
含柔顺关节并联机器人运动性能的研究
2020-05-21 03:29高慧芳
机械管理开发 2020年3期
高慧芳, 田 浩
(1.中国电子信息产业发展研究院, 北京 100048; 2.北京飞利信科技股份有限公司, 北京 100191)
引言
通过结合并联机器人和柔顺关节的性能特点,构成的柔顺关节并联机器人,由于使用柔顺关节作为运动副传递机器人系统运动,能够避免由传统运动副产生的运动误差[1],从而改善机器人性能。
文献[2-4]分别设计出具有宏观尺度变形特征的片簧型柔顺关节、扭簧型/缺口型柔顺关节、开槽型柔顺关节,具有扭转角度大、轴心漂移小等优点。但研究内容对柔顺关节的自身特性对系统整体性能的影响缺少考虑。
由于柔顺关节存在轴心漂移误差,为降低其影响,研究者采用构型设计方法,设计出车轮型[5]、圆环型[6]、辅助支撑型[7]、裂筒型[8]等构型的柔顺关节,有效降低了轴心漂移误差。但上述研究设计的柔顺关节需要改变机器人系统的结构及传动形式。本文将在不改变机器人原有结构的基础上,研究使用柔顺关节替代刚性关节对机器人性能产生的影响,所以不适用于本文研究。
由于柔顺关节自身的低刚度特性,使得应用柔顺关节构成的宏观大范围运动柔顺关节并联机器人的刚性较低,当系统进行宏观大范围运动时,极易引起柔顺关节的弹性振动,对机器人运行精度造成严重影响。为此,需要通过合理的机器人运动规划,保证系统的平稳运行。
本文以柔顺关节并联机器人为研究对象,针对轴心漂移误差,设计漂移补偿运动规划方法和S 型速度曲线相结合的运动规划方法。通过仿真试验,验证了该运动规划方法的有效性。
1 柔顺关节并联机器人运动规划
图1 是平面三自由度柔顺关节并联机器人系统,以柔顺关节自身的弹性变形传递系统运动,详细运动学分析过程详见文献[10]。
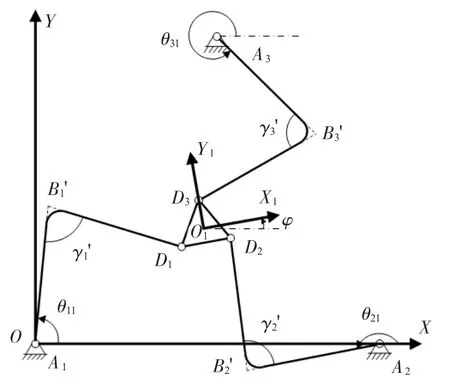
图1 平面三自由度柔顺关节并联机器人机构示意图
1.1 轴心漂移补偿运动规划
下页图2 中,如果已知动平台位姿X,Di点的位置坐标可由几何关系确定,根据定平台的结构参数确定Ai点的位置坐标,从而可以得到ΔA1D1A2的各边长度,由余弦定理计算内角α1,得到:

