
车道保持系统研究
2020-06-11 00:44季鑫
汽车实用技术 2020年10期
季鑫


摘 要:为了减少由于驾驶人分心或疲劳造成的车道偏离事故,提出一种车道保持控制系统。根据道路线性将道路分为直线路段和曲线路段,利用跨道时间来判断车辆将偏离车道;驾驶员的操作状态根据转向灯信号及转矩信号来进行判断。综合车道偏离信息与驾驶员操作信息来判断车道保持系统是否工作;车道保持系统的控制策略采用单点预瞄最优曲率驾驶员模型。仿真结果表明,模型能够实现车道保持功能。关键字:车道保持系统;驾驶员模型;联合仿真
中图分类号:U462.1 文献标识码:A 文章编号:1671-7988(2020)10-46-03
Research on lane keeping Assistance system
Ji Xin
( School of Automobile, Changan University, Shaanxi Xian 710064 )
Abstract: In order to reduce lane departure accidents caused by driver distraction or fatigue,we study Lane Keeping Assistance System. This article divides the road into straight sections and curved sections according to road linearity, and uses cross-lane time to judge whether the vehicle is in danger of deviating from the lane. The driver's operation state is judged based on the signal signal and the torque signal, and the information of the lane departure is combined with the driver's operation information to judge whether the lane keeping system is working. The control strategy of lane holding system adopts the optimal curvature driver model with single point preview. Simulation results show that the model can realize lane keeping function.
Keywords: Lane-keeping system; Driver model; Co-simulation
CLC NO.: U462.1 Document Code:A Article ID: 1671-7988(2020)10-46-03
1 引言
车道保持辅助系统(Lane Keeping Assistance System,LKAS)的发展基于车道偏离预警(Lane Departure Warning System),是防止车辆在正常的行驶过程中由于车道偏离发生交通事故。车道偏离预警系统能提醒驾驶员,车辆此时有驶出当前车道的危险,以此来提高车辆主动安全,降低车辆因偏离车道而引发交通事故的概率[1]。车道保持系统能在车辆偏离车道线且驾驶员未采取相关措施时,接管车辆进行控制,使车辆回到车道中心线行驶。本文基于Carsim与MATLAB/ Simulink的联合仿真,验证车道保持控制系统控制策略的正确性。
2 车道保持系统的控制策略
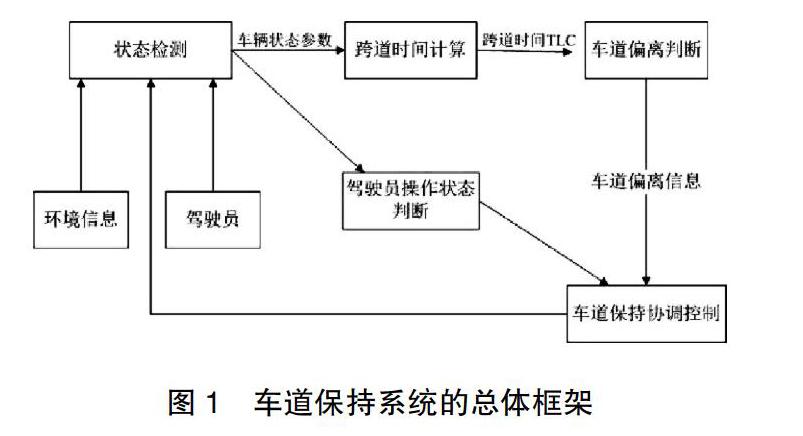
