大直径柔性整流罩垂直对接平台的设计与验证
2020-07-14 09:49张骏刘玉梅刘贝周煦洁陈艳
机械工程师 2020年6期
张骏,刘玉梅,刘贝,周煦洁,陈艳
(上海航天设备制造总厂有限公司,上海200245)
0 引 言
火箭整流罩用于保护卫星及其他有效载荷,防止卫星受到气动力、气动热及声振等有害环境的影响,是运载火箭的重要组成部分[1]。整流罩分离是运载火箭发射过程中的关键动作,其对接精度又是影响既定分离动作能否正确执行的关键因素,直接影响发射任务的成败。新一代运载火箭采用大直径整流罩,其结构刚度下降,柔性增加[2]。目前卫星整流罩的装配分离面与空间分离面是重合的。这种类型的整流罩进行地面装配时,不仅需要较高的姿态调整精度,而且由于连接过程需要穿插和固定的连接螺栓数量很大,操作时间较长,需要在操作过程中保持所调整好的姿态[3]。通过文献和现有线性解锁结构可知,对于大直径柔性整流罩垂直合罩时,合罩精度需要达到±1 mm。
目前国内外整流罩垂直对接主要有两种形式:吊装垂直对接和推装垂直对接。美国德尔塔IV和日本H-2A整流罩通过吊装实现垂直对接。德尔塔IV整流罩直径为4.07 m,长度为11.75 m,目前国内成熟火箭中部分采用水平合罩后垂直扣罩。吊装合罩的优点为结构简单可靠、成本低,缺点为无法适应新一代火箭整流罩与箭体的对接。
印度宇宙神5、GSLV-D和意大利织女星采用脚轮推装方式实现垂直对接,如表1所示。目前国内成熟火箭中部分采用导轨推装方式垂直对接,操作简单,对接可靠,但这种方式需要铺设导轨,占用空间大。
现有文献中关于倾覆稳定性的判别方法主要有压力中心法[4]、有效质量重型方法[5]、零力矩点方法[6]、倾倒稳定边界法[7]及力角稳定性度量法等[8-9]。
本文设计了一套垂直对接平台,采用脚轮式高型架手动控制方式,可实现大直径柔性整流罩半罩轴向、径向和周向的精确调整。对接平台采用高刚度保型架对整流罩半罩保型,克服了整流罩半罩作为薄壁构件所存在的尺寸大、刚性差、易变形的缺陷,保证了整流罩精确垂直对接,采用力角稳定性度量法和力矩法分析计算了合罩平台防倾覆性能,并通过试验验证了合罩平台推行和调节性能。
1 大直径柔性整流罩垂直对接平台设计
1.1 结构设计
为了实现大直径柔性整流罩高精度合罩的要求,垂直对接平台采用脚轮式高型架和3个六自由度调节机构的结构形式,主要由多功能工作梯、保型架、底座、六自由度调节机构组成,如图1所示。
