
基于动网格与UDF技术的流量开关仿真设计
2020-07-13 03:10张发年于延凯郭建华朱兴华
仪表技术与传感器 2020年6期
张发年,于延凯,郭建华,朱兴华
(中国科学院沈阳自动化研究所,辽宁沈阳 110016)
0 引言
油电混合动力海洋机器人航程远、补给方便,是很有发展前途的海洋机器人[1],其进排气系统中设计有疏水管路,用于疏排进入进排气管道内的海水[2]。流量开关作为监测排水泵运行状态的主要传感器和作为判断积水是否排尽的依据,其性能对进排气系统可靠性影响巨大[3]。常规流量开关如电磁式、超声波式、电容式、压力式等技术应用比较成熟[4-9],但使用场合各有侧重,并且在海洋机器人疏水的复杂工况下,仍然存在诸多问题。
某油电混合动力海洋机器人疏水管路用流量开关,因疏水管路与柴油机排气管路连通,受柴油机尾气(烟雾)、积炭及海水腐蚀等影响,常规流量开关易损坏且常发生误报。同时,排水水量不定,受平台在海浪作用下而摇晃等因素影响,导致排水泵吸水口吸水流量不稳,启泵初始和排水结束时管路中以气液混合物为主,排水压力波动严重,难以实现有效检测。因此,研制一种抗污染、耐腐蚀,适应非稳定流的流量检测开关具有重要意义。
文中设计了一种干簧管流量开关,基于数值仿真软件Fluent提供的计算方法和物理模型,利用动网格和UDF技术(用户自定义函数),研究了流量开关阀瓣在不同含气率条件下的运动特性,并通过试验验证了数值模拟的正确性,为海洋机器人排水自动化提供了技术支撑。
1 流量开关工作原理及研究工况
1.1 流量开关工作原理
如图1所示,为流量开关结构图。流量开关利用干簧管的磁耦合特性,在遇到强磁场时吸合导通输出开关量信号。将磁钢固定在阀瓣上,具有一定压力的水通过流量开关时磁性阀瓣被冲击上浮至干簧管附近位置,干簧管由常开状态转为闭合状态,检测电路导通,输出信号。相反,在流量不足或是无水通过流量开关时,磁性阀瓣会在重力作用下恢复至底部阀座位置,干簧管将再次处于常开状态,检测电路断开,输出相反信号,图中箭头所示为水流方向。
1.2 研究工况
