
基于线性二次型的桥式起重机荷载消摆控制算法的研究
2020-07-14 15:34刘卉崔辉
科技创新与应用 2020年21期
关键词:桥式起重机
刘卉 崔辉
摘 要:针对桥式起重机二维荷载运动的消摆问题,将其转化为二次线性规划控制。规范化实现求解线性二次型过程,采用由状态线性反馈控制率构成的闭环最优控制系统,设计线性二次型轨迹跟踪控制器。仿真结果表明,荷载运动的实际输出轨迹能够跟踪上预设线轨迹,达到对运动荷载的消摆控制效果。
关键词:线性二次型;桥式起重机;荷载消摆;轨迹跟踪
中图分类号:TP273 文献标志码:A 文章编号:2095-2945(2020)21-0012-02
Abstract: Aiming at the problem of eliminating swing of two-dimensional load movement of bridge crane, it is transformed into quadratic linear programming control. The closed-loop optimal control system composed of state linear feedback control rate is used to design the linear quadratic trajectory tracking controller. The simulation results show that the actual output trajectory of the load movement can track the preset trajectory and achieve the effect of anti sway control of the moving load.
Keywords: linear quadratic form; bridge crane; load swing control; trajectory tracking
引言
線性二次型规划控制算法的被控对象为线性系统,其通常以状态空间的形式表达,并选取目标函数为状态量和控制量的输入。当系统偏离平衡状态时,线性二次型控制算法能够使系统重新维持在平衡状态。由线性二次型控制器求解出的解析式通常是线性函数,这就可以通过状态反馈实现闭环的最优控制,从而达到所需的控制效果。
3 荷载运动系统的仿真与分析
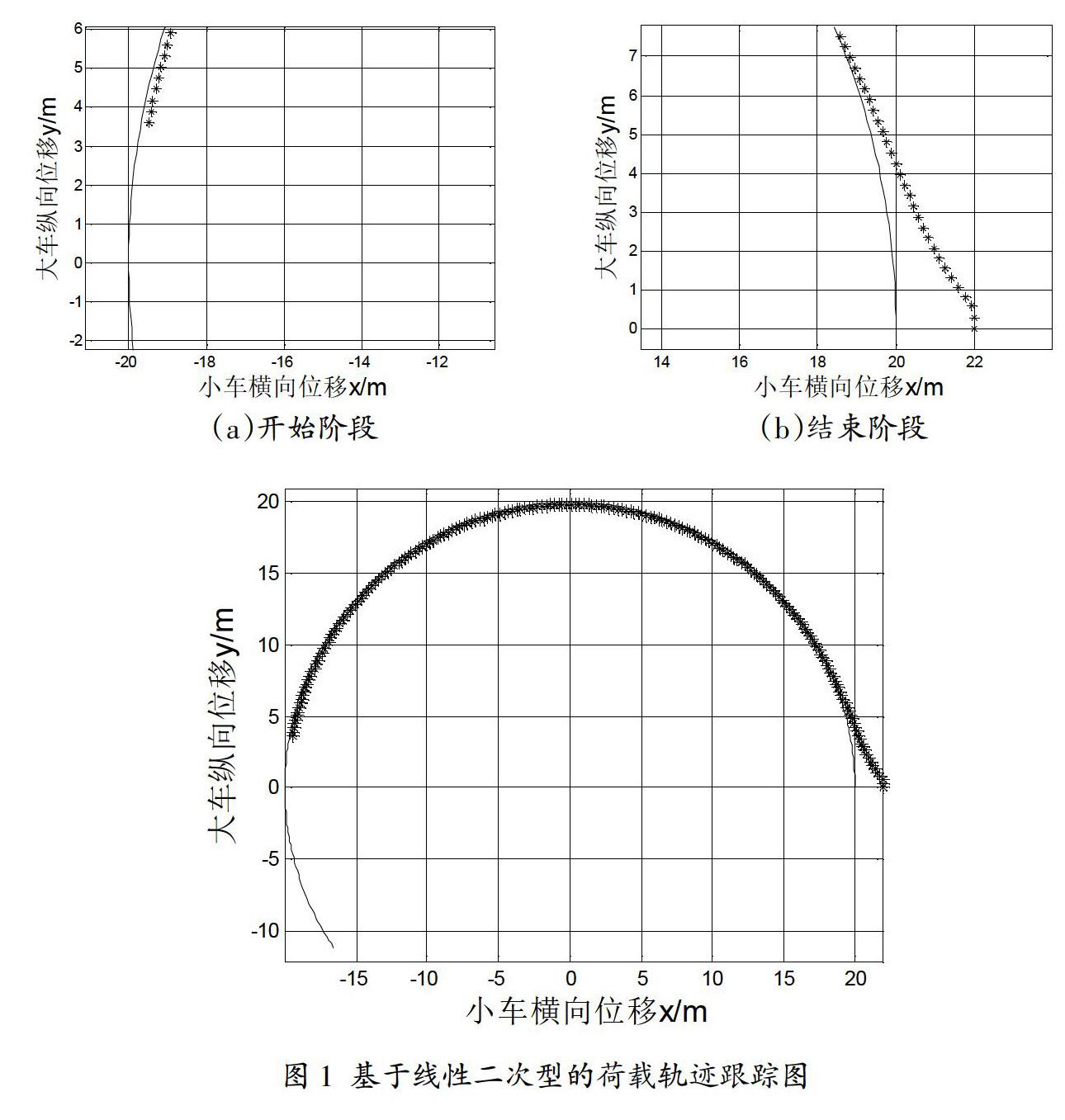