车道保持系统是根据车-路相对位置以及车辆的当前状态参数来计算车辆的跨道时间,从而判断车辆是否会发生车道偏离。为保障驾驶员操作的最高优先级,首先需判断驾驶员是否主动操控车辆,综合车道偏离信息来决定车道保持系统是否接管车辆。若车道保持系统接管车辆,则处于自动转向模式,根据车道保持控制算法,计算此时车辆的理想方向盘转角,作用于车辆,使方向盘转动相应角度,从而回到道路中心行驶。具体框架如图1所示。
根据驾驶员是否打开转向灯来判断驾驶员的操作状态。转向灯打开则认为驾驶员正主动操纵车辆,驾驶员优先控制车辆,按照驾驶员的意图进行超车或换道,该情况下即使跨道时间小于设定阈值,系统也不会发生预警及干涉。如果驾驶员未打开转向灯进行换道或超车,认为驾驶员无意识操作车辆,车道保持系统起作用。此外,驾驶员遭遇紧急情况时,虽然未打开转向灯,但驾驶员作用于转向盘上的力矩要比正常驾驶时更大,因此通过转向盘上的转矩来判断驾驶员是否正在进行紧急操纵[2]。
本文选择的车道偏离的判断模型为基于车辆跨越道路邊界线的时间模型即TLC模型[3]。通过建立车辆运动学模型,根据当前车辆的行驶轨迹来预测将来车辆的行驶轨迹,并计算车轮接触车道边界线的最小时间即跨道时间(Time to Lane Cross,TLC)。如果TLC值大于设定阈值,则不发生车道偏离。如果计算得到的TLC值低于设定阈值,说明车辆有驶出当前车道的趋势,发生车道偏离。
本文选择郭孔辉提出的单点预瞄最优曲率驾驶员模型作为车辆控制方法[4]。
通过对驾驶员模型的分析,我们最终可得最优方向盘转角:
d为距离,δ代表方向盘转角,i表示转向系传动比,L代表轴距。
3 仿真实验设计
设计车道保持系统的前提条件是建立人-车-路的闭环系统,该闭环系统包括以下模型:车辆模型、道路模型、驾驶员模型、车-路相对位置模型。
3.1 车辆模型
本文的车辆动力学模型基于车辆动力学仿真软件Carsim搭建的,Carsim中车辆模型精度较高,提供的信息包括偏航角、纵向速度、侧向速度等。本文使用某款轿车的主要参数如表1所示。除了上述的结构参数,制动系统、动力系统和空气动力学特性等参数选择默认值。
3.2 道路模型
道路模型是车辆在仿真行驶中的环境,也是车辆在行驶过程中的参考路径。道路模型可以根据输入的数据生成精确的空间三维路面模型,在该模型中,包括道路的线形、道路的纵断面、道路的横断面,此外还可以对路面附着系数、道路的起伏等参数进行设置。本文建立了直线段模型与曲线段模型,直线段为100m的直线路段,曲线段为曲率半径为900m的圆弧段路段。
3.3 驾驶员模型
驾驶员模型根据是否含有预瞄环节可以分为预瞄跟踪模型和补偿跟踪模型两大类,本文选择驾驶员预瞄跟踪系统中的最优预瞄模型。在预瞄时间内,确定车辆的运动状态及其与车道的相对位置,然后建立车辆的目标侧向位置与实际侧向位置间偏差,从而算出方向盘转角。在曲线路段的仿真计算中,加入了PID反馈控制,使得车辆模型能够更好的跟踪预先设定的路径。
3.4 车-路相对位置模型
车-路相对位置模型即跨道时间模型。跨道时间的计算要基于车辆模型和车辆运动状态,在预测过车辆的运动轨迹之后,计算车辆从当前位置行驶至车轮接触道路边界线所需要的时间。
3.5 仿真模型
具体的仿真分为直线路段与曲线路段两个模块,由于曲线路段的模型较为复杂,加入了PID反馈控制。
4 仿真结果
4.1 仿真结果
仿真工况:车速72km/h,仿真时间25秒,预瞄时间为0.8s在仿真开始时,方向盘初始角度为0°,在车辆行驶2秒时给转向系统一个向左的阶跃输入,使车辆向左偏离车道,在车辆行驶13秒时给转向系统一个向右的阶跃输入,使得车辆向右偏离车道,且在车辆向左或向右偏离道路的过程中不干预车辆运动,通过车道保持算法主动纠正车辆的动作。
在车辆行驶的2s,车辆开始向左偏移,当车辆运动到5s时偏移接近到离车道边界线,车道保持系统开始起作用,主动控制车辆,经过约3s时间车辆回到道路中心线,然后沿车道中心线行驶。在车辆行驶12s的时候,给车辆向右的偏离量,偏移过程及车道保持系统的作用过程跟车辆向左偏离类似,此处不再具体讲述。