水箱摇晃导致排水泵吸空或排水初期及结束阶段,排水管路含有大量气体引起排水泵压力和流量不稳,如图2所示,为某次排水监测排水泵出口压力变化时序图。排水泵自吸阶段因管路中有水,压力相对稳定,但随后在排水初始阶段因吸水不顺利,压力开始无规律波动,当流量稳定后压力重新处于稳定状态,但随着水箱水量减少,压力再次出现波动。为准确预报非稳定流条件下的流量信息,防止排水泵长时间空转,要求流量开关及时、准确地反馈管路流量信息。

图1 流量开关结构图

图2 某次排水泵排水压力时序图
2 数值模拟
2.1 动力学模型
采用动网格技术模拟活塞运动,利用Fluent软件的UDF技术编写宏函数(DEFINE_CG_MOTION),通过记录当前阀瓣的位置,同时对阀瓣Z轴方向受到的流体压力进行积分,得到阀瓣受到的流体作用力。动网格运动控制方程如式(1)所示,依据式(1)编写阀瓣运动的UDF函数,编写后的UDF文件通过编译实现与Fluent的连接。
(1)
式中:m为阀瓣质量,kg;f为阀瓣受到的摩擦力,N,此处忽略不计;mg为阀瓣受到的重力,N;F为水对阀瓣的作用力,N是流体压力p对阀瓣面积的积分,F=∑pA。
选取多相流模型VOF湍流模型[11]作为主要模型进行数值模拟。VOF方法是一种描述两相流复杂自由表面的数学模型,其基本思路是计算域内水和气的体积分数之和为1。
2.2 动网格技术
动网格计算模型模拟由于流域边界运动引起流域形状随时间发生变化的流动情况。对于通量φ,控制V内的守恒方程式为

(2)
式中:ρ为液体的密度,kg/m3;u为液位的速度矢量;us为动网格的网格变形速度;Γ为扩散系数;A为控制体表面积;Sφ为通量φ的源项;∂V为控制体V的边界。
文中将阀瓣作为刚体处理,网格采用四面体网格,选择弹簧光顺和网格重构方式更新网格。
2.3 边界条件及求解设置
仿真试验入口边界条件以全面试验方法确定。因素A即流速有3个水平,分别是A1=0.5 m/s,A2=1.0 m/s,A3=1.5 m/s;因素B即含气率有6个水平,分别是B1=80%,B2=70%,B3=60%,B4=50%,B5=40%,B6=20%。出口边界条件选择压力出口,出口为标准大气压,相对压力为0。流体水的密度为998 kg/m3,水气混合状态参考选择空气密度1.225 kg/m3。水气混合物相互作用模型选择VOF模型,采用有限体积法求解,压力项采用标准格式离散,其余项都用一阶迎风格式离散,压力速度耦合方式SIMPLE算法求解。
