考虑不确定扰动的主动后轮转向动力学控制与试验研究*
2020-07-27 09:34赵韩,邓斌
汽车工程 2020年7期
赵 韩,邓 斌
(1.合肥工业大学机械工程学院,合肥 230009; 2.合肥工业大学汽车与交通工程学院,合肥 230009)
前言
随着汽车电子技术和车辆动力学控制理论的发展,车辆控制逐渐由传统的被动控制转变为更先进和智能的主动控制,车辆主动控制技术正成为汽车技术发展的热点方向[1-2]。主动后轮转向是汽车主动控制技术的一个重要组成部分,主动后轮转向使车辆在转弯行驶过程中车辆动态控制系统主动调节后轮角度,使得车辆后轮有更好的转弯特性,如更小的转弯半径、更稳定的车身姿态。集成了主动后轮转向系统的车辆转向系统也称为四轮转向系统(4WS)。主动转向系统的引入对整车性能有很大的提高,不仅提高了整车的操稳性,也增加车辆的主动安全性,如在主动防侧翻、防侧向风干扰等[3-5]。
目前,主动后轮转向控制的研究主要是针对主动后轮转向策略、主动后轮转角优化、主动后轮转向对操稳性的影响[6-11]展开研究,但关于后轮转向执行机构以及转角跟踪控制的精度研究相对较少。
主动后轮转向执行器机构有多种类型,可根据电机数目分为双电机结构和中央单电机结构,如图1所示。双电机结构是在后轮左右两边各有一个转向执行电机,中央单电机结构则通过传统的齿轮齿条或者循环球转向机构实现左右后轮联动转向。相比中央单电机结构,双电机机构控制精度更加精准,控制方式更加灵活。在转向行驶过程中,如果出现两侧后轮转向的角度控制误差较大或滞后严重,则有可能产生拖曳现象,进而加剧轮胎的磨损,严重则会导致车辆无法正常行驶。因此主动后轮转向执行机构的难点是在外部大负载扰动下保持目标角度较高的跟踪精度与同步精度。
针对主动后轮转向角度跟踪控制,多数研究学者和汽车厂商采用传统的PID或者PD控制。PID控制简单实用,但抗干扰能力一般,鲁棒性不强。Yamaguchi等[12]针对车轮的侧偏刚度估计,应用自适应控制方法实现转向轮转角的跟踪控制,但是其对于路面负载及扰动的预测估计方法是基于轮胎特性在较好线性区,并没有考虑到实际情况下轮胎的非线性以及道路工况的不确定性。