研究中考虑柔顺关节并联机器人主动杆和从动杆杆长的变化量一致[9],由于主动杆和从动杆的原始杆长相等,所以在ΔA1B1'D1中,主动杆1 和从动杆1实际杆长r11和r12相等。如果已知主动杆的关节角位移θ11,由正弦定理得到:
式中:φ1=θ11-α1,γ1'=π-2φ1。
同理,可得主动杆2 和从动杆2 的实际杆长r21和r22,主动杆3 和从动杆3 的实际杆长r31和r32。
当已知主动杆关节角位移及相应的动平台位姿时,应用以上实际杆长计算方法,确定机器人系统各主、从动杆的实际杆长,然后调整主动杆的期望关节角位移,补偿轴心漂移误差。
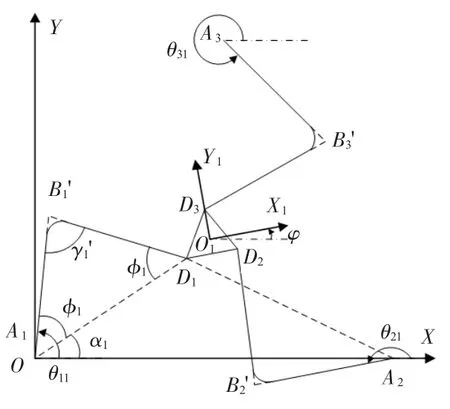
图2 主动杆1 和从动杆1 的实际杆长计算
1.2 笛卡尔空间速度曲线规划
本节将在笛卡尔空间,对柔顺关节并联机器人的末端期望轨迹进行规划,保证运行精度。由于柔顺关节的低刚度特性,当机器人系统运行速度较高时,如果速度或加速度发生突然变化,容易使柔顺关节产生弹性振动,S 形速度曲线是能保证运动系统加速度连续的最低阶次的速度规划曲线,且速度曲线光滑连续,无加加速度脉冲。本节将基于S 型速度曲线,在笛卡尔空间规划机器人的期望末端轨迹。
已知S 形速度曲线的最大加速度amax、最大速度vmax、最大加加速度jmax、起点速度vs及终点速度ve。设计S 形曲线的加减速过程对称,即满足a2=a6,j1=j3=j5=j7;为满足快速性要求,规划过程中要求系统尽量以最大速度及最大加速度运动,即a2=a6=amax,j1=j3=j5=j7=jmax。根据上述设计要求,得到S 形速度曲线的加速度方程为:
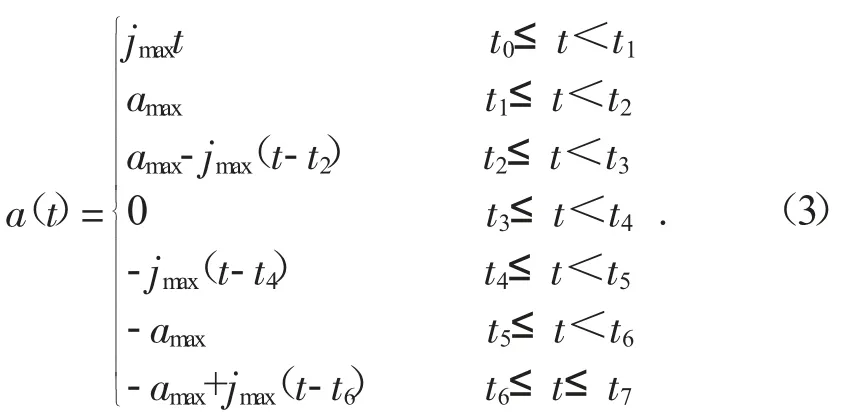
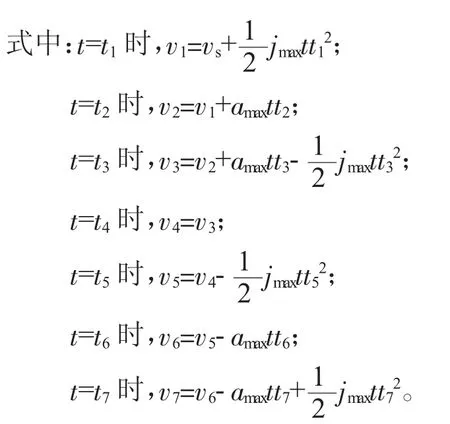
公式(3)对时间求积分,得到速度曲线方程,定义tti表示各段轨迹的时间增量,即tti=ti-ti-1。

公式(4)对时间求积分,得到位移曲线方程,公式(3)对时间求微分得到加加速度曲线方程,因篇幅限制不逐一给出。
2 仿真研究