3 计算结果与分析
3.1 含气率对阀瓣平衡位置的影响
阀瓣平衡位置随着含气率的增大呈明显下降趋势,同时混合物流速对阀瓣影响较含气率明显,随着混合物流速的增大,阀瓣平衡位置增加更明显。如图3所示为不同流速时阀瓣平衡位置与含气率的关系曲线。阀瓣平衡位置受含气率影响主要原因是气体密度小,同样流速时产生的冲击力要小于水,而流速对阀瓣平衡位置的影响明显主要是因为流速提高后入口质量流量增加,阀瓣受到的流体作用力明显增加,这一点从仿真获得的阀瓣受到的压强可得到证实。

图3 含气率大于50%时阀瓣位移与流速的关系
3.2 阀瓣的运动特性
从仿真结果可知,阀瓣在气水混合物的作用下运动特点与含气率有明显关系,当含气率大于70%时,阀瓣的运动较微弱,特别是流速较小时,阀瓣存在明显的冲击震荡,阀瓣在达到一定高度后会再次下落,随后在较低位置达到稳定,如图4所示为含气为率80%、流速为1.0 m/s阀瓣运动曲线,其对应的压力云图如图5所示,图中提取起始时刻、0.015 s、0.025 s、0.035 s、0.045 s、0.055 s、0.065 s、0.075 s、0.085 s、0.1 s共10个时刻对应阀瓣的压力云图,图中阀瓣在0.035 s时达到最大位移,之后在0.085 s回落至最低点。阀瓣发生震荡是因为阀瓣在初始时刻主要受到空气作用,随着空气的不断积聚,阀瓣受到空气作用力越来越大,直到克服阀瓣质量阀瓣开始上升,阀瓣被打开,空气又迅速膨胀逸出,阀瓣受到的作用力迅速减小,阀瓣在自身重力作用下回落,直至阀瓣即将关闭时空气再次积聚使阀瓣反复,直至阀瓣质量与流体作用力平衡,也即两相流动态不稳定现象导致的结果[12]。
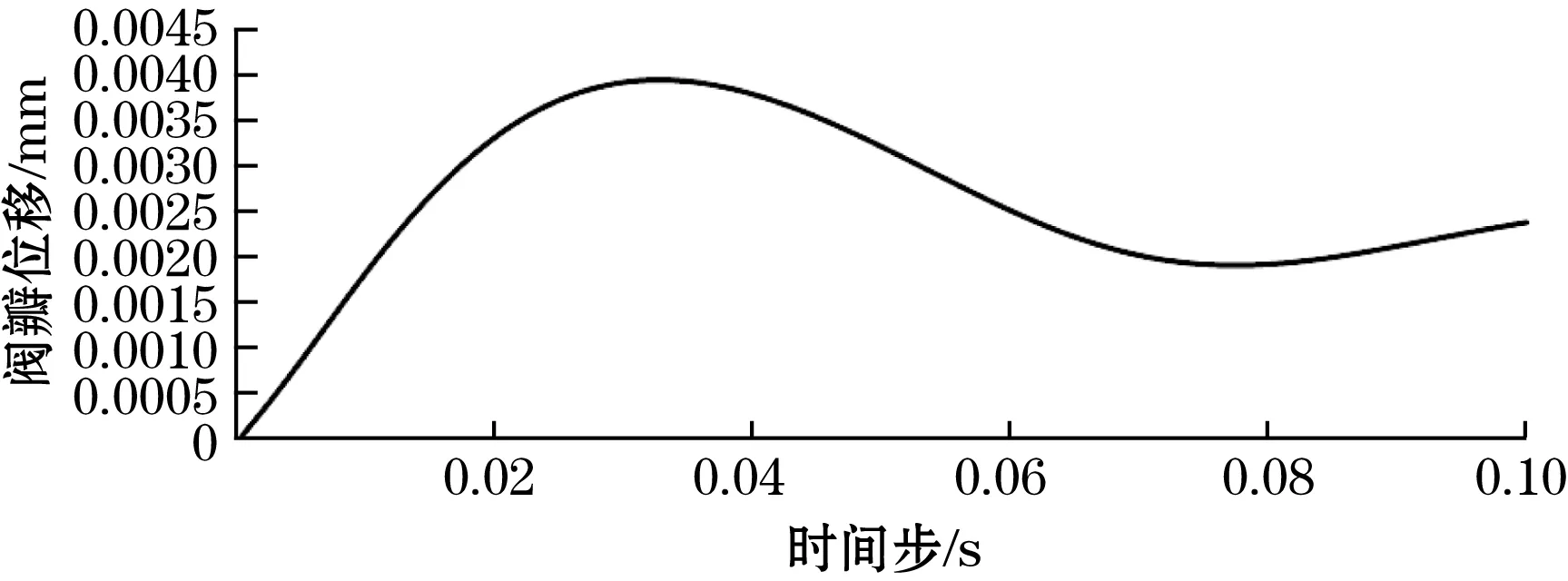
图4 含气率80%流速1.0 m/s阀瓣运动曲线

(a)起始时刻 (b)0.015 s (c)0.025 s (d)0.035 s (e)0.045 s

(f)0.055 s (g)0.065 s (h)0.075 s (i)0.085 s (j)0.1 s图5 含气率80%流速1.0 m/s时流量开关压力云图
4 试验验证
4.1 试验装置及方法
