
基于工业大数据的柔性作业车间动态调度研究
2020-07-04 04:06康龙
科学与财富 2020年15期
关键词:调度
康龙

摘 要:随着工业进入信息化时代,工业大数据已成为新一轮产业革命的重要动力。工业大数据以工业系统的数据收集、特征分析为基础,对设备、装备的质量、生产效率、用戶体验以及产业链进行更有效的优化,并为未来的制造系统搭建无忧的环境。为使多目标柔性作业车间计划与调度的制定更适合实际生产的动态变化,提出增加动态反馈的闭环柔性作业车间计划模型及二阶式蚁群粒子群混合优化算法 TSAPO。通过增加动态监视功能,及时更新和反馈实际生产数据。利用对优化目标的二阶段分解,设计带有反馈机制的调度算法。实验结果证明,该算法在求解多目标柔性作业车间调度问题中具有较好的优化效果。
关键词:工业大数据;柔性作业车间;调度
当前,以大数据、云计算、移动物联网等为代表的新一轮科技革命席卷全球,正在构筑信息互通、资源共享、能力协同、开放合作的制造业新体系,极大扩展了制造业创新与发展空间。柔性作业车间动态调度问题已经得到广泛的研究。随着产品需求不断向个性化转变,制造工艺更加多样,实际调度问题也变得更加复杂,制造企业对车间调度问题的解决方法在实际可操作性、计算效率以及对车间扰动的实时响应能力等方面都提出了更高的要求。企业信息化数据是工业领域传统数据资产,也是工业大数据的第一个来源。为满足灵活多变的市场需求,柔性制造应运而生。柔性作业车间FJS计划与调度因适应新制造模式而成为为当前研究的热点。作业计划编制、生产调度、生产的监控是柔性作业车间中的最重要环节。
一、工业大数据的特征
工业大数据作为对工业相关要素的数字化描述和在赛博空间的映像,相对于其他类型大数据,工业大数据还具有反映工业逻辑的多模态、强关联新特征。多模态是指工业大数据必须反映工业系统的系统化特征及其各方面要素,包括工业领域中“光、机、电、液、气”等多学科、多专业信息化软件产生的不同种类的非结构化数据。强关联反映的是工业的系统性及其复杂动态关系,不是数据字段的关联,本质是指物理对象之间和过程的语义关联。包括产品部件之间的关联关系,生产过程的数据关联,产品生命周期设计、制造、服务等不同环节数据之间的关联以及在产品生命周期的统一阶段涉及的不同学科不同专业的数据关联。
二、柔性车间作业计划的动态模型设计
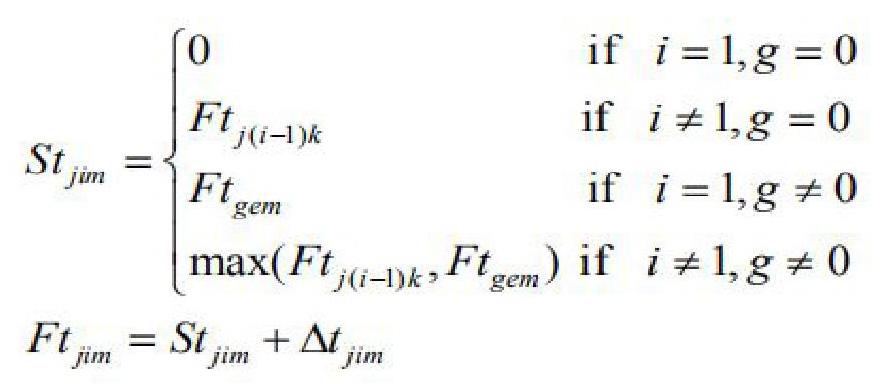
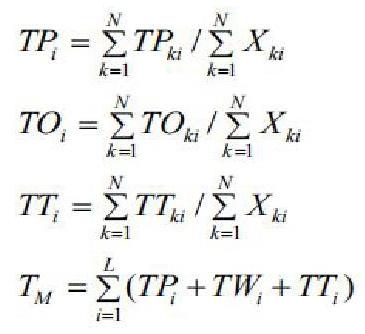
实际柔性生产中的加工生产因素多变,以预设固定加工信息为基础的作业计划与实际情况脱节。因此,在柔性车间作业计划模型中加入对当前生产实际情况的及时反馈很必要。通过增加生产信息的直接与间接反馈,设计了以车间作业计划编制为核心的闭环处理流程,计算动态值与生产反馈是对实际生产信息的动态监视。在此基础上提出包括工厂协调、作业计划编制和调度、监视功能的柔性作业车间计划模型,该模型中动态监视功能弥补了传统模型中监视功能只能进行信息简单反馈的不足,通过对动态值的计算完成对反馈数据的信息加工,并将其应用于生产数据的动态调整,是实现柔性加工制造动态适应加工变化的重要部分。动态值计算,动态监视环节中需要计算的动态值主要包括准备时间、加工时间、转移时间和加工周期等,分别如式所示。
三、基于 TSAPO 算法的柔性作业车间调度
在柔性车间作业计划模型中,调度部门根据作业计划完成作业调度。该环节所采用的调度算法对调度效果有明显影响。蚁群优化算法和粒子群优化算法是目前应用较广泛的调度算法,两者属于典型的基于仿生的群智能优化方法。蚁群优化算法具有正反馈、分布处理能力强的优点,但易陷入局部最优。粒子群优化算法具有计算简单、鲁棒性好的优点,但后期搜索精度不高。
1、优化目标及算法提出的理由。在多目标柔性作业车间调度中,制造周期最短、关键机器负载最小和总机器负载最小为最常见的优化目标。因此,采用对这目标进行加权优化的方法设计调度方案。优化目标函数如式所示,其中,F1(C)为制造周期;F2(C)为整体负载;F3(C)为关键机器负载。
