办公区资料运输机器人研制
2020-07-07 03:33谢智阳刘锦滔叶永玖陈纪钦
广东交通职业技术学院学报 2020年2期
谢智阳,刘锦滔,叶永玖,陈纪钦
(1.河源职业技术学院,广东河源517000;2.河源市工业机器人技术应用工程技术研究中心,广东河源517000)
随着我国机器人市场的不断扩大,尤其是2013年跃居全球首位以来,越来越多的企业参与其中,并取得了不俗的成绩,国产机器人的市场份额也在不断地扩大。如今市面上诞生了各种各样的机器人,如自动航材运输机器、物料搬运机器人和运输对抗机器人[1-4],这些机器人都在各自扮演着自己角色,释放人工劳动力。
在现代大型办公区域里公司人员密集,每天都有许多资料需要交到各个部门手中,然而办公时每个职员都处于忙碌状态,甚至没有多余时间去交各种资料,这样难免会出现文件迟交、漏交的问题,导致降低办公效率。针对这种现象,本文设计了办公区资料运输机器人装置,通过办公区资料运输机器人,将资料输送到所需要资料的人手中,提高办公室自动化、智能化,降低人力资源成本,提高工作效率。
1 机械结构设计
1.1 总体结构布局
办公区资料运输机器人主要由底盘、主控台、信号接收装置、语音播放系统、显示屏、资料放置区和超声波探头等部件构成,见图1所示。除基本部件之外,机器人还设计了资料放置区、纵向资料放置区和控制箱。
1.2 底盘结构设计
地盘部分是小车的核心结构,承载着机器人自动循迹的任务,主要包含导航模块[5-6]、从动万向轮、霍尔编码器、主动轮、电机、RC522模块[7]等部件构成的,各模块的安装位置见图2所示。
2 硬件电路设计
2.1 硬件搭建设计思路

图1 办公区资料运输机器人结构示意
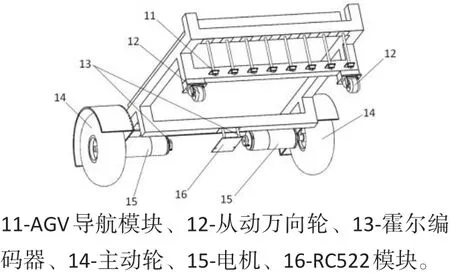
图2 底盘结构示意

图3 硬件搭建构思
本文是以循迹智能小车为基础,加以改进、创新、实践构建设计思路。通过单片机技术、无线技术和传感器技术的整合。使机器人根据其指令自动到达指定区域,将文件送达。硬件搭建结构思路见图3所示。
控制架构主要由主控台、信号通讯模块、动力驱动模块、RFID标志识别模块和人机界面组成。
信号接收及语音系统中的结构图是由NRF24L01+PA+LNA无线模块、喇叭、天线、语音模块等部件构成。控制台设由人机界面、LCD12864液晶屏显示模块和3*5矩阵键盘等部件构成。
在制作办公区资料运输机器人的硬件设计的过程中,根据作品的组成和功能,确定作品所需的材料见表1所示。

表1 办公区资料运输机器人制作材料
2.2 呼叫装置及语音系统
如图4所示,呼叫装置及语音系统由NRF24L01+PA+LNA无线模块、喇叭、天线和语音模块等部件构成,NRF24L01+PA+LNA模块是普通NRF24L01模块的增强版,采用2.4 G频段进行通信[8-12],通信距离最远可达1 000 m,经调查,一般楼层的办公半径不会超过100 m,能较好的满足本文的设计需求。

图4 呼叫装置及语音系统的结构示意
3 控制软件设计
3.1 软件设计思路
在硬件搭建好的基础上,进行软件设计,如图5所示,为本文机器人的模拟场地。首先,机器人启动后处于待命状态,随时待命NRF24L01无线模块的呼叫,当被呼叫时,主控开源硬件Arduino会识别出是哪个房间的无线信号,并且自动匹配对应的该房间RFID地标ID号,机器人会从待命区A点出发。例如,假设现有103房间呼叫,则机器人需从A点出发,经过B点、D点、F点、H点、J点、L点到达M点,完成地标识别,解决了机器人在路口选择从哪继续前进的问题。

图5 模拟场地图
到达目的地后,资料放置在机器人上的资料放置柜,按下需要送去的对应房间号并按下确认键,机器人开始继续工作,送达到目的地。例如:在103房间,想让机器人运输资料到106,那么就在矩阵键盘按下106并确认,机器人主控则会自动匹配到目的地E点,机器人则会从M点出发,需经过L、J、H、F、D点,最终到达E点,送达资料。机器人到达资料送至目的地后,机器人返回待命区A点。
3.2 办公区资料运输机器人的总体软件设计
根据模拟场地的要求,设计总体控制流程,见图6。在循迹部分中的程序,因设定的黑线宽度为30 mm,五路循迹模块对射管相距25 mm,所以,本文把遇到的情况分为9种情况,分别是对射管1遇到黑线,对射管1和2遇到黑线,对射管2遇到黑线,对射管2和3遇到黑线,对射管3遇到黑线,对射管3和4遇到黑线,对射管4遇到黑线,对射管4和5遇到黑线,对射管5遇到黑线,共9种情况。详细的分为9种情况,更有利于为机器人行驶做更好的误差计算。

