
陀螺全站仪在地下控制测量中的应用
2020-07-17 14:47曹起
绿色环保建材 2020年6期
曹 起
上海勘察设计研究院(集团)有限公司
1 引言
目前轨道交通、公路隧道、铁路隧道工程越来越多,且越来越向大型化发展,地下导线的长度也越来越长,地下导线测量难度也是越来越高,为了能够有效的检核和提高地下导线的测量精度,陀螺全站仪的定向优势就得到了显现。
2 陀螺全站仪基本原理
2.1 基本原理
陀螺全站仪是将陀螺仪和高精度全站仪集成于一体,利用高速回转体的内置陀螺测定真北方位角。其主要应用于大地测量、地下工程测量等领域。陀螺全站仪的基本原理可以理解为陀螺灵敏部(包括转子和内外两环)在重力作用下,产生一个北向进动的力矩,使其主轴围绕子午面往复摆动。往复摆动的光信号通过传感器转换为电信号传送给控制系统,控制系统自动跟踪陀螺灵敏部的方位摆动,并进行加矩控制,解算出被测目标的北向方位角。
2.2 测量步骤
陀螺全站仪定向测量步骤采用“地面已知边-地下待定边-地面已知边”的测量模式。
(1)在地面已知边上测量仪器常数。陀螺仪轴与望远镜光轴及观测目镜分划板零线所代表的光轴通常不在同一竖直面中,所以假想的陀螺仪轴的稳定位置与地理子午线存在一个夹角,这个夹角称为仪器常数,一般用Δ 表示,陀螺仪子午线位于地理子午线的东边为正;反之为负,如图1所示。
实际过程中,仪器常数Δ 可以在已知定向边上测量并计算出来。如上图所示,A0为已知定向边CD的地理方位角。在C点架设陀螺全站仪,测量求出CD边的陀螺方位角,求出仪器常数:

测定的仪器常数实际上是测定已知边CD 的陀螺方位角。一般情况下,在地下测量定向之前,在已知边进行2~3 次仪器常数。
(2)地下待定边上C'D'测量陀螺方位角。仪器架设在C'点上,测出C'D'陀螺方位角α'T。那么定向边的地理方位角A为:
独立进行两次测定地下待定边C'D'陀螺方位角。
(3)重新回到地面已知边CD测量仪器常数。仪器重新搬到地面后,在CD边上重新测定仪器常数3次。然后求出仪器常数的最或是值。
(4)子午线收敛角的求算。求算的地下待定边坐标方位角α,并非地理方位角A,因此还需要求算子午线收敛角γ,如图1所示。
地理方位角、坐标方位角以及子午收敛角之间的转换关系为:
每年都有数以百万计的大学生需要决定学习什么科目。这是一个非常重要和困难的决定,是在父母、朋友和不同兴趣和意见的教授的压力下作出。它也受学生自己的个人恐惧和幻想的影响,而这些恐惧和幻想本身是由电影、小说和竞选宣传所塑造的。更复杂的是,一个特定的学生并不真正知道在某一特定职业中取得成功需要什么,也不一定对自己的长处和弱点有现实的认识。

(5)地下待定边C'D'的坐标方位角的求算。地下待定边C'D'的坐标方位角为:

3 陀螺定向在联系测量中应用
现有联系测量有多种,其中一井定向、两井定向、导线直接传递法作为联系测量的常用方法,已经得到广泛的应用,但是针对竖井较深、洞口狭窄的有限测量条件,可使用陀螺全站仪、投点组合定向的方法进行联系测量。
3.1 测量方法
测量方法如图2 所示,A、B 为投点位置,Q'E为地下方位角起算边,α1、α2为陀螺方位角。

图2 陀螺全站仪、投点组合定向示意图
3.2 案例应用
某市地铁3号线某区间采用矿山法施工,在车站端头井施工滞后的情况下,为了增加工作面,加快施工进度,在区间离车站不远处增设竖井,但是竖井井口长宽6m×8m,考虑到该区间长度2.3km,洞口狭窄,单纯采用一井定向的方式,精度较低,可靠程度不高。故在实施过程中,该处联系测量分别采用一井定向和陀螺全站仪+投点组合定向进行对比。陀螺测量采用GAT-D05陀螺全站仪(标定精度5″),测量地下起算方位角,陀螺定向结果与一井定向结果相差24″。待后续车站端头井开挖至底,满足两井定向条件时,再用两井定向的方法与前两者测量结果进行对比,结果显示,两井定向与陀螺测量的方位角相差6秒,结果更为接近。
从上述案例测量结果显示,使用陀螺仪定向具有定向精度高、不受井筒条件限制工作效率高等优点,可以有效提高有限测量条件下联系测量的精度。
4 陀螺定向对地下导线检核作用
在地下隧道施工测量过程中,地下导线的敷设一般视作支导线的形式,测角误差对导线精度影响较大。特别是长距离隧道,导线测量不断积累误差,远离导线边的精度较低。相比之下,陀螺定向具有一定的优势,不仅不会误差累积,还能大幅度的提高导线控制精度。
以某市地铁区间案例分析:
起点至隧道贯通面约2km,根据《城市轨道交通工程测量规范》要求,分别在隧道开挖至1km和1.5km处采用GAT-D05陀螺全站仪进行陀螺定向测量。

