基于极化特征识别的地貌识别策略*
2020-08-10 00:59谢景海贾祎轲卢诗华苏东禹
火力与指挥控制 2020年6期
谢景海,孙 密,郭 嘉,贾祎轲,卢诗华,苏东禹
(国网冀北电力有限公司经济技术研究院,北京 100038)
0 引言
早在20 世纪40 年代,国内外众多学者就已经发现:当电磁波照射目标时会出现变极化效应,即回波的极化状态相对于入射波会发生改变。这种变化是由目标的姿态、尺寸、结构、材料等物理属性引起的,因此,可将目标视为一个“极化变换器”[1]。经过多年的研究与发展,目标极化信息的应用可对探测器的目标检测、识别跟踪、成像、抗干扰等几乎所有功能都能带来革新和提升[2],因而极化信息的获取与处理在气象预警、战场侦察、精确制导和抗杂波干扰等各个领域都备受重视。
极化探测器利用电磁波的矢量特性,获得目标的极化散射响应特征,对目标的介电常数、几何形状、空间取向等物理属性十分敏感,因此,可以增强极化探测器对目标物理属性的获取能力[3]。利用极化特征进行目标识别的方法主要包括:直接利用目标极化散射矩阵进行目标识别;根据目标极化矩阵衍生的新型极化参数集进行目标识别;极化信息与现有其他识别技术相融合的目标识别;通过极化重构与已知目标极化数据库对比进行目标识别。
上述极化目标识别方法已经在不同的领域、平台上进行了验证与实现,取得了不俗的识别效果。王福友[4]等人提出了一种新的组合极化不变量特征(功率矩阵的迹与行列式的比值),用于雷达目标识别,将提取到的不变量特征经过支持向量机(Support Vector Machine,SVM)分类器,最终获得基于双特征、三特征的识别分类结果;可以有效地将弹头与球形诱饵、圆柱诱饵区分,平均识别准确率达90%和80%以上;但由于该方法需要对极化不变量特征进行训练,因而使得算法响应时间较长。邵仙鹤[5]等人针对未知和时变的杂波环境,在目标极化状态已知的情况下,探讨了极化域目标识别问题,提出一种基于复加权的目标极化识别方法;并在全极化雷达垂直、水平双通道接收系统中,对目标回波提取极化特征,识别结果正确率较高。但由于战场环境中大多区域的极化状态并不能获得,因此,该方法在实际的应用过程中具有一定的局限性。Beauchamp[6]针对地面风力涡轮机,利用双极化雷达散射特性进行识别,详细分析了目标的运动特性、结构特性,并对双极化接收、信号处理算法进行了严格推导,根据实际获得的目标极化散射矩阵与已建立的极化库相匹配,成功将地面风力涡轮机识别出来。该方法的实现是基于确定的待测目标详细的分析之后实现的;对于未知的、非合作目标而言,探测端无法获取完整的目标信息,因此,对于战场目标识别十分不利。
针对空载平台而言,因其有限的平台空间、复杂的运动状态,再加之较短的飞行时间,使得某些成熟的极化目标识别技术、算法很难在该平台上正常工作。目前,新型精确制导弹药往往搭载平板天线或者探测器,在飞行过程中对地面或地面目标进行实时探测,以发挥弹药的最大作战效能。对于弹载探测的研究也层出不穷,主要集中在对于弹载探测器的设计以及弹载探测策略两方面。徐瑞[7]对弹载嵌入式实时雷达信号处理系统的设计方案进行了详细的研究,提出了一种标准化、模块化、可扩展的系统总体设计方案,选择基于VPX 平台构架的弹载雷达信号处理系统进行设计与实现,信号预处理模块采用了Virtex6 处理器,数据处理模块采用了TMS320C6678 处理器,主控接口模块和数据采集模块选择了Kintex7 处理器,同时选择了Rapid IO 作为模块之间的互联总线、PCI Express 作为补充的互联总线。在一定程度上解决了弹载雷达接收信号并进行处理的实时性问题,同时该系统为模块化结构,易于维修与优化,具备一定的实际应用价值。陈勇[8]等人针对弹载合成孔径雷达的成像问题进行了研究,提出了一种基于分数傅里叶变换的SAR 成像算法,由于在成像过程中,对每一距离向和方位向的回波信号进行独立的局部最优处理,因此,更适合低空飞行平台的非线性飞行轨迹,提升了雷达SAR 的成像性能,能够用于目标识别。宋立众[9]等人研究了一种基于极化分集阵列的主动式相控阵雷达及其信号设计问题,设计的雷达发射信号脉冲内部采用线性调频或者相位编码脉冲压缩信号,而脉冲间采用时域波形和极化状态的同时捷变,并建立了双极化发射信号的数学模型,该体制的制导雷达具有良好的抗移频干扰以及延时干扰,提高了雷达的抗干扰能力。
1 问题描述
平台在飞行末端开启极化探测器,用于测量实时高程。传统的探测器利用回波的时间延迟计算高程,但是对于某些地貌而言,这种传统的测量方式往往会带来较大的测高误差。