起重机荷载运动参数设定为:小车质量M=50kg,荷载质量m=20kg,绳长为l=2m,μ=0.2,重力加速度g=9.8m/s2,在Matlab环境下对二维荷载运动模型的消摆控制过程进行仿真。通过给定的运动各项系统参数,生成参考轨迹,并对目标函数进行求解,完成对设定轨迹跟踪。
从图1可以看出,在线性二次型控制器的作用下,荷载运动的实际输出星轨迹能够跟踪上预设线轨迹,只在开始和结束阶段存在稍许的偏差,控制效果明显,能够满足消摆要求。
4 结论
运用状态线性反馈控制构成最优化控制系统,将运动荷载的摆动问题转化为二次线性规划控制问题,设计荷载运动轨迹跟踪控制器,实现对其运动轨迹进行跟踪控制。为了实现规范化求解线性二次型的过程,将求解得到的最优解表达式写成统一的解析式,并采用由状态线性反馈控制率构成的闭环最优控制系统,这样可以有效地保证多项性能的控制指标。
到目前为止,荷载摆动的抑制还主要依赖于工人熟练的操作经验,真正应用到实际工程上的消摆控制算法还较少,大多数的控制方法还仅仅停留在仿真分析及等比例缩小模型的试验上。因此,如何将控制策略应用到实际工程项目上,将成为我们面临的一大挑战。
参考文献:
[1]Mohamad Kazem Shirani Faradonbeh,Ambuj Tewari, George Michailidis. On adaptive Linear-Quadratic regulators[J]. Automatica,2020,117.
[2]闫其乐,高俊岭,吴晶晶.基于线性二次型最优调节器的虚拟同步发电机控制策略[J].重庆工商大学学报(自然科学版),2020,37(02):23-28.
[3]房泽平,吴娜.基于频率线性二次型算法的智能车辆横向控制[J].科学技术创新,2019(34):1-4.
[4]刘旭杰,徐惠民,陈丰.基于线性二次型的电动汽车最优驱动控制系统的设计与仿真分析[J].宿州学院学报,2019,34(06):80-84.
[5]李想,曾春年,罗杰,等.基于线性二次型最优控制的自适应巡航控制算法研究[J].武汉理工大学学报(信息与管理工程版),2019,41(02):191-196.
猜你喜欢
科学与财富(2017年8期)2017-04-11
科学与财富(2017年6期)2017-03-19
电子技术与软件工程(2016年24期)2017-02-23
科技与创新(2016年15期)2016-09-23
科技视界(2016年1期)2016-03-30