整流罩垂直对接时,左右底座分别承载整流罩半罩-型架组合体通过机械导向到达合罩区域后,通过调节六自由度位姿调节机构实现高精度的整流罩合罩。
六自由度位姿调节机构用于调节左右半罩的位姿使左右半罩实现对接,主要由滑动调节机构和滚动调节机构两部分组成,可实现六自由度的调节功能。滑动调节机构由底层滑台、上层滑台、升降机、球窝、标尺组成;滚动调节机构由升降机、球窝、外壳、标尺、螺纹伸缩杆、万向球轴承组成。
对接航向为X,横向为Y,垂直方向为Z,根据整流罩的位姿,通过调节3个六自由度位姿调节机构3个维度的位置实现整流罩的X、Y、Z方向和角度的调节。
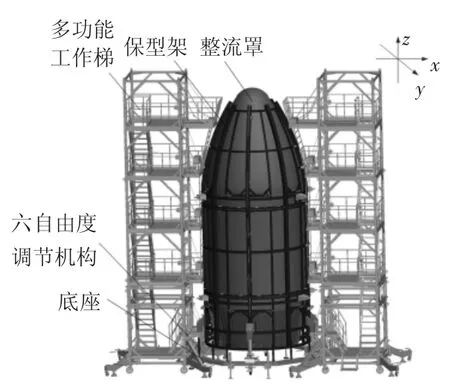
图1 合罩装置示意图
型架上下分布有两处整流罩连接接口,与整流罩接触位置留有16个可调节孔位的调节块,可实现孔位小范围内Z向调节,型架上留有滑槽,将调整块顺着滑槽滑入,实现孔位小范围内轴向调节,确保16个连接孔都能与整流罩进行连接。
1.2 防倾覆计算
1.3 仿真分析
基于ANSYS有限元分析,型架承受2倍过载和自身重力进行仿真,整体型架变形仅有2 mm,应力为72 MPa,如图3~图4所示。由结果可以看出,对于长10 m的型架形变为2 mm,型架挠度为1/5000,刚度很好,对柔性整流罩起到保型的作用,对接更加准确方便。

图3 型架整体形变
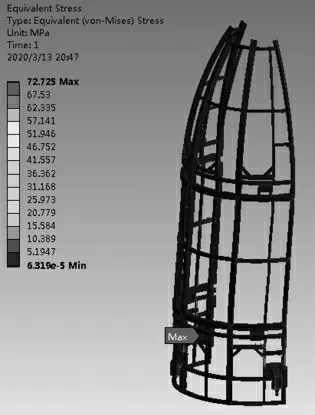
图4 型架所受应力
2 垂直对接平台验证试验
2.1 推行对接试验
为验证垂直对接平台在重载条件下推行、转向的性能,开展了推行对接试验。
试验中准备了3 t的配重,预设了对接目标孔,推动满载垂直对接平台向目标架靠近对接,进行了不少于5次的满载和空载对接试验,并记录对接的时间进行对接难易程度评估,结果如表1所示。结果表明5次试验均顺利完成,平均用时208 s。
试验结果表明,5次对接试验从开始到机械限位完全进入平均用时为208 s,对接过程简单可靠。空载推行对接试验如图5所示,满载推行对接试验如图6所示。
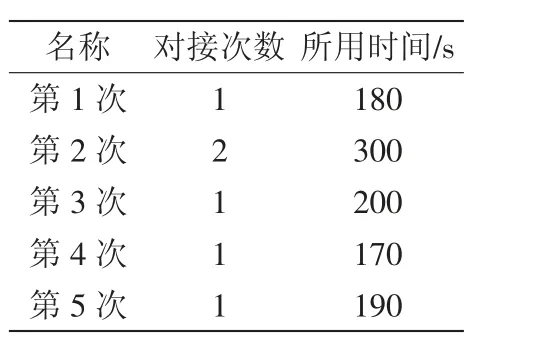
表1 满载对接试验结果

图5 空载推行对接试验

图6 满载推行对接试验
2.2 位姿调节试验
本文设计了垂直对接平台位姿调节试验的试验方法,在吊车保护下,对垂直对接平台进行六自由度调节试验,并对型架上不同位置的调节参数进行采样并记录,如图7所示。

图7 位姿调节示意图