Wang等[13-15]针对转向系统的非线性问题,采用滑模变结构控制实现了对转角的跟踪控制,滑模控制能够解决控制系统的非线性问题,且具有较强的鲁棒性,但滑模控制在平衡点的抖振现象仍是在实际应用中要克服的问题。章仁燮等[16]结合了故障诊断和容错设计的结果,为保证转向轮转角跟踪稳定性,设计了前馈加抗积分饱和状态反馈的控制律,防止由于积分饱和引起的性能恶化,但基于模型的状态反馈控制效果依赖动力学模型精度,鲁棒性较差。
本文中基于一种可调长度的束角杆机构,主动调节束角杆的长度实现后轮转向角度调节。考虑到车辆转向控制系统具有典型的非线性和不确定性[17],并受到路面和轮胎的约束及干扰,使得转向角度控制器的设计较为复杂。自抗扰控制器(ADRC)[18-19]通过特有的扩张状态观测器能够跟踪模型未知部分和外部未知扰动的影响,并给出控制量补偿扰动,对非线性、参数不确定、扰动系统具有很好的控制效果,且ADRC属于无模型控制,对动力学模型精度依赖较低。本文中在双电机束角杆转向机构基础上,设计主动后轮转向自抗扰控制器以实现后轮转向角快速、平滑,高精度跟踪控制。
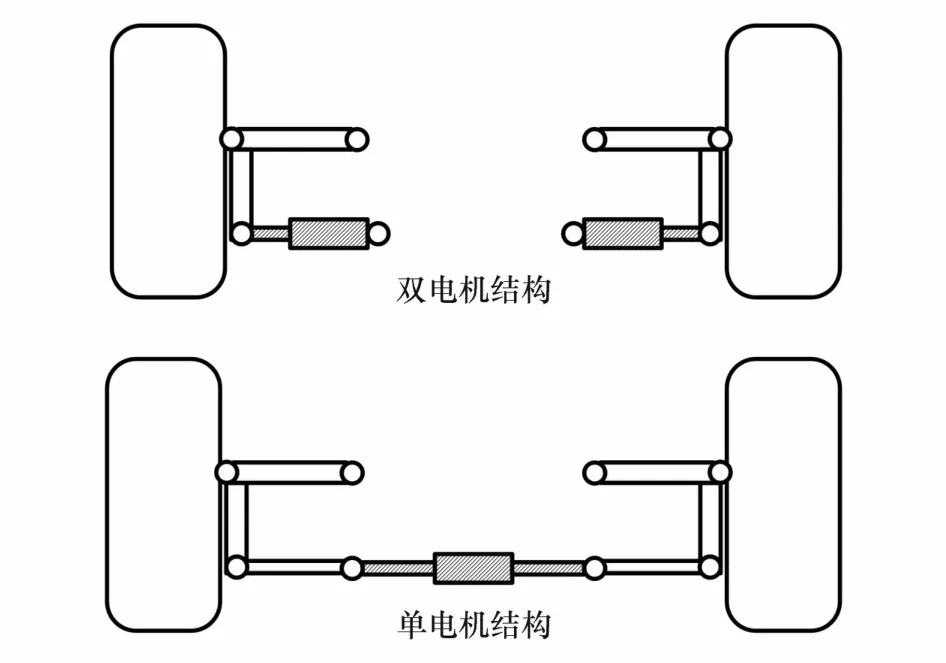
图1 两种不同的主动后轮转向结构
1 主动后轮转向机构建模
1.1 主动后轮转向机构
主动后轮转向机构是基于电控可调长度的束角杆结构实现。将转向机构替换后轮悬架系统的后轮束角杆,通过主动调节束角杆的长度实现后轮转向角度调节。左右两侧后轮均采用同样的机构对称安装,以实现左右两侧后轮独立转向控制。本文中仅以左侧主动后轮转向结构作为建模对象,左侧主动后轮转向结构如图2所示。主动转向执行器由直流驱动电机1、行星齿轮减速器2、丝杠副3、电机壳体4和推杆5等组成。主动转向执行器一端铰接车身,另一端与转向摆臂6铰链接。通过主动转向执行器施加驱动力,通过摆臂6转换成车轮转向力矩。
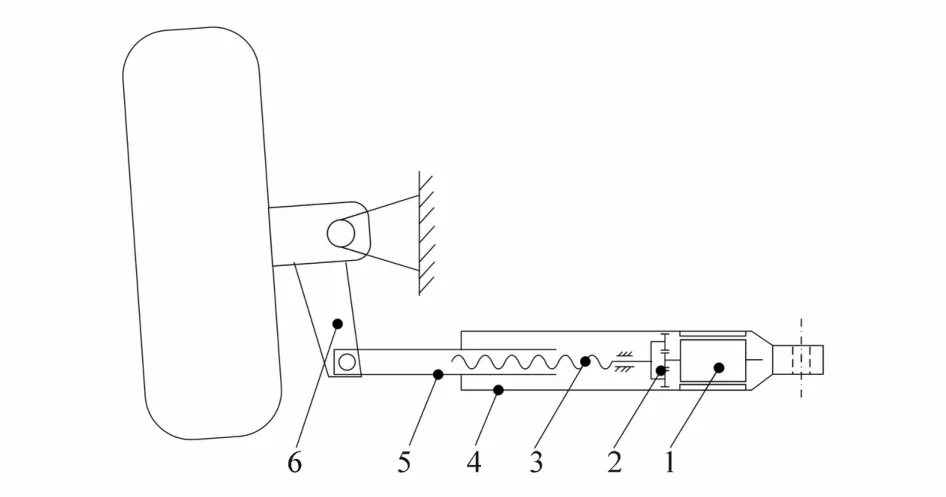
图2 主动后轮转向机构
1.2 主动后轮转向机构动力学建模
为方便模型建立,对主动后轮转向执行机构进行简化,简化后的动力学模型如图3所示。
