浮动状态下模块装船集成测量技术
2020-06-08 04:11杨现阳王天一田从永葛仁磊刘荣坤
化工设计通讯 2020年5期
杨现阳,王天一,田从永,葛仁磊,刘荣坤
(海洋石油工程股份有限公司,山东青岛 266555)
近年来,随着公司业务的拓展,产品由原来的导管架、组块等传统海洋平台向LNG模块、超大型半潜平台及FPSO大型储油轮转移。在生产这些产品的过程中,都面临着同样的问题,即集成装船。LNG模块需要通过大型船舶运输到另外一个生产现场,半潜平台及FPSO平台需要对其上的功能结构物和设备进行浮动集成。
第一种集成方式,模块与船体之间分属相对独立的个体。集成期间,不需要考虑模块与船体的功能对接,只需将模块放在船甲板上即可;
第二种集成方式,待集成的模块、设备与船体是一个整体,集成期间,不仅需要考虑单个结构的位置,还需要考虑被集成结构之间以及与船体之间的功能关系。
浮动状态下的集成模式能够大大缩短坞期,提高滑道、吊机资源的利用率。
1 浮动状态的参数描述
目前,常用测量硬件、软件都已经发生很大的变化。高精度的全站仪已经达到了0.5s的精度。但是当面对上述问题时,仍然面临不小的挑战。本文主要讨论具备下属姿态的浮动船体之上的集成模式:
(1)纵倾和横摇幅度都应保持在5°左右;
(2)摆动频率也应相对稳定,每分钟不超过30次;
(3)不发生震荡式摇摆;
(4)船体主要结构应整体摇摆,相互之间,没有明显位移;即物体处于轻微的、整体的、摇摆浮动状态。
2 浮动船体影响精度的主要因素
2.1 高精度测量仪器的补偿器在浮动状态下失效
高精度测量仪器是集电磁波测距和电子经纬仪为一体的全站仪,根据其结构特点和测量环境,存在三轴误差:
(1)视准轴误差
该误差是由于视准轴与横轴不垂直引起的误差,即照准误差。
(2)水平轴误差
该误差是由于水平轴与竖轴不垂直引起的倾斜误差,即横轴倾斜误差。
(3)竖轴误差
该误差是由于仪器的竖轴偏离铅锤位置引起的误差,即竖轴倾斜误差。
第(1)、(2)种误差一般是仪器本身误差;
第(3)种误差是架设仪器时,由于仪器整平不完善、竖轴晃动、土质松软引起脚架下沉或因振动、温度、风力等因素产生的误差。
全站仪的测角误差分为两种,即竖直角误差(天顶距误差)和水平角误差。
竖直角误差来源于全站仪的第(3)种误差。
水平角误差来源于全站仪的第(1)、(2)、(3)种误差。
表1为配套机载程序自由设站实验数据。
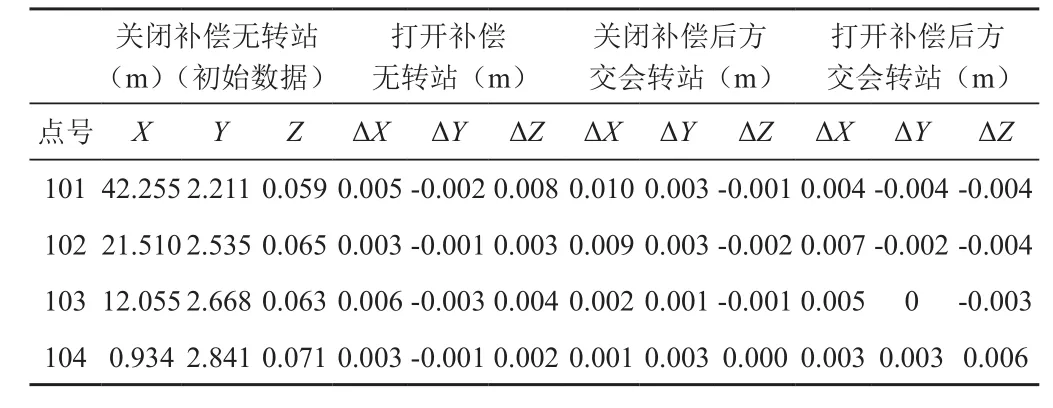
表1 浮动状态下自由设站实验数据
从表1可以看出,数据误差最大为10mm,已经失去了高精度全站仪测量的意义。
2.2 重量引起结构变形
(1)船体自身结构重量所致结构变形
船体在建造阶段,其外底板水平应保持在特定公差范围之内,但在其处于漂浮状态时,将会产生拱度变形,2m的变形可达1mm。原来布设在船上结构物的基准,将因此发生位移,若使用原来基准进行测量作业时,将产生较大误差。图1为大型储油轮159m轨道所产生的拱度差,从图1看出,最大可达71mm。

图1 船体拱度变化图
(2)不断累积的集成模块与设备重量所致结构变形
船体在漂浮状态时,其上的结构物将分批次集成,重量的累计和不均匀,将导致船体基准的二次变形,此种变形会不断累积,且不均匀。
2.3 对接口基准精度不匹配
船体集成接口主要包括:
(1)主船体与上部模块对接
(2)主船体与甲板上主要设备的对接
(3)管线与模块的对接
(4)管线与管线之间的对接
(5)附属结构与主船体的对接
参考浮动船体常用建造标准及设备厂商使用说明书,对不同位置的精度要求如下:
