
基于欧拉角与微元分析的六自由度机械平台运动模型
2020-07-04 04:27胡璠樊
机电信息 2020年14期
摘要:对六自由度机械平台的运动进行了研究,引入欧拉角描述平台的运动姿态和方向,将抽象的运动用具体的数值组合进行量化,并结合旋转矩阵建立动态欧拉角模型。取ZYX的欧拉角组合进行实例演算,给出了支杆长度随位移变化和倾角变化的关系图像。
关键词:机械平台;动态欧拉角模型;旋转矩阵
1 问题重述
六自由度机械平台由6根带伺服电动缸(或液压装置)的支杆、上下2个平台以及上下各6只万向节(或球面副)组成。下平台固定在基础设施上,通过6根支杆的伸缩运动,控制上平台在空间6个自由度运动,即三维空间的X、Y、Z轴方向的运动以及分别绕X、Y、Z轴旋转的运动。
通过驱动支杆伸缩运动,六自由度机械平台可以实现上平台姿态变化。该机械平台具有并联结构,即6个驱动器共同作用于一个平台。这种设计优化了系统刚度,承载能力强,且位置误差不累计,但相较于串联设计,其驱动方式也更为复杂。我们假设上平台在初始状态下与下平台平行,通过对该机械平台做适当的简化和假设,建立数学模型,在保持上平台初始中心位置不变的情况下,能给出平台向任意方向倾斜某一角度时6根支杆的长度随倾角变化情况。
2 问题分析
在上平台初始中心位置不变的情况下,六自由度机械平台进行任意角度的倾斜,于是我们以上平台初始中心位置为原点建立空间直角坐标系。引入欧拉角模型,通过旋转矩阵计算,描述上平台向任意方向倾斜某一角度时6根支杆的长度随倾角变化的情况。
3 模型假设
(1)假设上下平面短边所对的圆心角的度数相同。
(2)假设上平面中心质点在平移时做匀速直线运动。
(3)假设上平台绕不同轴转动的角速度相同。
4 模型建立
4.1 六自由度机械平台的结构及参数
首先,我们将模型简化成一个圆台,运动上平台的6个万向节位于半径为ra的圆周上,6个万向节与上平台的交点记为Ai(i=1,2,…,6),在圆周上均匀分布;运动下平台的6个万向节位于半径为rb的圆周上,将其与下平台的交点记为Bi(i=1,2,…,6),在圆周上均匀分布。选取坐标系OXYZ的坐标原点为上平台外接圆圆心,并固定在上平台上。运动平台的初始高度(上下平台间的垂直距离)为h。