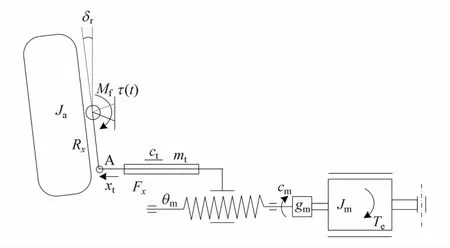
图3 主动后轮转向机构动力学模型
后轮转向执行器是一种电控可调长度的横拉杆结构,包含电机、行星齿轮减速器、丝杠推杆。对电机、减速器、丝杠推杆建立动力学模型:

式中:Jm为旋转部件总转动惯量;Te为电机驱动力矩;ig为行星齿轮减速比;θm为电机旋转角度;cm为旋转部件总黏性摩擦系数;iw=l/2π为丝杠传动比,l为丝杠导程;xt=θmiw/ig为推杆位移;Mt为推杆质量;ct为直线导轨黏性摩擦系数;Ft为负载作用力。
综合考虑到传动系统的间隙,本文中将间隙等效到转向摆臂关节与推杆电机连接处,如图3标记A处,令Fx(e)为具有传动间隙的非线性函数,令e=xt-δr,设传动间隙为 2Δ,则 Fx(e)为
式中:Ja为轮毂系统等效转动惯量;δr为后轮转角;Rx为转向摆臂力矩半径;τ(t)为非线性的回正力矩、未知路面的扰动力和未建模动态等不确定性的合成;Mf为库伦摩擦阻力矩;sign(为符号函数。
驱动电机这里选择同步旋转坐标系d-q下的数学模型,定子电压方程以及电磁转矩方程为
式中:ud、uq分别为定子电压的 d-q轴分量;id、iq分别为定子电流d-q轴分量;R为定子电阻;we为电角速度;Ld、Lq分别为 d-q轴电感分量;ψf为永磁铁磁链;pn为电机的极对数。
对于表贴式三相永磁同步电机,定子电感满足Ld=Lq=Ls,电磁转矩方程简化为式(6),通过磁场定向控制(FOC)的方法直接控制iq轴的电流可实现电机的转矩控制。

根据式(1)~式(6),得到整个后轮转向系统的动力学模型:

由式(8)可知,后轮转向系统动力学模型具有较强的非线性和不确定性,针对该系统必须依赖抗干扰能力强的非线性控制器才能实现良好的控制。
2 自抗扰控制器设计
2.1 主动后轮转向角度跟踪控制结构
考虑到系统的非线性和不确定性,本文中采用自抗扰控制器实现对主动后轮转向角度的跟踪控制,其控制系统的结构如图4所示。根据后轮转角参考模型得到目标后轮转角,采用自抗扰控制方法控制主动后轮转向器快速、准确、稳定跟踪。图中,θsw为车辆转向盘转向角,δf为前轮转角,忽略车辆前桥齿轮齿条转向机构,则δf=θsw,ux为车辆纵向速度,u为控制器输入,w(t)为外部不确定扰动。