在柔性作业车间调度问题中,主要解决“选择工艺路线”和“在既定工艺路线下的排产”这个问题。在式优化目标中,优化分量都与工序加工时间有密切关系。因此,采用分解的方法,提出二阶式蚁群粒子群混合优化算法。在第 1 阶段利用蚁群算法确定工艺路线,实现 F2(C)、F3(C) 优化目标;在第 2 阶段利用粒子群优化算法完成对既定工艺路线下的排产,实现目标 F1(C)的优化,并将每次迭代的排产结果评价反馈给第 1 阶段,将其作为蚁群信息素更新的主要依据,引导下次迭代中蚂蚁对工艺路线的选择,以提高优化效果。
2、TSAPO 算法设计。TSAPO 的基本框架设计。根据 Step3 的初始调度序列进行粒子向量解码;用传统粒子群优化算法生成约定工艺路线下的调度方案,计算该方案的优化目标函数。 Step5 计算动态值,更新蚁群信息素浓度及调度方案,蚂蚁数量加 1,转 Step3 。Step6 输出调度结果。TSAPO 算法的说明如下:在 Step3 ,为体现蚂蚁在构造路径过程中对关键机器负载与加工机器总负载最小目标的关注,蚂蚁状态转移规则与转移概率分别按式设计。伴随路径的构造,当前负载大且加工时间长的机器被选中的概率变小,加工负载得以均衡。
3、算法验证实验。采用工序的 8×8 问题标准算例进行TSAPO 算法有效性验证。在实验过程中,信息素挥发度ρ、信息启发式因子α和能见度启发式因子 β等参数对算法性能影响明显。其中,ρ反映了路径上信息素挥发的速度,ρ过大会影响算法的全局搜索能力,ρ过小则会降低算法的收敛速度;α反映了在算法中蚁群根据信息素搜索路径的重要程度;能见度启发式因子β反映在算法中蚁群根据路径的能见度搜索路径的重要程度。α和β过大时,算法的正反馈作用过分突出,算法会出现过早收敛现象,若问题规模较大,则最终获得的解很有可能是局部最优解;α和β过小时,蚂蚁对路径上的信息素浓度和路径的可见度都不给予充分的重视,进行无休止的随机搜索(不停滞),这同样会影响算法对最优解的获得。TSAPO 算法与文献[9-10]算法获得实验结果比较,数据显示,在求解该问题时,TSAPO 算法获得的解分量 F1(C)为 15,与算法 Approach by Localization 相同;F3(C)值为 12,小于算法 Temporal Decomposition 与算法 Approach by Localization。TSAPO 算法的优化目标函数值为 26.1,是所有算法中最小的。
作业车间计划模型与其调度算法是影响加工制造效率与成本的重要环节。本文改进传统计划模型,增加生产数据的动态反馈机制能够使作业计划的制定更科学、更符合实际生产需要。基于模型,增加生产数据的动态反馈机制能够使作业计划的制定更科学、更符合实际生产需要。在科学的作业计划之下,通过分解制造周期、整体负载及关键机器负载等最常见优化目标,对蚁群优化算法与粒子群优化算法加以融合,提出具有反馈机制的二阶式蚁群粒子群优化算法进行问题求解。实验结果证明,本文的TSAPO 算法能够克服单一算法在求解多目标柔性作业车间调度问题。
参考文献:
[1]孔 霖,苏健军. 某压力传感器热冲击响应的抑制方法[J]. 传感器与微系统,2018,2( 12) : 69 - 73.
[2] 李丽萍,孔德仁,苏健军. 毁伤工况条件下冲击波压力电测法综述[J]. 爆破,2019( 2) .
[3] 郭炜,俞统昌,李正来. 冲击波压力传感器灵敏度的动态校准[J]. 火炸药学报,2017,29( 3) .
猜你喜欢
中国交通信息化(2021年4期)2021-07-21
铁道通信信号(2020年10期)2020-02-07
电子制作(2019年20期)2019-12-04
北京航空航天大学学报(2019年9期)2019-10-26
成都信息工程大学学报(2019年3期)2019-09-25
三门峡职业技术学院学报(2019年1期)2019-06-27
铁道通信信号(2018年2期)2018-04-18
通信电源技术(2016年6期)2016-04-20
云南电力技术(2015年2期)2015-08-23
河南科技(2014年24期)2014-02-27