4.2 欧拉角的引入
由于欧拉角非常适用于描述物体的姿态和方向,故在此利用欧拉角讨论支杆的长度随倾角变化的情况。
平台向任意方向倾斜某一角度可以分解为3个过程:先绕某一轴旋转γ角,再绕某一轴旋转β角,最后绕某一轴旋转α角。因此,我们引入欧拉角动态模型。
转动的排列顺序不同就有不同的欧拉组合。其中,最具代表性的是ZYX与ZYZ,在此我们选用ZYX组合。
5 模型求解
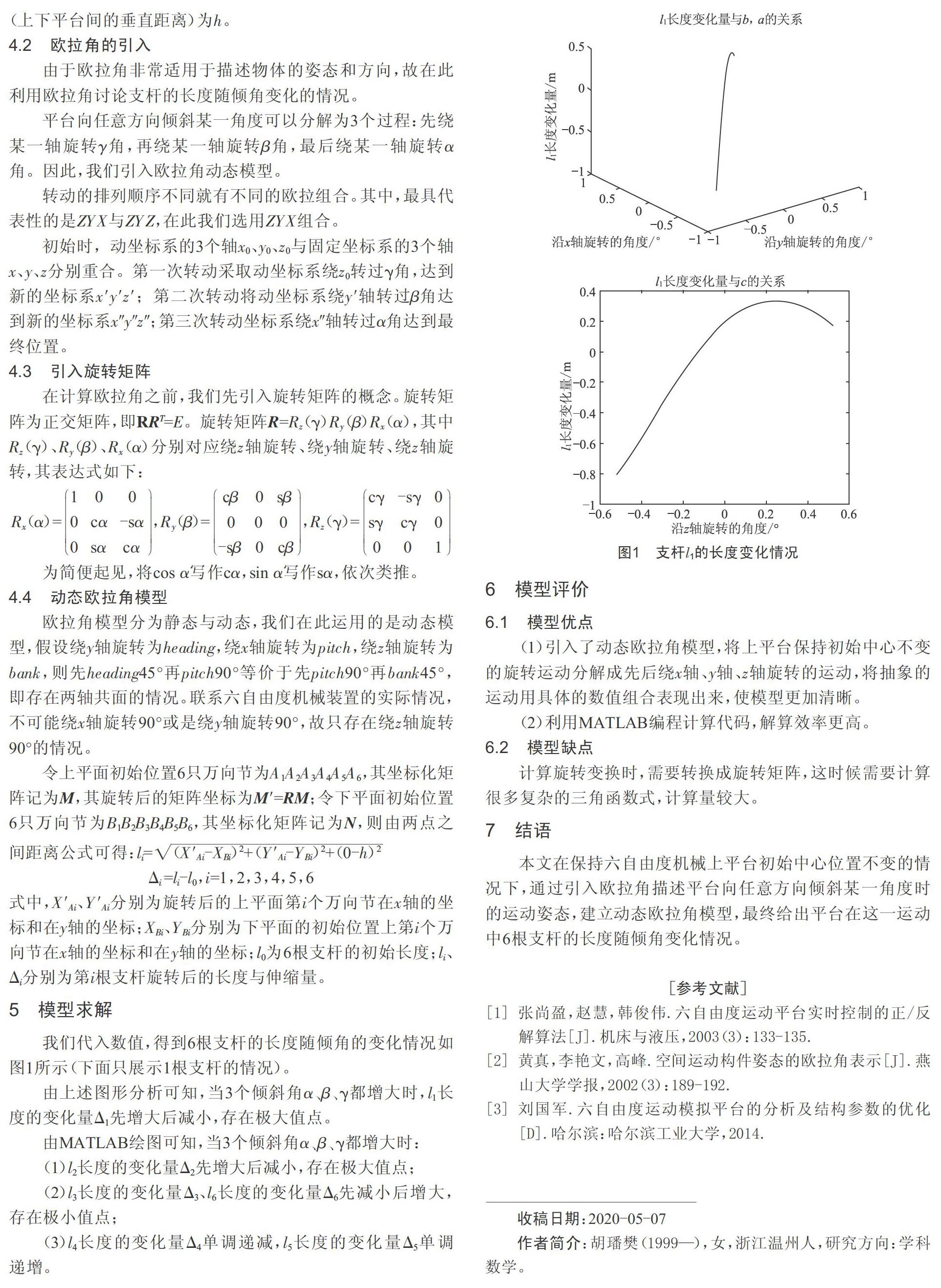
我们代入数值,得到6根支杆的长度随倾角的变化情况如图1所示(下面只展示1根支杆的情况)。
由上述图形分析可知,当3个倾斜角α、β、γ都增大时,l1长度的变化量Δ1先增大后减小,存在极大值点。
由MATLAB绘图可知,当3个倾斜角α、β、γ都增大时:
(1)l2长度的变化量Δ2先增大后减小,存在极大值点;
(2)l3长度的变化量Δ3、l6长度的变化量Δ6先减小后增大,存在极小值点;
(3)l4长度的变化量Δ4单调递减,l5长度的变化量Δ5单调递增。
6 模型评价
6.1 模型优点
(1)引入了动态欧拉角模型,将上平台保持初始中心不变的旋转运动分解成先后绕x轴、y轴、z轴旋转的运动,将抽象的运动用具体的数值组合表现出来,使模型更加清晰。
(2)利用MATLAB编程计算代码,解算效率更高。
6.2 模型缺点
计算旋转变换时,需要转换成旋转矩阵,这时候需要计算很多复杂的三角函数式,计算量较大。
7 结语
本文在保持六自由度机械上平台初始中心位置不变的情况下,通过引入欧拉角描述平台向任意方向倾斜某一角度时的运动姿态,建立动态欧拉角模型,最终给出平台在这一运动中6根支杆的长度随倾角变化情况。
[参考文献]
[1] 张尚盈,赵慧,韩俊伟.六自由度运动平台实时控制的正/反解算法[J].机床与液压,2003(3):133-135.
[2] 黄真,李艳文,高峰.空间运动构件姿态的欧拉角表示[J].燕山大学学报,2002(3):189-192.
[3] 劉国军.六自由度运动模拟平台的分析及结构参数的优化[D].哈尔滨:哈尔滨工业大学,2014.
收稿日期:2020-05-07
作者简介:胡璠樊(1999—),女,浙江温州人,研究方向:学科数学。