图4 主动后轮转向角度跟踪控制结构
2.2 主动后轮目标转向角
后轮的转向角使后轮产生主动的侧偏角,由此产生侧向力,使得车辆的质心侧偏角减小。本文中在2自由度转向动力学模型基础上,以质心侧偏角为0作为目标函数,由此确定前轴转角和后轴转角的转向关系,进而获得后轮转向控制器跟踪的目标角度。
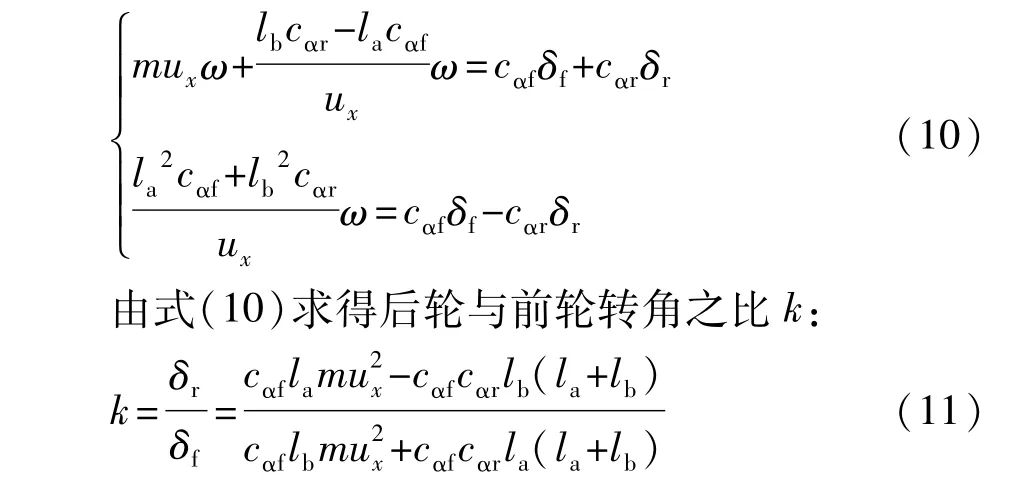
建立2自由度转向动力学模型:
式中:m为整车质量;I为整车绕z轴的转动惯量;cαf、cαr分别为前后轮侧偏刚度;la、lb分别为前后轴到汽车质心的距离;β为车身质心侧偏角;δf为前轮转角;ω为车身横摆角速度。
根据式(11)得到前、后轮转向角随车的变化关系,如图5所示。车速较低,后轮转向角为负值,与前轮转动方向相反。车速较高时,后轮转向角为正值,与前轮转动方向相同。车速在11~14 km/h时,后轮转向角约等于0,即车辆为正常转向状态。
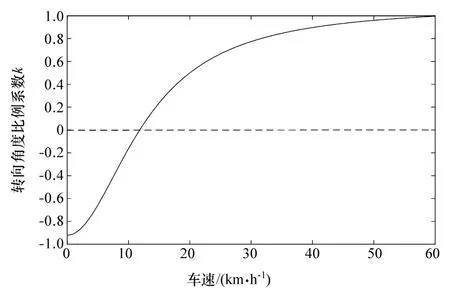
图5 稳态β=0时前、后轮转向角随车速变化关系

2.3 后轮转向角跟踪控制器设计
根据式(8)后轮转向机构动力学模型,可以抽象2阶受扰非线性系统:
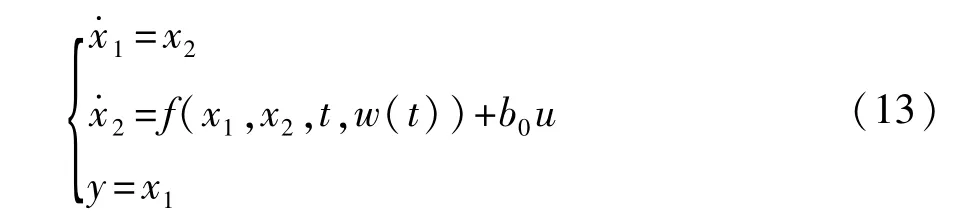
式中:x1=δr和x2=为系统状态;b0为控制输入增益,通过动力学建模,在小转角范围内,可将b0估计成常值 b0=igRx/iwJa;f(x1,x2,w(t))为系统非线性函数,其包含了系统参数不确定产生的内扰和外部不确定产生的内扰;结合式(8),f(x1,x2,t,w(t))=
改进自抗扰控制器采用2阶结构模型。系统由3个部分组成,改进跟踪微分器(NTD)、非线性扩张状态观测器(ESO)和非线性组合反馈控制律(NLSEF),结构如图6所示。
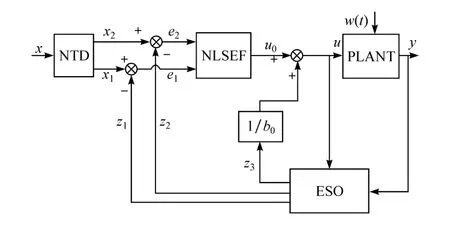
图6 2阶改进自抗扰控制器结构图
(1)改进非线性跟踪微分器 x经过安排过渡过程,利用跟踪微分器可得到光滑的信号输入x1和微分信号x2,如式(14)所示。