流量开关尺寸参考DN32阀门设计,通径为32 mm,高70 mm,外径为65 mm,采用对夹式装配方式安装在两片DN32法兰之间。流量开关控制硬件包括以AVR单片机(ATmega1280)为核心的微控制器、调制电路、干簧管及上位机,软件采用C语言编程。在调制电路中,流量开关反馈低电平通过反门器GSG54HC14转化为高电平,输出至数字量隔离芯片ADUM1510,经过隔离后输出至数字量扩展芯片MAX7301,通过SPI串口与单片机的SPI串口相连,进行信息交互。
如图6所示为试验原理图。试验采用自吸泵从水箱经入水管吸水,经过球阀1、流量开关、球阀2后至水箱2,直至水箱1水被排尽,模拟泵疏水全过程重复3次。在流量开关下游安装有压力计通过调节球阀控制流过流量开关的流量。采用控制器采集并处理流量开关信号、压力计及流量计信号,通过CAN总线转USB传至计算机(代替上位机)保存。

图6 流量开关结构图
为更好地观察阀瓣在水流作用下的运动状态及阀瓣位置与控制器采集信号的一致性,流量开关主体采用透明度大于90%的亚克力材料制成。
4.2 试验结果与分析
如图7所示,为流量开关工作状态,从图7中可以很清楚观察到阀瓣的状态,阀瓣在水流作用下浮起,整个试验过程中,流量开关状态与上位机采集的信号始终一致。

图7 流量开关工作状态
试验中管路流量及流量开关信号时序曲线如图8所示,依次设置管路出口流量0.85 m3/h,2.40 m3/h,4.70 m3/h(以上流量对应球阀开启1/3、2/3和全开)。以流量计流量显示稳定后为界限,对应时刻和试验现象在图中分别标记出排水过程的3个阶段,即排水起始阶段、稳定排水阶段和排水结束。
图8(a)设置出口流量0.85 m3/h,由图8可知,排水起始阶段随着流量逐渐增大,流量计显示管路流量在0.2~0.4 m3/h之间波动,此时流量开关输出0,而稳定排水阶段,流量虽有小幅波动,但流量开关信号始终保持稳定,流量开关持续输出高电平;排水结束阶段流量再次出现波动,但流量开关保持低电平无动作。
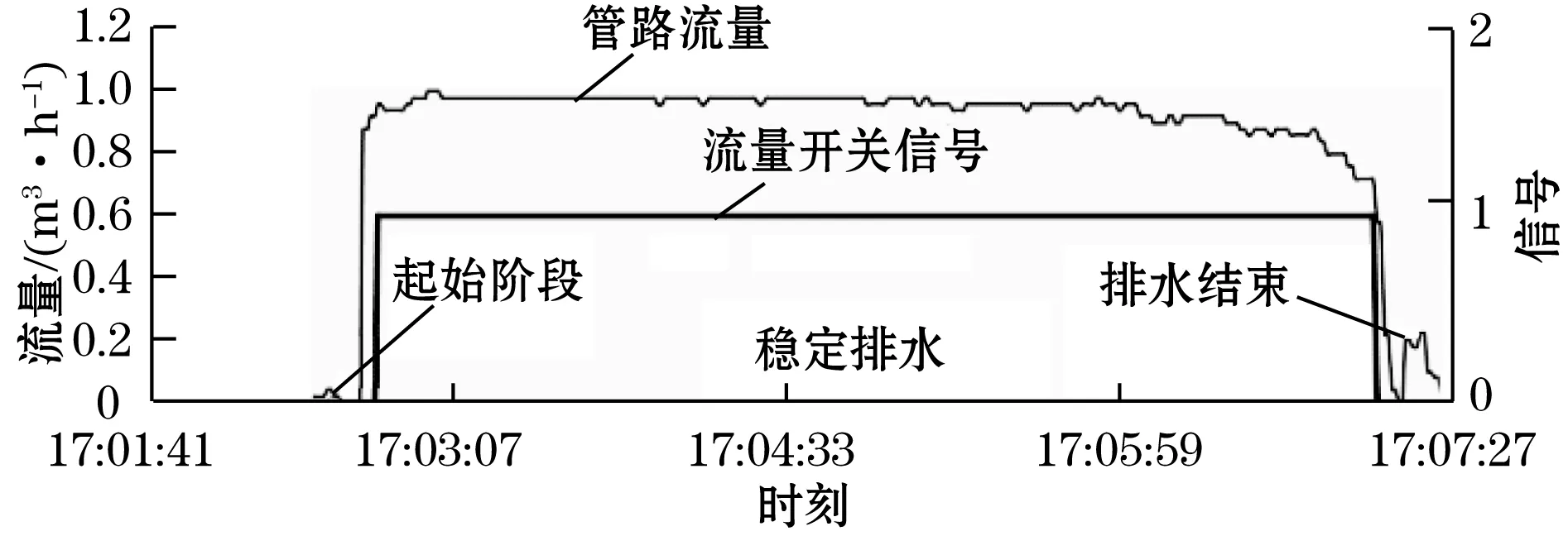
(a)出口流量0.85 m3/h
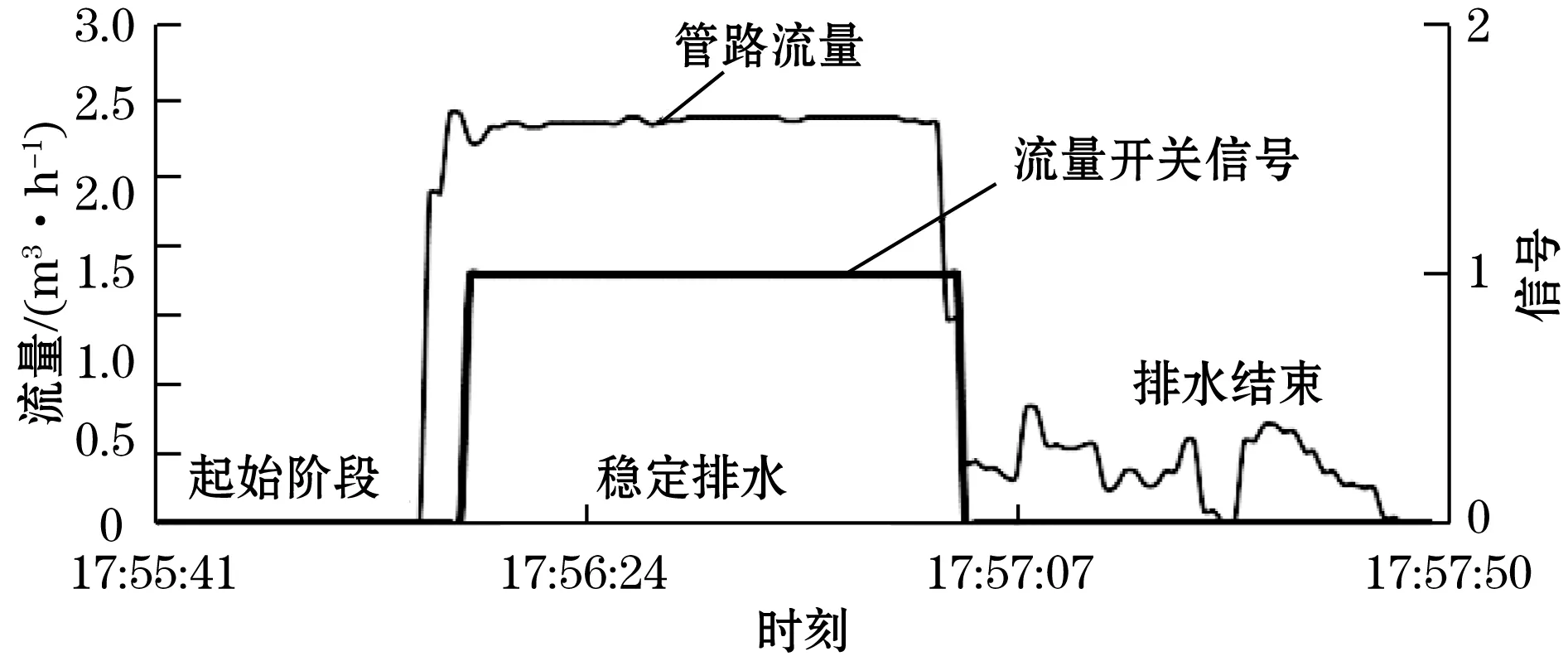
(b)出口流量2.40 m3/h