图1 茂密的高大树林
如图1 所示,当探测区域为密集高大树林时,毫米波探测器所截获的回波信号基本上源于树木的顶端组成的近似平面,则树木的高度即成为了探测器测量高程的误差。对于近感探测要求在10 m~30 m 之间的平台,这种误差就显得十分巨大,回波信号示意图如图2 所示。
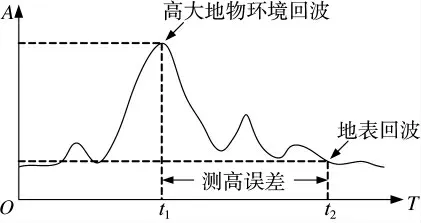
图2 探测器截获回波示意图
为避免平台在上述环境下的测量误差,本文提出一种基于最优投影的地貌识别算法,利用极化信息对探测区域内的地物环境进行有效识别。
2 极化最优投影地貌识别算法
极化信息作为回波信号的又一可利用信息,已经广泛应用于目标探测与识别领域。根据Krogager[10]的相关研究成果,任一目标的极化散射矩阵都可以分解成球、二面角和螺旋体3 种成分,根据目标的组成成分的差异,达到目标识别的目的。但是,对于平台毫米波探测器而言,探测范围内的地形较为复杂,多为山地、丘陵等,如图3 所示。
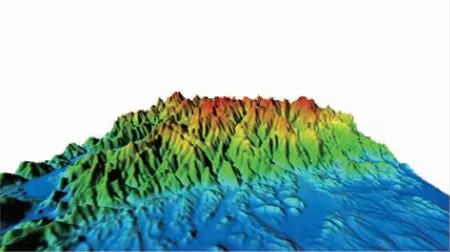
图3 探测器探测区域内地貌示意图
对于图3 所示的地貌特征,分解为球、二面角和螺旋体3 种结构之后,所得地貌的组成成分差异较小,难以区分地貌属性。因此,需要对组成成分标准体进行改进,用于扩大差异性,有利于实现地貌属性确定。
结合Krogager 的思想,本文提出一种基于极化最优投影的地貌识别(Polarized Optimal Projection Landscape Recognition,POP-LR)算法,并建立由四棱锥、圆台、球组成的投影基,将地表极化回波信息投影到上述投影基内,得到最优投影条件下的不同地貌“坐标”(由不同基底投影距离组成),从而判断地形属性,完成地貌识别。
2.1 散射矩阵旋转不变参数
在极化探测器目标识别过程中,目标结构特性成为了关注的焦点。因此,需要建立与位置、观测角度无关的极化特征量。在单站雷达中如果互易定理成立,目标散射矩阵为一轴对称矩阵,可表示为:

其中,Shv=Svh,下标“ij”表示j 极化方式发射,i 极化方式接收;h 表征水平极化,v 表征垂直极化。当入射角度发生改变时,目标散射矩阵可以表示为:



由式(4)可以看出,当散射矩阵旋转某一角度θ时,得到的新的散射矩阵与原矩阵具有相同的上三角矩阵,因此,可以将其作为旋转不变参数进行下一步分析。
2.2 散射矩阵的最优投影
为了衡量探测区域地貌特征与基底之间的相似程度,引入散射矩阵的最优投影距离。首先定义度量向量:


由2.1 节理论推导易知,该度量向量k 为旋转不变向量,可用于散射矩阵之间的相似度分析。若回波散射矩阵为S1、某基底散射矩阵为S2,且二者的度量向量分别为k1、k2。则定义S1向S2最优投影距离(Optimal Projection Distance,OPD)可表示为:

2.3 新投影基中各基底分析
由于实际探测过程中,探测区域内的地貌特征多由类似图3 所示地貌特征组成,因此,建立以四棱锥、圆台、球组成的新的投影基。本节就针对新投影基中各基底进行分析,并求解与波束擦地角相关的旋转不变参数。设探测波束高低角为φ,方位角为。
定义基底1:四棱锥(Rectangular Pyramid,RP),其中各底边与高度均相等,即侧面与每一底面呈45°夹角。
在探测波束的范围为高低0°~60°、方位-60°~60°进行不变参数求解不同基底的旋转不变参数矩阵,远场设置如图4 所示。
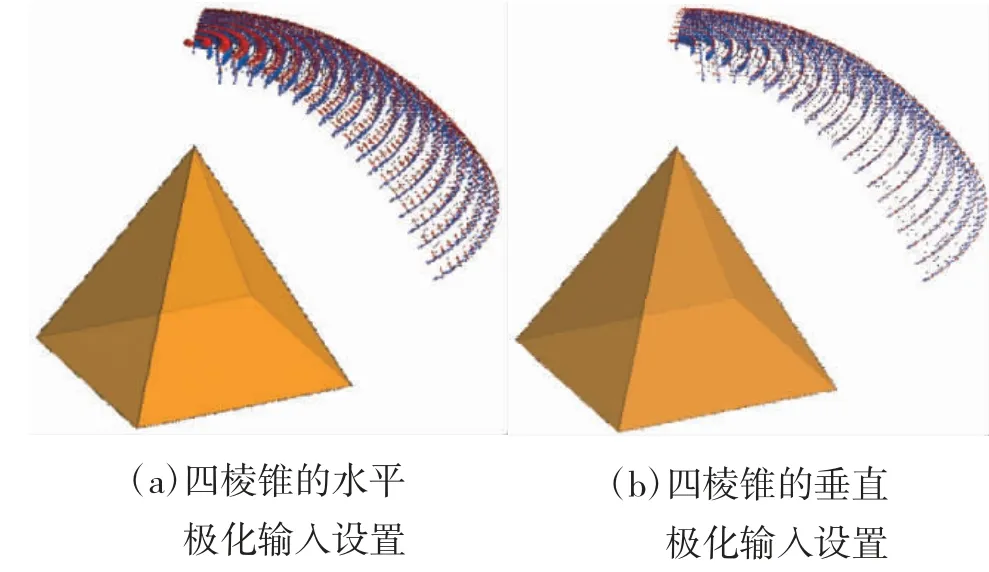
图4 探测范围内基底1 水平、垂直极化输入
按照上述输入设置,在每一角度下求解该基底的散射矩阵,记为:

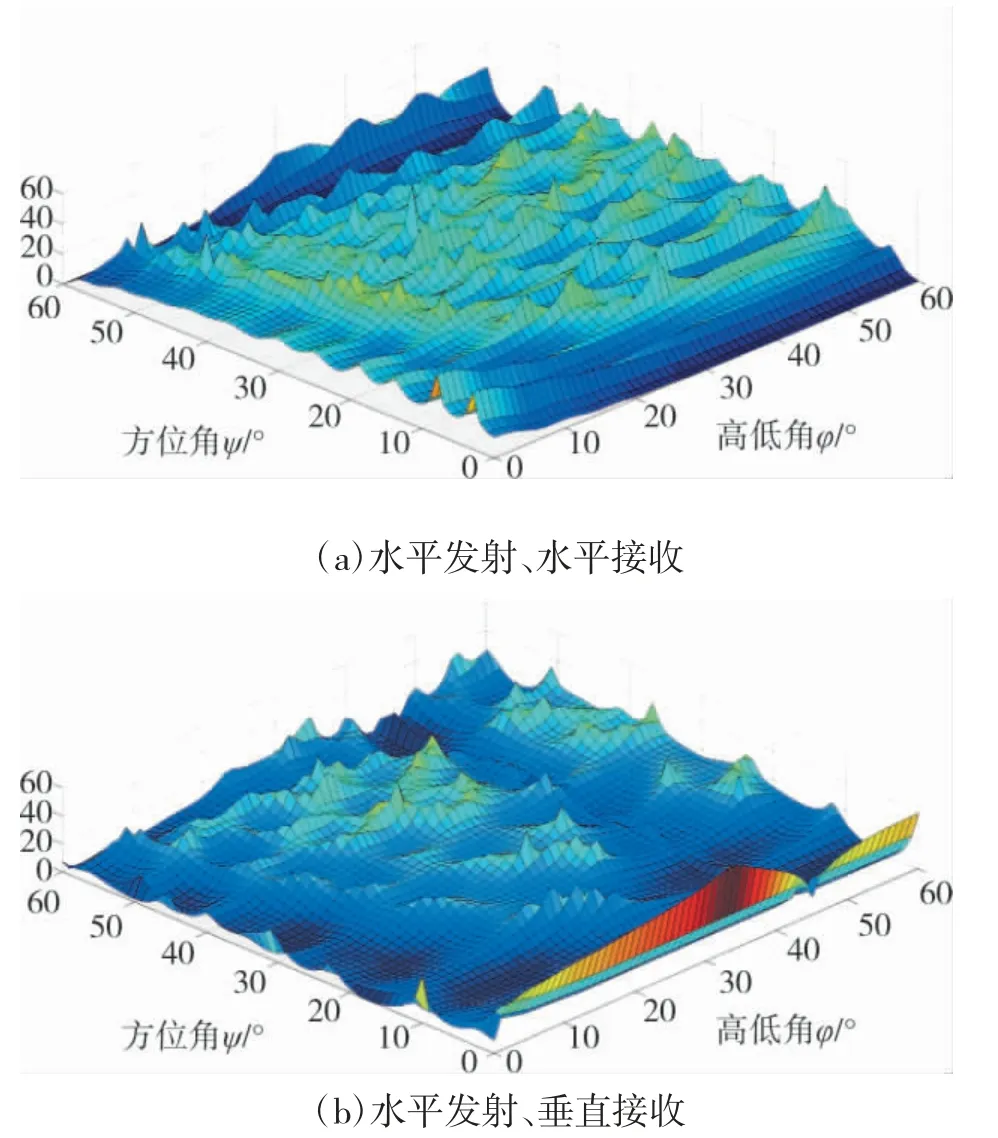
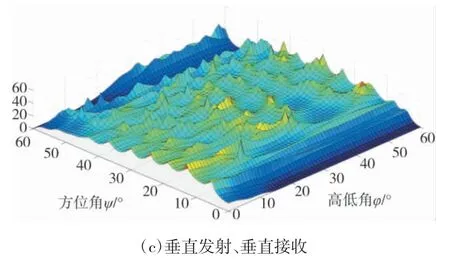
图5 全方位不同极化条件下的散射矩阵元素求解结果
通过求解不同角度条件下的基底极化散射矩阵,就能够得到不同条件下的度量向量,用以解算目标区域地貌特征与该基底不同角度下的距离,从而判断其相似程度。

在探测波束的范围为高低0°~60°进行不变参数求解不同基底的旋转不变参数矩阵,远场设置如图6 所示。
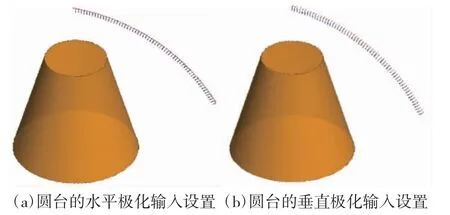
图6 探测范围内基底2 水平、垂直极化输入
按照上述输入设置,在每一角度下求解该基底的散射矩阵,记为:

同理,通过求解不同波束高低角度下的基底RCS,就能够得到不同条件下该基底的度量向量,用以解算目标区域地貌特征与该基底不同角度下的距离,从而判断其相似程度。
定义基底3:球(Spheroid)。
根据文献[11]中对于球体散射矩阵的分析,可得其散射矩阵为:

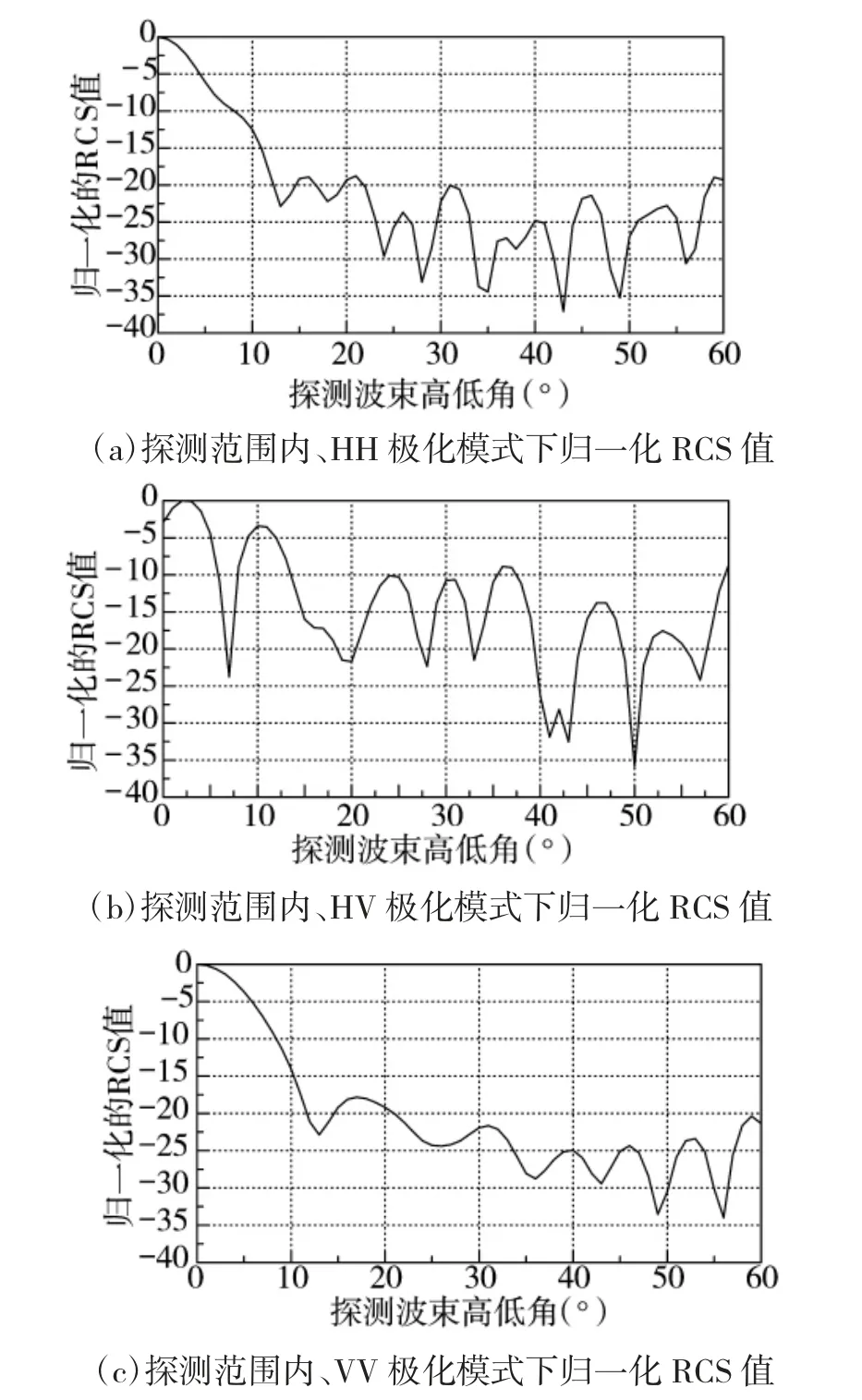
图7 不同极化条件下的RCS 求解结果
从而,可以求解出球体的度量向量为:

因此,在任意探测角度下球体散射矩阵以及度量矩阵都唯一确定,本文不再进行建模分析。
2.4 地形起伏度判定
地形起伏是制约探测器测量距地表高程的重要因素,极化探测地貌识别就是为了确定所探测区域内地形起伏度,从而用以评价探测器测量高程的准确度。在此,结合本文所提地貌识别算法,提出一种地形起伏度的判定方法。
根据文献[12]中所提出的地貌识别分类方法,地表起伏度用区域内高程值的最大值与最小值之间的差值来描述,并记为探测区域的起伏因子。针对低空飞行平台探测器而言,探测区域内起伏度的统计量可以通过3 个基底综合表示。由最优投影可以得到在不同基底下取最优值的探测角度值。根据不同的基底特性,分别设定地形起伏度判定方法。对于基底3,起伏度为定值,则基底3 的起伏度为1,记为:


其中,dis()为距离函数,距离函数可以写为:

不同极化模式下的幅值表征了该区域内地形的轮廓(形状)特征,并且不同的幅值组合能够唯一确定探测范围内的地貌特征,类似于“坐标”。本文在数据处理过程中的最优投影“坐标”总可以表示成为:


2.5 POP-LR 算法步骤
基于最优投影的极化探测器地貌识别算法的基本思想为:利用最优投影求解探测范围内地形的“成分”,通过所得权值分析探测区域内地形形状特征,具体步骤如表1 所示。
表1 POP-LR 算法步骤
3 实验验证
利用“地理空间数据云”提取出的中越边境相关地表数据(22°54’N 至232°08’N,1 052°29’E至1 052°49’E)进行算法验证实验,如图8 所示。
图8 提取区域的俯视高程图
如图8 所示,该区域内的最高海拔为1 682 m,以丘陵为主,未有大面积的平坦地段,该范围为平台飞行区域。本文仅利用该地貌中的一小部分作为探测波束覆盖范围,用以验证所提出的POP-LB 算法的可行性与优越性。
将探测波束范围内的回波进行处理,得到不同极化模式下的回波信号幅度,由此可以得到波束探测范围内地形“坐标”与不同探测俯仰角之间的关系如图9 所示。
图9 不同探测俯仰角下的地形“坐标”

表2 不同角度下目标区域的度量向量、最优投影及起伏度结果
由得到的不同“坐标”值,根据式(5)与式(6)求解出目标区域的度量向量,并由式(7)计算得到不同角度下目标区域在各个基底下的最优投影,得到的结果如表2 所示。最优投影“坐标”表征了该区域的“成分”,也可以理解为上述3 种不同基底的权值。
由表2 可知,该区域内存在大量的类似基底1的成分,因此,该探测区域的起伏较大,从起伏度结果也可以看出。通过地貌识别算法能够定量计算出该区域的起伏度,从而能够评价高程测量结果,并利用相应的误差补偿方法减小甚至消除误差。
为体现该算法的优越性,选取两种不同地形:平坦、尖峰,分别进行定量识别,用以体现本文算法的优越性。最终求解得到的平坦地形、尖峰地形的最优投影,如表3 所示。
表3 平坦地形以及尖峰地形的最优投影及起伏度
由表3 可以看出,不同类型的地形所解算得到的起伏度数值差异很大,能够有效区分平台飞行过程中所处地形类型,从而为精确测高提供先验知识,保证高程测量的准确性。
4 结论
本文提出一种基于最优投影的极化探测器地貌识别策略。定义了利用目标散射矩阵特征值构成的特征参数、投影基底,并结合Krogager 关于目标散射矩阵分解的相关思想,建立带参数的标准散射体旋转不变矩阵,将探测区域内的地貌极化散射矩阵投影至标准基底,得到目标散射矩阵在每一标准基底的最优投影值,并进一步判定该地貌属性,为探测器准确测高提供先验知识,实验验证了该策略的可行性与优越性。
猜你喜欢
军事文摘(2022年8期)2022-05-25
航天电子对抗(2022年2期)2022-05-24
新高考·高一数学(2022年3期)2022-04-28
中国银幕(2022年4期)2022-04-07
北京航空航天大学学报(2021年9期)2021-11-02
雷达学报(2021年1期)2021-03-04
船海工程(2020年2期)2020-06-08
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
新高考·高二数学(2018年1期)2018-11-20