式中sig(·)为改进神经网络激励函数,该函数融合了线性与非线性的特性,具有饱和性与单调性,同时相比于饱和函数,又具有光滑性;速度因子λ是外部可调参数,λ越大跟踪速度越快。改进非线性跟踪微分器可以保证良好的跟踪动态特性,同时有效降低因采样噪声和直接微分引起的系统抖振。
(2)设计非线性扩张状态观测器 扩张状态观测器是控制器的核心部分,它采用非线性状态观测器对被控对象的状态进行观测,通过扩张的状态量对后轮转向动力学模型中非线性摩擦力、未建模因素和外界不确定扰动等进行补偿。建立如式(15)所示的扩张状态观测器,给出被控对象的各阶状态变量及总扰动作用量的估计值。
式中:e为观测误差;h为采样周期;β01、β02、β03、δ为可调外部参数;fimp(e,a,δ)为改进非线性函数,其形式如式(16)所示。

式中 δ>0,取 5h≤δ≤10h。
为保证 ESO稳定,通常,β01h=1而 β02、β03按照与 β01的关系确定,b0值较大时,β02、β03可适当选择大一些。
(3)非线性组合反馈控制律 非线性组合实质是一种非线性状态误差反馈控制律,它将经典PID的线性加权转换为反馈效率更高的非线性组合,得到非线性PD控制算法,以此提高算法控制效果。为避免fal函数引起控制输出抖动,采用改进fimp函数应用到非线性反馈控制律中,使系统具有更好的鲁棒性。
选用状态误差反馈来设计反馈控制律。系统状态误差 e1(k)=x1(k)-z1(k),e2(k)=x2(k)-z2(k),通过引入扰动估计值z3(k)/b0,被控系统补偿成线性积分串联型系统。
式中:u0(k)为误差反馈控制量;u(k)为最终补偿后的反馈控制量;β1为比例增益;β2为微分增益;a1、a2、δ1、δ2为可调控制参数,a1、a2的取值一般为 0<a1<1<a2,a1取0.5,a2取1.25。
3 控制系统仿真与结果分析
3.1 控制系统仿真试验平台
为验证控制方法的效果,根据图6的控制系统结构框图建立主动后轮转向跟踪控制系统联合仿真平台,其中改进ADRC算法采用Simulink中的s函数编程实现,车辆模型采用Carsim车辆动力学模型。仿真试验框架如图7所示。