(1)主船体结构一般为±15mm
(2)船体上部模块一般为±10mm
(3)管线一般为±3mm
(4)设备一般为±1mm
若不关注施工工艺中各个结构的精度,其精度传递会逐步下降,而被控制结构物的公差要求从下而上却越来越严格。二者之间的矛盾将对精度控制带来不利影响。
2.4 作业空间受限
作业空间一般在300m×80m之内,区间内有各种模块、设备、管线、附属结构以及脚手架。受限的作业空间,主要会带来以下几种问题:
(1)视线遮挡
对于关键点的测量,需要在一站测量,实体障碍物的存在会造成测量视线无法透视,降低测量精度。
(2)交叉作业使不可控因素被放大
其他作业,如切割、焊接、敲击等测量同步进行时,其震动和遮挡产生的影响会因为空间狭小而被放大,从而降低测量精度。
(3)标定测量点困难
主要结构交叉点,在受限空间内会被遮挡或者被覆盖,需要用其他测量点代替,将降低测量精度。
2.5 结构对位不准确
结构对位不准确包括组对偏差、焊道变形等因素。结构的对位偏离会造成基准传递的不准确,尤其是单个结构,如单个设备、单根管线需要定位时,若采用附近的结构定位,将会导致被测量物在整个基准系统里产生偏差。
2.6 温度变化
通常情况下,船体模块支座与模块支座往往不在一个时间段内,甚至不在一个场内建造,但需要在一个地方完成集成。季节变化以及一天的不同时间段,温差都会有很大的变化。钢材热胀冷缩的性质,使得其相互之间的尺寸对温度很敏感。此变化将会导致结构对位偏差。
3 浮动状态下集成的关键措施
3.1 全站仪补偿器的合理使用
一般来说,全站仪有三种补偿模式:
(1)单轴补偿
此种方式经常用在光学经纬仪上,只能补偿由于竖轴倾斜而引起的垂直度盘读数误差。
(2)双轴补偿
此种补偿器是当仪器竖轴倾斜时,能自动改正由于竖轴倾斜误差对垂直度盘和水平度盘读数的误差。
(3)三轴补偿
此种补偿器不仅能补偿竖轴倾斜引起的垂直度盘和水平度盘的读数误差,还能通过机载软件补偿视准轴误差和横轴倾斜误差对水平角的影响。
高精度全站仪都采用三轴补偿模式,一般分为两个选项,即补偿器和水平角改正。此种补偿器不仅能补偿竖轴倾斜引起的垂直度盘和水平度盘的读数误差,还能通过机载软件补偿视准轴误差和横轴倾斜误差对水平角的影响。表2为三轴补偿器的四种组合情况。

表2 三轴补偿型全站仪补偿器开闭状态及对应功能
在浮动状态下,竖轴处于倾斜状态,将导致其补偿器增加额外误差,所以必须将两个选项全部关闭。
3.2 基于整体控制的基准精确传递
船体控制基准由基准点组成,由点连线,由线成面。典型的基准点包含X、Y、Z三个方向的信息,用于组成整体的大型控制网,点数较少,精度较高,一般在船坞内搭载之前建立。有些基准的平面基准和高度基准是相互独立的,用于灵活机动地控制结构局部位置。
(1)平面基准的传递
平面基准的船体包括基准点和基准线两种类型,对于基准点,一般采用高精度全站仪,围绕被控制物布设,也可采用经纬仪配合吊线锤的方式,将关键控制点的平面坐标返定到主要结构上,由点连线,即可生成控制基准线。
(2)高度基准的传递
高度基准的传递可采用全站仪,也可以用水平仪。采用全站仪时,只用三维坐标的Z坐标,实现高低换算。水平仪需要配合标尺,在船舶未下水之前,预先将船坞内的固定起始基准依次转移到需要的结构上来,如船坞内外底板水平和标高基准等。
若要精确控制某局部结构,需要布设局部基准,此类局部基准需要和坞内地样线基准联测。
3.3 基于关键结构的定点定线方法及管理点表格
关键结构的测量点,能够有效地标识结构位置,也有利于基准的传递。一般情况下,测量点要标识在主要结构的中心线交叉点位置,常用五点标识法。集成时比较关键的基准点一般为:
(1)船体结构中心线
(2)船体模块支墩中心点
(3)船体主甲板平面控制点
(4)附属结构局部平面控制点
集成的关键结构点,需要生成单独统一的管理点表格,发送现场施工,注意保护避让,采用工程项目管理手段提高测量精度。
3.4 基于最佳拟合的基准转换
在稳定状态下,一般的测量转站作业,可采用全站仪的机载后方交会程序,但在浮动状态下,由于没有稳定的水平基准,此种方法将不能利用。但是可以在关闭全站仪补偿器的状态下,进行数据采集作业。若要对不同的站点之间的数据进行统一坐标,可在计算机中,编制基于最佳拟合的转站程序,实现多站点之间的基准转换。不同站点之间应有不少于三个重复点,其最佳拟合方式可采用基于最小二乘或者偏差绝对值最小的模式。
3.5 基于平滑过渡的曲面基准的小范围应用
船体主甲板上用以合拢的基准线,在未漂浮之前,应与水准面保持平行,但在入水之后,由于重量的影响,整个船体在船长和船宽方向,都将产生拱度。原来设定在主船体上的基准将会一起发生变形。在用基准进行测量作业时,变形的基准与预定的整体基准将产生偏差,从而导致被测物发生偏差。
因此,在船长和船宽方向,依次控制集成的模块时,应保证其对接位置的平滑过渡,采取的措施如下:
(1)应根据整体基准,计算船体拱度,可将拱度分割成每1m的大小
(2)对被测物的最大公差要求进行研究,对比计算其所在范围内的拱度对其精度影响
(3)小范围的基准范围应稍大于被控制的结构物
(4)小范围的基准应尽量对称
(5)相邻被测物应联系测量
变形之后的曲面基准可被划分成若干小范围的平面基准,在精度目标范围内,需要灵活使用。
3.6 基于摄影测量的局部高精度测量方法的应用
对于精度要求为亚毫米级的结构,如关键设备底座、关键设备的中轴对中、管线,可采用工业摄影测量方法。其基本原理是在不同位置和方向获取被测工件两幅或多幅数字图像,经图像预处理、标志识别、图像匹配、空间三角交会及光束平差后得到待测点的三维坐标。依据点的三维坐标对工件进行几何尺寸检测、变形测量、逆向工程分析等。该系统一般有专用工业相机、自动定向规、长度基准尺、回光摄影标志组成。
此种测量方法的精度可达微米级,但在使用时,应考虑光源、分辨度等相关因素。
3.7 温度改正
此种方法是把所有的测量数据,根据经验公式,归算到某特定温度,一般为20℃,其计算公式一般为:

不同的材料有不同的系数,碳钢系数一般为0.000 012,具体系数可根据经验数据计算确定,以便更贴近实际情况。
4 结语
综上所述,浮动状态下,影响模块集成精度的因素很多。对单个结构物来说,影响其精度的因素可能是一个,也可能是多个。在实际操作过程中,需要首先分析所要到达的精度目标,并分析整个集成过程中的主要影响因素,综合项目管理手段,制定有针对性的可执行方案,因时因地地予以规避,高效快速地达到既定精度目标。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
新型工业化(2022年5期)2022-06-17
导弹与航天运载技术(2022年2期)2022-05-09
湖南电力(2021年4期)2021-11-05
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
昆钢科技(2020年6期)2020-03-29
船舶标准化工程师(2019年4期)2019-07-24
电子制作(2017年2期)2017-05-17
现代职业教育·中职中专(2016年4期)2016-10-21