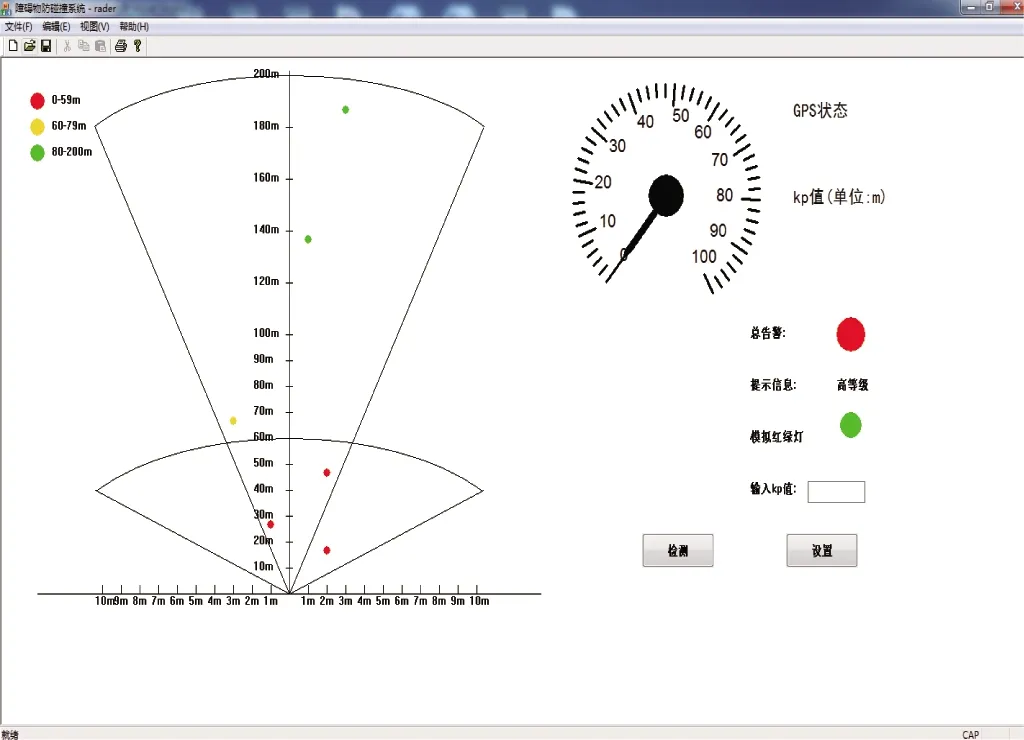
图7 有轨电车防撞系统
5 结论
本文提出一种基于组合定位技术的现代有轨电车防撞系统设计方案。通过扩展卡尔曼滤波将GPS与RFID数据处理融合,解决了单一的GPS定位方式易受高楼、隧道等结构物影响,提高了系统稳定性和定位精度。根据定位信息实时确定列车所在位置的安全区域,结合雷达探测模块检测到的目标位置,将两者数据信息进行对比处理。这两种方法的结合可有效去除列车在十字路口、转弯等复杂线路情况下产生的误报警情况,作出安全判断,对司机发出告警信号。实验证明,该防撞系统可有效监测列车运行环境中各类障碍物,提高有轨电车运营安全。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
电子制作(2019年15期)2019-08-27
电子制作(2019年23期)2019-02-23
小学生学习指导(低年级)(2018年12期)2018-12-29
汽车工程师(2018年1期)2018-07-13
北京航空航天大学学报(2017年9期)2017-12-18
东方教育(2017年17期)2017-10-31
火控雷达技术(2016年3期)2016-02-06
火控雷达技术(2016年2期)2016-02-06