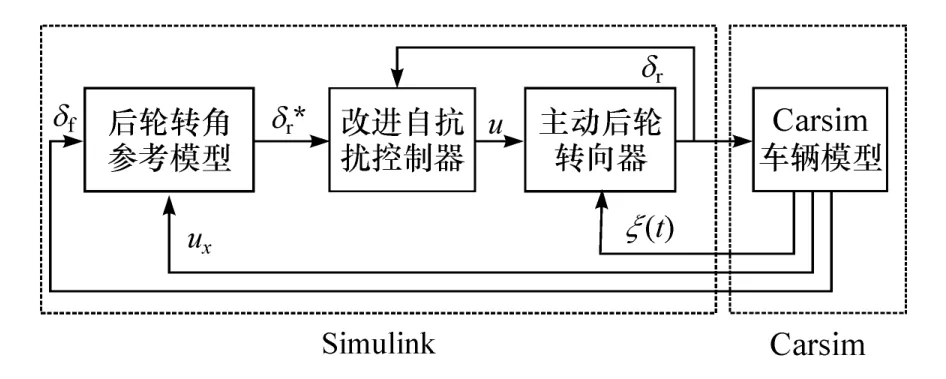
图7 主动后轮转向角跟踪控制仿真试验框架
图7闭环仿真框架中,先利用Carsim车辆模型输出纵向车速ux、实际车辆转向工况负载以及扰动ξ(t)和前轮转角δf,然后根据后轮转角参考模型得到目标后轮转角,最后采用改进ADRC输出控制信号u使主动后轮转向器快速、准确、稳定跟踪目标转角。
仿真试验车辆模型主要参数如表1所示。
分别进行静态转向工况、加速正弦转向工况来验证主动后轮转向角跟踪控制的特性,并且对比分别使用PID控制和改进ADRC的试验结果。
表1 车辆模型参数

参数 数值整车质量m/kg 1 358质心到前轴距离l a/m 1.3______质心到后轴距离l b/m 1.4______整车绕 z轴转动惯量 I/(kg·m2)2 450_____前轮侧偏刚度 cαf/(N·rad-1) 5.9×10_____4后轮侧偏刚度 cαr/(N·rad-1) 7.12×10____4_____后轮绕主销转动惯量J a/(kg·m2)1.37______后轮转动摆臂半径Rx/m 0.17行星齿轮减速比g i_____________________________4_______丝杆导程l/m 0.01
3.2 仿真结果分析
3.2.1 跟踪性能分析
静态转向过程中,转向盘阶跃输入,对应后轮参考转角信号幅值为6°。图8为采用改进ADRC方法的后轮转角跟踪及误差曲线。由于左右两侧后轮对称安装,动力学模型和控制方法一致,这里仅给出左侧的后轮转角跟踪曲线。为对比控制算法的有效性,增加了采用PID控制器的对比仿真试验,PID控制器采用Z-N方法整定参数。
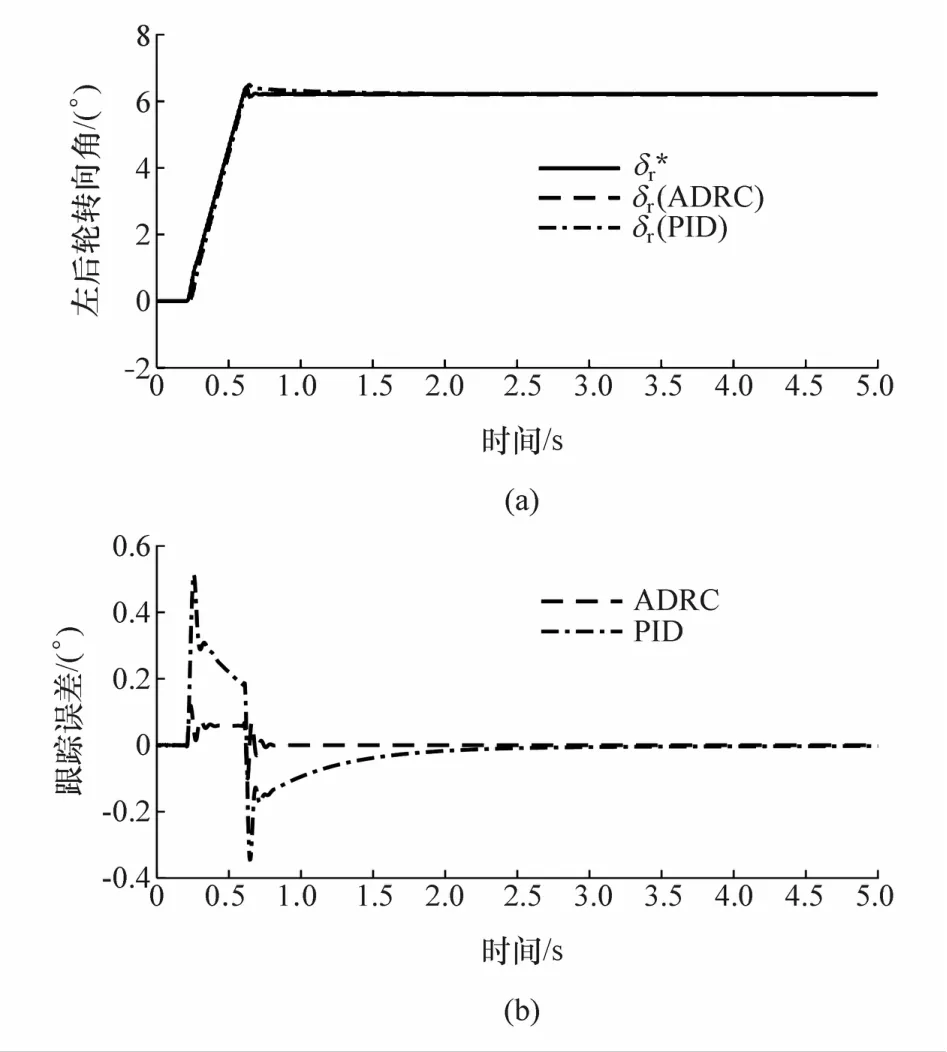
图8 左后轮转角跟踪及误差曲线
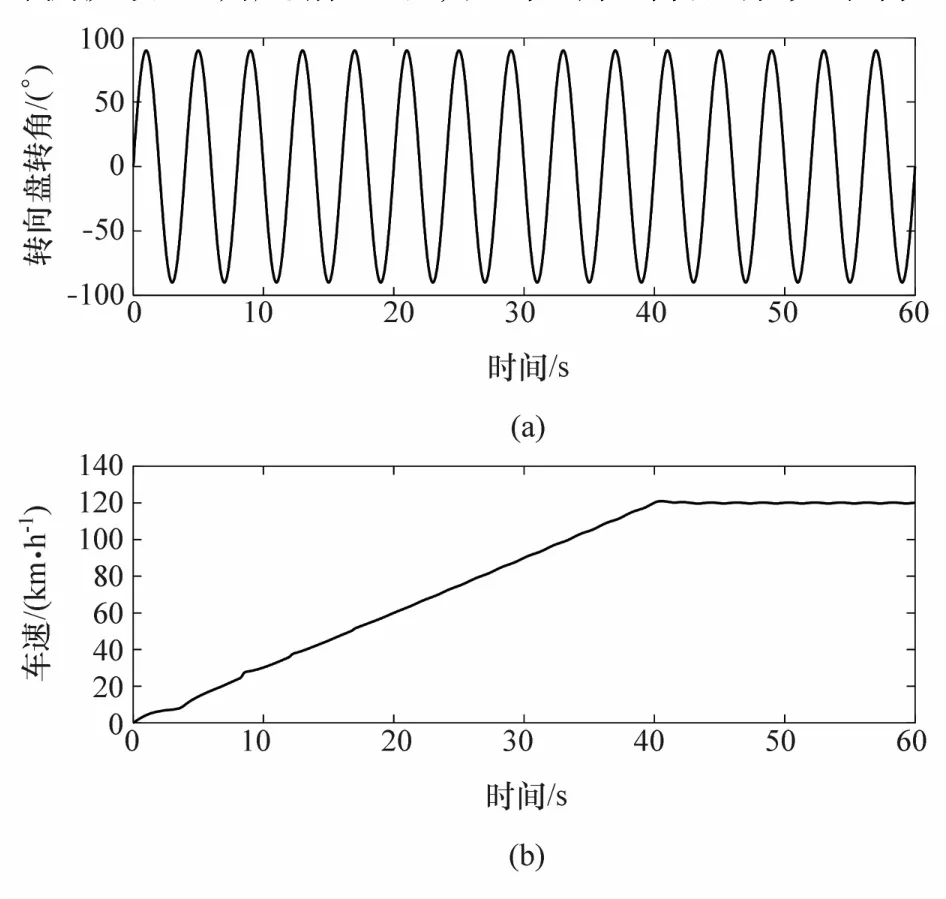
图9 加速正弦转向试验工况图
3.2.2 抗干扰性能分析