4.2 车道保持系统的鲁棒性验证
4.2.1 坡度对车道保持系统控制算法的影响
根据公路工程技术标准(JTG B01-2003)规定,二级公路(平原微丘区)设计时速60km/h的最大纵坡,应不大于6%,在本文中,取坡度为5%,其他条件不改变。
当道路坡度为5%时,直线路段的仿真结果与无坡度时直线段的仿真结果几乎一样,在2s时,车辆向左偏到5s偏移接近到离车道边界线,车道保持系统开始起作用,主动控制车辆,经过3s时间使得车辆回到道路中心线,然后沿着车道中心线行驶。行驶12s时,车辆向右偏离,当车辆运动到16s时偏移接近车道边界线,车道保持系统主动控制车辆,经过3s时间使得车辆回到道路中心线。因此认为坡度对车道保持控制算法准确度的影响不大。
4.2.2 车速及预瞄时间对车道保持系统控制算法的影响
在上文的研究中,车速都为72km/h,预瞄时间为0.8秒。在本节中,将验证在不同车速下车道保持系统的鲁棒性,并验证本文预瞄时间的准确性。
当预瞄时间为0.8s时,在不同速度下,车道保持控制系统都能及时响应,但随着速度增加,车辆回正时超调量增大,高速行驶时,车辆不能很好的跟随车道中心线行驶,会在车道中心线附近波动。
对比同一车速下不同预瞄时间车道保持系统的控制效果,预瞄时间越长,回正时间越大,车辆平顺性越好,且中低速时,预瞄时间长,控制效果更好,高速行驶时,预瞄时间短,控制效果更好。本文所采取的0.8s处于中间值,能较好的适应不同车速的需求,选择较为合理。
5 结论
本文设计了车道保持系统的模型框架,并在Carsim中完成搭建车辆模型、道路模型,在Simulink中完成搭建驾驶员模型、跨道时间算法模型,然后进行Carsim/Simulink联合仿真实验。实验结果证明,基于跨道时间算法和单点预瞄模型的车道保持系统基本能实现车道保持的功能,有利于减小车道偏离事故发生的概率。
参考文献
[1] Gonzalez-Mendoza M,Jammes B, Hernandez-Gress N,et al.A comparison of road departure warning systems on real driving conditions[C]//Intelligent Transportation Systems, 2014. Proceed -ings.The 7th International IEEE Conference on. 2004:349-354.
[2] 黄杨成.基于电动助力转向系统的车道偏离辅助系统的研究[D].合肥工业大学,2017.
[3] Mammar S,Glaser S, Netto M, et al. Time-to-line crossing and vehicle dynamics for lane departure avoidance. IEEE Intelligent Transportation Systems Conference, Washington, D.C.,USA, Octo -ber 36,2004.
[4] 郭孔輝.驾驶员-汽车闭环系统操纵运动的预瞄最优曲率模型[J].汽车工程,1984, (3):1-16.
猜你喜欢
动漫界·幼教365(小班)(2019年10期)2019-10-28
扬子江(2019年3期)2019-05-24
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中小企业管理与科技·中旬刊(2017年10期)2017-11-06
金点子生意(2016年7期)2016-04-09
小天使·四年级语数英综合(2011年4期)2011-06-30
故事家·风吟(2009年12期)2009-01-27
人民周刊(2009年12期)2009-01-25