1)试验步骤:a.用吊具将1/2型架吊至底座球窝内,固定安装稳固,吊绳松开但不松掉,静置10 min;b.将底座升降机降下,使底座脚轮着地,辅助支撑旋转90°至前进方向,在平地上推行合罩装置向前向后各200 m;c.推行后升起底座升降机,将底座调至水平,分别转动六自由度调节机构手轮进行x向、y向、z向、绕x轴旋转、绕y轴旋转、绕z轴旋转6个自由度调节,分别进行3次以上试验。
2)测量内容及测点位置:a.坐标设定,推行方向为X、横向为Y、垂直方向为Z,X向与合罩装置的推行方向一致;b.铺设测试点,共5点,在型架的底部和顶部分别安2个测量点(测量点1~4),在型架中间安1个测量点。c.检测型架姿态调整后的调节量,分别记录测量点1~5的位移量和偏转角度。
3)试验结果。试验结果如表2~表4所示。试验结果表明,X、Y、Z方向调节平均精度为0.5 mm,绕X、Y、Z 轴方向调节平均精度为0.11°,位移调节精度较高,且可实现小范围内调节,角度调节精度略低,在实际使用过程中,为了保证对接过程安全可靠,整个过程非常缓慢,对角度调节精度要求不高由此判断垂直对接平台达到预期的调节要求。
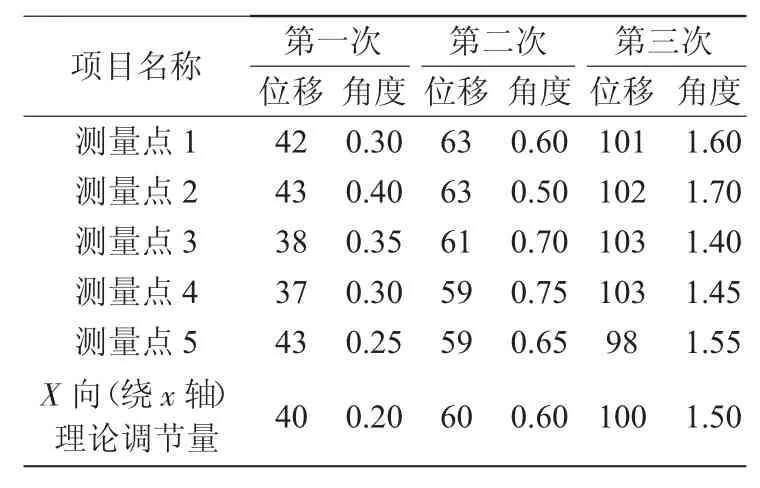
表2 X向(绕x轴)调节量记录表
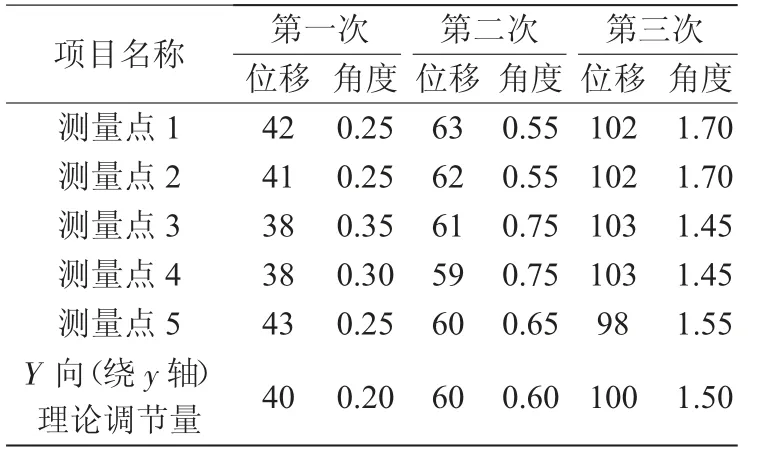
表3 Y向(绕y轴)调节量记录表
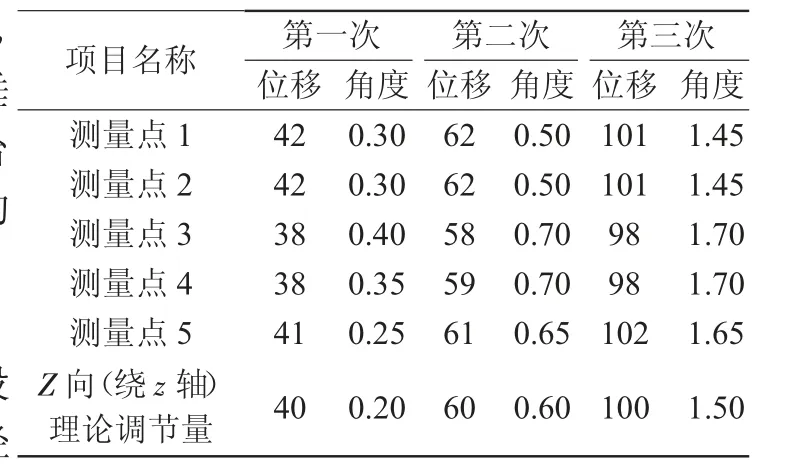
表4 Z向(绕z轴)调节量记录表
3 结 语
本文设计的大直径柔性整流罩采用脚轮式高型架手动控制方式,通过六自由度调节机构对整流罩进行姿态调整,经试验验证,实现了整流罩的推行对接和六自由度调节功能,达到±1 mm调节精度要求。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
光学精密工程(2022年22期)2022-11-28
一重技术(2021年5期)2022-01-18
航天返回与遥感(2021年5期)2021-11-11
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
中学生数理化·八年级物理人教版(2019年4期)2019-05-20
电子技术与软件工程(2019年6期)2019-04-26
装备制造技术(2018年10期)2018-12-24
导弹与航天运载技术(2018年3期)2018-12-09
北京航空航天大学学报(2016年5期)2016-11-16