图6 总体流程
RC522与Arduino UNO连接,五路循迹模块、NRF24L01+模块与Arduino 2560连接,当UNO连接的RC522识别到地标后,通过串口通信实时发送给Arduino 2560,既解决了2560 SPI通信接口不足的问题,也有效分担了Arduino 2560的计算任务,保证系统的实时性。
本文运用Arduino UNO处理地标识别任务,Arduino 2560处理路径识别、人机界面、通信、电机驱动等任务,当UNO识别到地标后,会通过串口通信传送给Arduino 2560,由Arduino 2560执行操控任务。
NRF24L01+与Arduino UNO组合成的呼叫装置,本文设计成十对一的收发配置,十发一收,十一个NRF24L01+同频段,同地址,但发送的ID内容不同,这就能轻易的辨别出每一个的呼叫装置。
3.3 路径规划
如图7,假设102房间呼叫运输机器人,机器人在A点接收到ID为102的无线信号,则机器人从A点出发,行驶途中,RC522地标识别模块一直处于检测状态,经过B、D、F点,检测到达H点的时候,机器人停下,并向左转弯。驶入102房间,当地标识别模块检测到I点的时候,机器人停止。
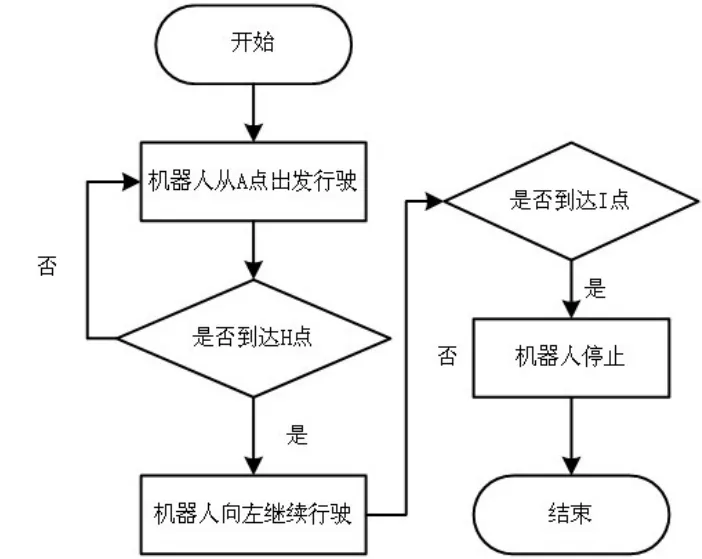
图7 102房间呼叫路径规划流程
资料放置后,如想送至101房间,则在矩阵键盘按下101密码。机器人在I点出发,行驶途中,RC522地标识别模块一直处于检测状态,当检测到H点时,机器人向右转弯并继续行驶,当行驶到B点时机器人停下,并向右转弯。驶入101房间,当地标识别模块检测到C点的时候,机器人停止,资料送达目的地,见图8。

图8 102送至101房间路径规划流程
4 实验测试
4.1 实验环境
实验样机如图9所示,实验地点为河源职业技术学院机电工程学院四楼,根据图5的模拟场地布置实验所需的实验环境。机器人系统采用开源硬件对系统实施控制,Arduino 2560、Arduino UNO板数字输出端子带有PWM功能,结合本文设计的路径规划算法和PID循迹算法对机器人进行实验测试。

图9 办公区资料运输机器人实物图
4.2 机器人定位实验
本文采用RC522模块对地理位置的识别定位,对比与其它的定位模块,识别精度高,性价比高,且利于安装;为研究机器人的在节点处的重复定位情况,对机器人进行定位测试,在进行100次的定位测试中,机器人在节点处的平均重复定位精度达±0.85 cm,符合该机器人运行环境的要求。
4.3 机器人无线呼叫实验
影响机器人稳定性另一个重要功能是机器人的无线通信系统,本文采用NRF24L01+PA+LNA无线模块作为信号的发射与接收,该模块信号传输距离远、信号强、体积小、功耗小、自带频道功能,不易受干扰,非常适合与控制器连接组装成呼叫系统。为测试无线系统的稳定性,进行了100次的无线呼叫测试,每个节点各呼叫10次,一次性准确呼叫98次,失误2次,通信成功率达98%。
5 结论
本文基于Arduino 2560和Arduino UNO控制器巧妙的实现了办公资料运输机器人所需的功能,整套系统架构合理,成本低廉,解决了办公资料人工传送效率低的问题,让办公区域的文件资料传输更加便捷,大大提高了办公室的办公效率。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
建材发展导向(2022年5期)2022-04-18
少年文艺·我爱写作文(2020年11期)2020-11-23
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
华人时刊(2019年2期)2019-03-22
饮食与健康·下旬刊(2017年12期)2017-12-06
电子制作(2017年1期)2017-05-17
少年文艺·我爱写作文(2016年9期)2016-05-14
通信电源技术(2016年3期)2016-03-26
初中生之友·中旬刊(2015年10期)2015-11-03