(c)出口流量4.70 m3/h图8 管路压力、流量及流量开关时序图
图8(b)设置出口流量2.40 m3/h,由图可知,排水起始阶段流量上升速度较快,流量开关信号有少许延迟,随后进入稳定排水阶段后,流量开关在管路达到最大流量时持续输出高电平,排水结束阶段,流量在0~0.5 m3/h之间波动,此过程中流量由2.40 m3/h迅速降至0.5 m3/h以下,流量开关输出低电平后未动作。
图8(c)设置出口流量4.70 m3/h,由图可知,流量开关在流量达到3.0 m3/h时输出高电平信号,随后流量持续增加至5.0 m3/h,进入稳定排水阶段,在排水起始阶段流量波动最大达到1.0 m3/h,但流量开关并未
发生动作,排水结束时出水管流量在1.0 m3/h以下波动,流量开关后续未发生动作。
由试验可知,阀瓣出现波动均发生在含气率较高的排水初始状态和排水结束状态,流量开关下游中出现大量气泡逸出现象,此时,即使流量计显示流量高达1.0 m3/h,流量开关依然持续输出低电平信号,这也验证了仿真结果,高含气率阀瓣波动现象,与文献[12]中两相流动态不稳定现象相符。流量开关在区分排水的3种状态时表现出很好的鲁棒性,这是因为流量开关利用了两相流动态的不稳定性,其结构设计采用直立式止回阀结构,气体顶开阀瓣的一瞬间迅速扩散,压力变小,气液混合物密度降低,阀瓣受到的作用力迅速下降,阀瓣下降,干簧管断开,检测电路断开,但流量开关在流量的预报过程中也出现了延迟现象,主要是受信号检测原理影响,阀瓣只有达到指定位置后才能输出信号,相比流量计显示慢。试验中还发现,在自吸泵吸水和排水结束时,气体的快速逸出导致管路中压力计显示的数值不稳定,同时造成流量计出现瞬时流量波动,故此时流量计显示流量波动高达1.0 m3/h,只是空气扩散导致的瞬时值。
5 结论
本文设计了一种适用于非稳定流排水工况的干簧管流量开关,采用动网格技术分析了流量开关阀瓣在不同含气率条件下的运动特性,并通过试验验证了流量开关实际工作情况,结果表明试验结果与仿真结果一致,该流量开关对疏水全过程匹配较好,研究为混合动力海洋机器人进排气系统疏水检测提供了技术支撑。参考文献:
[1] 蒋新松,封锡盛,王棣棠.水下机器人[M].沈阳:辽宁科学技术出版社,2000.