为验证设计的改进ADRC控制器的抗干扰能力,选择加速正弦转向工况进行仿真。加速转向工况,车子缓慢加速到120 km/h,转向盘转角按幅值为90°、周期为4 s的正弦曲线转动,转向盘转角和车速变化如图9所示。车辆动态行驶过程中,侧向加速度和左右后轮转向负载扰动力矩的变化如图10所示。图11和图12分别为左右后轮转向角跟踪曲线及跟踪误差。从图9和图10可以看出,随着车速的增加,车辆的侧向加速度也逐渐变大,实际表现为地面对主动后轮转向机构扰动作用力矩逐渐变大。从图11和图12的转向角跟踪与误差可以看出,在外部扰动变化较大的情况下,改进ADRC控制方法仍能很好地实现高精度跟踪,而PID方法对外部干扰抑制能力较差,跟踪误差随着负载增大而逐渐增大,且在车辆高速行驶状态下控制角抖动比较明显。综上,由图11和图12误差结果可知,在外部负载扰动不确定情况下,设计的控制器有效抑制了扰动,使后轮转角控制保持高精度跟踪。
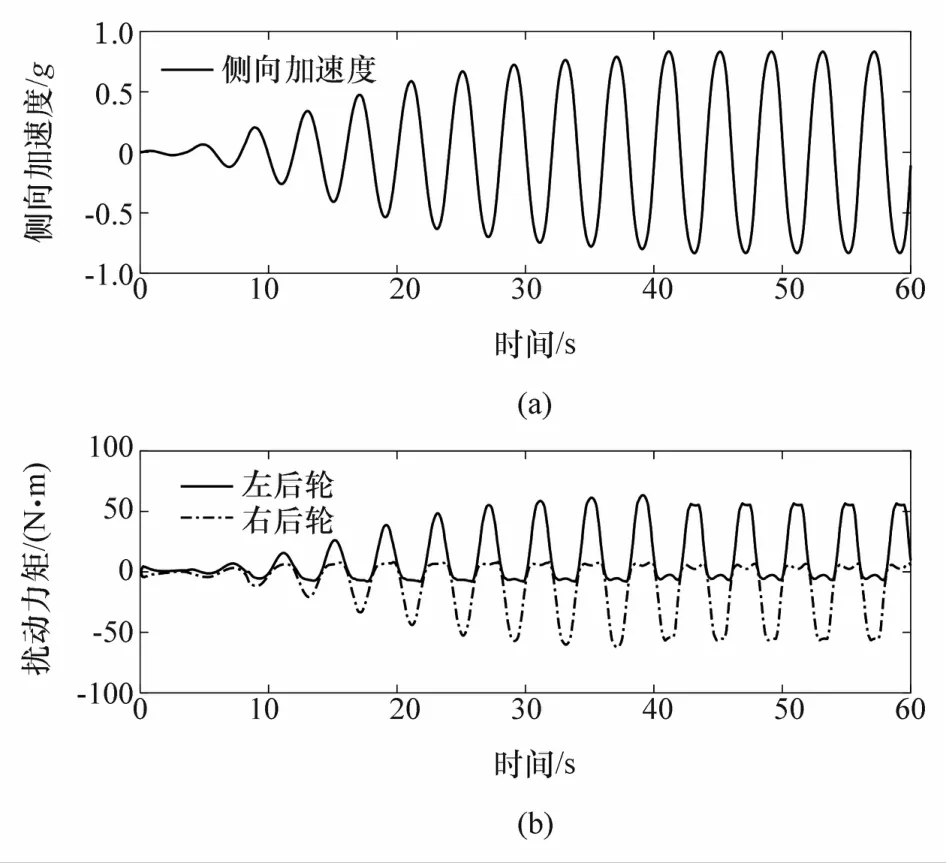
图10 侧向加速度曲线和左右后轮转向扰动力矩
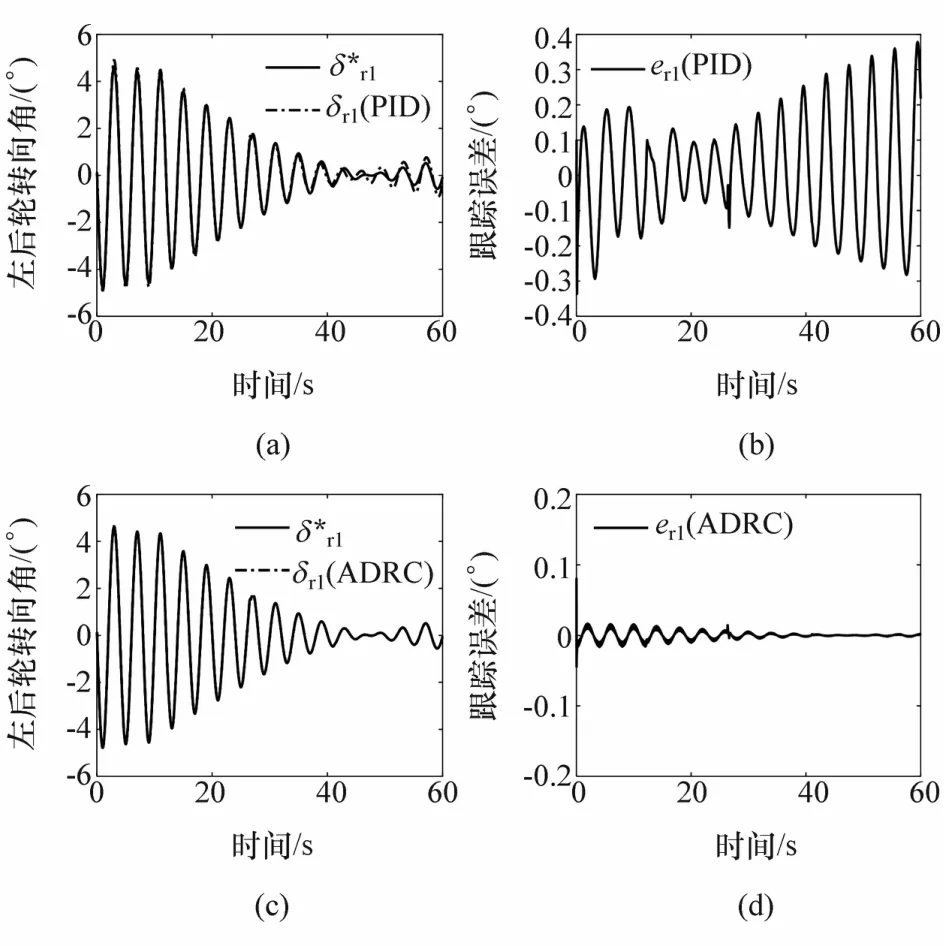
图11 左后轮转向角跟踪与误差曲线
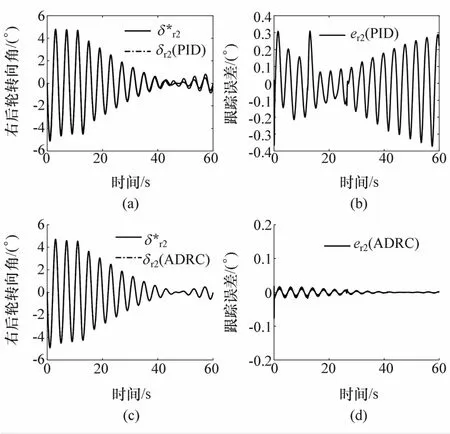
图12 右后轮转向角跟踪与误差曲线
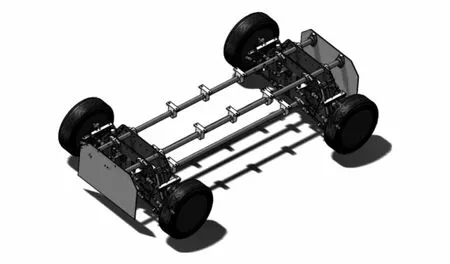
图13 四轮主动转向控制试验车平台

图14 主动转向角跟踪控制试验系统框图
4 实车试验和结果分析
本文中基于四轮主动转向控制试验车测试平台(图13)进行实车试验。试验平台动力系统采用四轮轮毂电机驱动,悬架部分采用独立式双横臂悬架。后桥转向部分采用本文中讨论的主动转向机构,控制系统包含执行电机、转向控制器、位置传感器、供电电池。图14为主动转向角跟踪控制试验系统框图。
控制系统采用自动代码生成技术,将本文中提出的控制算法自动生成C代码并嵌入到转向控制中,控制器主芯片选择ST公司的F405系列单片机。电机控制PWM调制频率20 kHz,控制算法控制周期2 ms。