图3 某市3号线过海段地下导线点及陀螺定向边示意图
ⅢGDG03→WY01 进洞前与出洞后6 测回陀螺方位角平均值为T 地上=213°36'34.2″,地下待定边Z16354→Z16185陀螺方位角测量两测回平均值为T地下=248°45'23.6″。
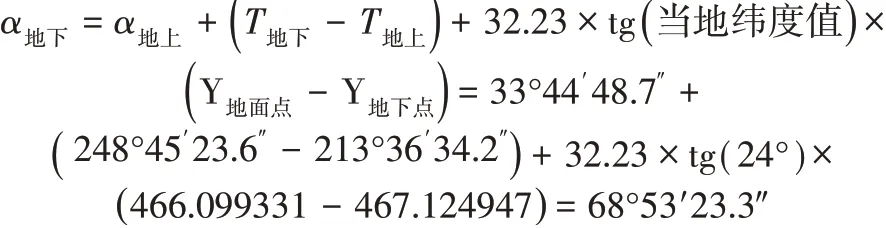
通过计算显示,导线边Z16354→Z16185通过坐标反算方位角与陀螺定向计算的坐标方位角差值为-4.9″。
同样的陀螺定向方法,在隧道掘进至1.5km 处,测量最末导线边Z16830→Z16733,坐标反算测方位角与陀螺定向计算坐标方位角差值为11.5″。距离贯通面还有约500m的长度,取2倍陀螺定向中误差作为陀螺定向极限误差(10s)。考虑最不利因素影响。最大误差为22.5″,计算22.5″影响的横向贯通误差为5.4cm<10cm限差要求。
从上述案例中测量结果显示:(1)随着导线的延伸精度逐渐降低进一步得到证实。(2)陀螺定向的测量具有一定的独立性,能够有效的检核地下导线点的测量精度,进行过程的误差估算,可有效判断隧道是否能够顺利贯通。
5 陀螺定向在长距离隧道导线平差
以上讨论的实际工程案例是在隧道能够满足贯通需求的时候,仅以陀螺定向作为检核地下导线边使用,不进行平差改正,但是针长大隧道,当通过误差计算,陀螺定向边反算的方位角与支导线坐标反算方位角难以满足正常的贯通要求,那么就需要将陀螺定向结果进行与地下导线测量结果进行平差计算。
5.1 加测一条陀螺定向边导线平差
指的是一端为地下已知起算边,另一端为陀螺定向边。如下图,AB为地下导线起算边。CD为陀螺定向边。
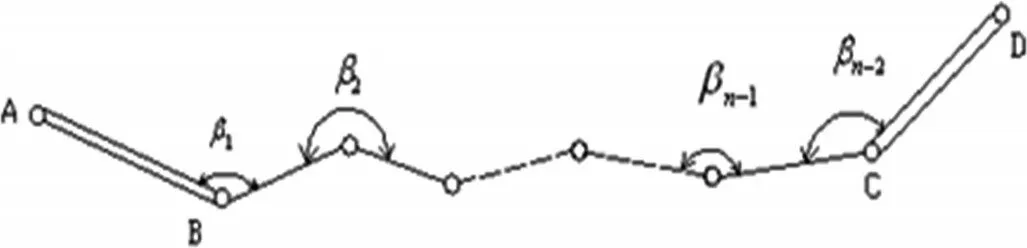
图4 加测一条陀螺定向边的导线平差示意图
以GAT-D05陀螺全站仪为例(标定精度为5″),测角精度按照mβ=2.5″计,可以认为陀螺定向误差mαn=2mβ,令单位权中误差μ =m0,则各观测值的权

根据条件平差原理,对于只有一个陀螺定向边的方向附合导线,可得条件方程:

公式中vβn为各测站测角改正数,vαn为陀螺定向边方位角改正数。w为CD边坐标方位角与陀螺方位角差值。组成法方程,得改正数:

5.2 两条陀螺定向边导线平差
根据条件平差原理,对于只有一个陀螺定向边的复核导线,可得条件方程

公式中vβn为各测站测角改正数,vαn为陀螺定向边方位角改正数。w为陀螺定向边坐标方位角与陀螺方位角差值。组成法方程,得改正数:

三段及多段陀螺定向边,简易计算,可按照上述方法分段进行简易平差计算。
根据文献把陀螺定向边作为坚强边,不考虑误差影响,也不对陀螺方位角进行改改正,其平差方法与一般附合导线类似,角度改正数即为,多段附合导线即为该方法计算简单,较为实用。
6 结束语
隧道工程的贯通是工程质量的关键,采取有效措施保证地下导线有足够的测量精度,并保证顺利贯通。
(1)陀螺全站仪、投点组合定向的方法能够有效的应用在洞口狭窄、井筒较深的有限测量条件的联系测量中,有效保证地下定向边的精度。
(2)陀螺定向能够有效检核地下导线的测量精度,能够通过误差计算一定程度上判断是否能够满足隧道贯通要求。
(3)针对长距离隧道,当不满足(2)的条件下,加测多个陀螺方位角,参与导线度平差,以分段进行简易平差的方式,能够有效的提高地下导线精度,并且把陀螺定向边作为坚强边,不考虑误差影响,计算方法简单实用。
猜你喜欢
结构工程师(2022年2期)2022-07-15
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
空间科学学报(2020年4期)2020-04-22
小学生学习指导(低年级)(2019年10期)2019-10-16
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
铁道标准设计(2018年12期)2018-11-22
现代计算机(2018年19期)2018-08-01
快乐语文(2018年36期)2018-03-12