[2] 于延凯,胡志强,刘大勇.一种海洋机器人用进排气装置和方法:201310626714.9[P].2013-11-28.
[3] 杨翊,朱兴华,胡志强,等.水下机器人柴电动力系统可靠性研究[J].失效分析与预防,2017,12(2):87-93.
[4] 胡俭波,宋开臣.一种高性能超低功耗流量计设计[J].工业控制计算机,2002,15(1):57-68.
[5] 严锦洲,蒋念平.新型超声波流量计[J].仪表技术与传感器,2014(4):28-30.
[6] 朱栢荣.临时高压消防给水系统流量开关启动流量设定取值探讨[J].给水排水,2016,42(5):140-144.
[7] 彭珍瑞,卢海林.电容式靶式流量计的研究与仿真[J].仪表技术与传感器,2013(3):40-43.
[8] 曹建生,刘昌明,张万军.简易翻斗式自记流量计的制作及其应用[J].现代科学仪器,2005(5):40-44.
[9] 汪余景,翟军勇.基于恒温差的热式空气流量计[J].仪表技术与传感器,2017(6):41-43.
[9] 魏朋飞,沈昱明,张小庆.基于恒电流的质量流量开关设计[J].化工自动化及仪表,2016,44(6):611-613.
[10] 孙新新,翟媛媛,常莹.基于多普勒原理的管道流量测量系统的设计[J].仪表技术与传感器,2013(7):92-98.
[11] 李其修,刘辉,吴向君.基于CFD的潜艇高压气吹除主压载水舱系统模拟[J].舰船科学与技术,2012(9):56-60.
[12] 王经.气液两相流动态特性的研究[M].上海:上海交通大学出版社,2012.
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
化工设备与管道(2022年1期)2022-06-08
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
化工机械(2022年1期)2022-03-21
科学与信息化(2021年23期)2021-09-16
大众科学(2020年7期)2020-10-26
民用飞机设计与研究(2020年1期)2020-05-21
山西冶金(2019年2期)2019-05-31
小天使·六年级语数英综合(2018年1期)2018-10-08