试验工况选择静态原地转向工况,输入目标跟踪角幅值为45°、周期5 s的正弦曲线。分别采用本文中设计的改进ADRC方法和传统的PID方法进行试验。本文中选择其中一个后轮的转向试验数据进行分析,图15为改进ADRC控制下左后轮正弦角跟踪工况曲线图,图16为PID控制下左后轮正弦角跟踪工况曲线图。对比图15和图16的试验结果可以看出,采用改进ADRC方法最大跟踪角度误差小于0.5°,而采用传统的PID方法最大跟踪误差接近1°,采用本文中提出的方法控制精度提高了50%,相比PID,改进ADRC的方法跟踪速度更快,角度跟踪误差更小,且对不确定扰动具有较强的抗干扰能力。值得说明的是,由于试验传感器精度以及采样速度限制,实车试验的跟踪误差相比仿真试验的误差偏大。
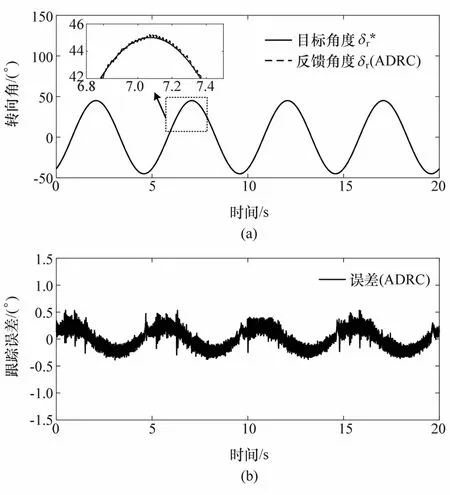
图15 改进ADRC控制下左后轮正弦角跟踪曲线图

图16 PID控制下左后轮正弦角跟踪曲线图
5 结论
(1)通过对本文中提出的基于电控束角杆的主动后轮转向机构的分析,并考虑主动后轮转向系统的非线性和不确定性,建立了含扰动的主动后轮转向机构2阶非线性动力学模型。
(2)为提高在不确定扰动工况下,后轮执行器转向角跟踪控制的精度和鲁棒性,设计了改进自抗扰控制器的主动后轮转向跟踪控制系统。
(3)通过多种工况的仿真和试验,所设计的主动后轮转向机构及控制算法能实现主动后轮转向角高精度控制,且相比传统的PID控制方法,具有更高的控制精度,更快的响应速度,较强的抗干扰能力和鲁棒性。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
上海师范大学学报·自然科学版(2022年3期)2022-07-11
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年7期)2021-08-13
小学生学习指导·爆笑校园(2019年6期)2019-09-10
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
发明与创新·中学生(2017年7期)2017-07-10
红蜻蜓(2015年11期)2016-02-02
湖南师范大学学报·自然科学版(2014年5期)2014-11-14