使用由SolidWorks、ANSYS 及ADAMS 建立的柔顺关节并联机器人系统的虚拟仿真模型[10]进行仿真研究,验证运动规划方法的性能。
已知动平台的期望轨迹是以Q1点为圆心,半径为R的圆轨迹,以及从起点Q1点到圆轨迹起点以及圆轨迹终点返回起点Q1点的两段直线,其中Q1=(450,260),R=100 mm。设定规划参数为:vmax=83.33 mm/s,amax=200 mm/s2,jmax=700 mm/s3,vs=ve=0。
仿真试验是使用轴心漂移补偿运动规划方法和S 形速度曲线规划方法对机器人系统进行运动规划,图3 对比了使用本文提出的规划方法和未使用该方法的机器人末端轨迹,结果可以看出,使用本文提出的规划方法后机器人末端轨迹与期望轨迹的吻合度较高。
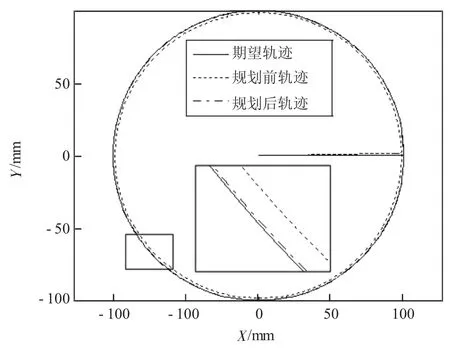
图3 轴心漂移补偿运动规划方法的末端轨迹
下页图4 给出了使用本文提出的运动规划方法前后,机器人沿两坐标轴方向的末端轨迹误差,可以看出规划前机器人的末端轨迹有明显误差,沿两坐标轴方向的误差在[-3 mm,3 mm]的区间内,而规划后末端轨迹误差显著降低,沿两坐标轴方向的误差缩小至[-1 mm,1 mm]的区间内,下降幅度明显,机器人的运行精度显著提高。
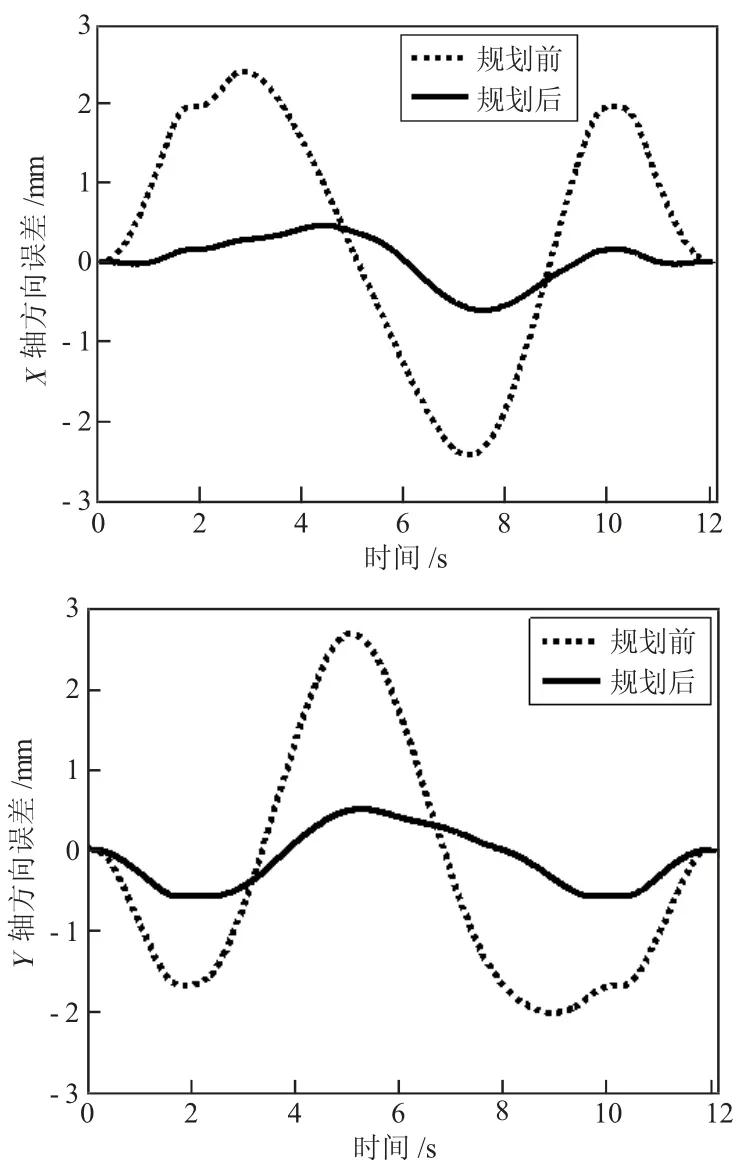
图4 末端轨迹误差
3 结论
以柔顺关节并联机器人为研究对象,使用轴心漂移补偿规划方法和S 形速度曲线规划方法对机器人进行了运动规划。仿真结果表明,提出的运动规划方法,有效抑制了柔顺关节的轴心漂移误差,提高了柔顺关节并联机器人的整体运行精度。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
建材发展导向(2019年10期)2019-08-24
现代装饰(2018年5期)2018-05-26
小学教学参考(数学)(2018年2期)2018-03-16
中国三峡(2017年9期)2017-12-19
中国三峡(2017年2期)2017-06-09
中国环境监察(2016年7期)2016-10-23
腹腔镜外科杂志(2016年10期)2016-06-01
