主从式编队航天器连通性保持与碰撞规避
2020-08-11 06:18薛向宏岳晓奎袁建平
宇航学报 2020年7期
薛向宏,岳晓奎,袁建平
(1. 西北工业大学航天学院,西安 710072;2. 航天飞行动力学技术重点实验室,西安 710072)
0 引 言
相比于传统的单个航天器,编队航天器具有灵活性好、可靠性高、成本低等优势[1-2],因此在合成孔径雷达、重力场测量、天基干涉仪和分离模块航天器等领域有着广泛的应用[3-4]。文献[5]对目前已有的航天器协同控制方法进行综述,主要包括主从式方法、基于行为的方法、虚拟结构方法、循环追踪方法、人工势函数方法、代数图方法和非接触式方法等。
航天器编队过程中的碰撞规避是完成其他一切任务的基础。在执行跟踪和编队构型保持等任务时,必须防止航天器之间的碰撞规避。文献[6-8]对编队协同过程中的碰撞规避问题进行了研究,分别利用基于行为的方法[6-7]和势函数法[8]实现了编队过程中航天器之间的碰撞规避。文献[6-7]采用的零空间法是一种典型的基于行为的编队协同控制方法。该方法将低优先级任务的速度投影到高优先级任务的零空间中得到各个航天器的期望轨迹,然后再设计控制器对期望轨迹进行跟踪。虽然零空间法能够灵活地应对不同的任务要求,但是该方法得到的期望速度可能不连续,这会导致在某些时刻对控制器的输入需求为无穷大。文献[8]利用势函数研究了驱动非完整时的编队协同控制问题。势函数法由于原理简单,且易于和控制器相结合,在编队协同控制中有着广泛的研究。
文献[9-14]针对主从式航天器编队设计了分布式协同控制器。文献[9]通过利用势函数与非线性观测器相结合,实现了高精度的分布式卫星协同控制。文献[10]针对双星编队过程中主航天器轨道参数、轨道位置和轨道机动信息未知的情况,提出了一种自适应的控制方法。文献[11-12]研究了主从式航天器编队中的碰撞规避问题,但是文中假设所有航天器的状态都是全局已知的。文献[13]针对主从式卫星集群系统的空间构型长期保持问题提出一种控制算法。文献[14]以线性双积分系统的循环追踪算法为基础,设计了航天器编队六自由度协同控制的循环追踪算法。上述文献都没有考虑航天器之间的通信距离约束,都假设航天器之间的通信网络在整个编队过程中都是连通的。但是,由于航天器之间通信距离有限,编队过程中航天器之间的相对位置的变化可能破坏航天器通信网络的连通性。因此,需要在卫星协同控制中考虑通信网络的连通性。文献[15]利用势函数给出了一种同时考虑航天器之间碰撞规避和通信网络连通性保持控制方法,但是该研究中没有考虑存在主航天器的情况。
目前少有文献同时考虑主从式航天器通信网络连通性保持和航天器之间的碰撞规避问题。本文针对主从式航天器系统,将势函数、滑模控制和非线性干扰观测器相结合,提出了一种分布式的航天器协同控制方法。具体来说,首先利用势函数分别设计了排斥势函数和吸引势函数,分别用于实现航天器之间的碰撞规避以及通信网络的连通性保持。其次,针对主航天器速度仅对部分从航天器已知的情况,设计了分布式的速度观测器。此外,利用干扰观测器对空间环境中存在的J2项摄动和大气拖拽等干扰进行估计,从而实现高精度的编队协同控制。最后,利用李雅普诺夫函数和仿真分析校验了所提出方法的有效性。
1 相关基础
1.1 相对动力学方程
(1)
式中:

1.2 图 论



1.3 通信网络初始化
首先对通信网络进行初始化。航天器i的安全区域和通信区域在二维平面的投影如图1所示,其中δij表示航天器i和j之间的安全距离,Δ为航天器之间的通信距离。由图1可知,航天器i与航天器j之间发生了碰撞,航天器i与航天器l之间无通信,航天器i与航天器k之间存在通信连接且无碰撞发生,称航天器i与航天器k之间存在一条边。

图1 安全和通信区域二维示意图Fig.1 Two-dimensional illustration of collision and communication areas
根据上述模型,从航天器之间的邻接矩阵元素可以定义为
(2)

(3)
式中:pi 0=pi-p0,p0表示主航天器的位置矢量。由上述定义可知从航天器之间的通信网络是无向的,主航天器与从航天器之间的通信连接是有向的。
1.4 问题描述
本文的主要目的是实现在主航天器的状态仅对部分航天器已知、空间干扰未知条件下的主从式航天器系统分布式协同控制。在编队过程中防止航天器之间发生碰撞,且保证航天器通信网络的连通性。上述描述可以叙述为如下形式。
问题 1:考虑由式(1)描述的航天器系统,假设初始时刻从主航天器到任意从航天器都存在着至少一条有向路,设计分布式协同控制器和干扰观测器,使得如下结论成立:
(1)对于∀t≥0,主航天器到任一从航天器都存在着有向路。
2 势函数和控制器设计
2.1 人工势函数设计
为了实现通信网络的连通性保持和航天器之间的碰撞规避,设计如下人工势函数
(4)

各部分势函数具有如下性质:
(1)ψij是对称函数,且满足▽piψij=-▽pjψij。其中,▽piψij表示函数ψij在向量pi方向上的梯度。


2.2 主航天器速度恒定
本节研究主航天器速度恒定时的航天器编队控制器设计。为了便于后续分析,定义如下辅助参数
(5)

(6)
设计如下分布式协同控制器、速度估计器和干扰观测器
(7)
(8)
(9)

证. 对式(5)求导并将式(1)和式(7)代入可得闭环方程
(10)
定义如下李雅普诺夫函数
V=V1+V2+V3
(11)
式中:
(12)
(13)
(14)
(15)
对式(13)求导可得:
(16)

(17)
(18)
将式(9)和式(18)代入式(14) 并求导可得
(19)
式(15)、式(17)和式(19)相加,并将式(8)代入可得
(20)

(21)

2.3 主航天器速度变化
第2.2节研究了主航天器速度恒定时,编队卫星的协同控制,本节进一步考虑当主航天器速度动态变化时的航天器编队控制器设计。首先对主航天器的加速度做出如下假设。

设计如下控制器和主航天器速度估计
(22)
(23)
式中:sgn(·)表示符号函数。
证. 将式(1)和式(22)代入式(2) 并求导可得闭环方程
(24)
考虑李雅普诺夫函数
V=V1+V2+V3
(25)
对式(25)求导并代入式(24)可得
(26)
将式(23)代入式(26)可得
(27)

(28)
假设图的通信网络只在时刻t=t1,t2,…发生变化,其他时间段固定不变。对时间t用归纳法:
(29)

(30)

3 仿真校验

di=[5,5,5]T·sin(2πnct+iπ/10)
(31)
式中:nc为参考轨道平均角速度。
为了实现主从式航天器的协同控制,排斥势函数、吸引势函数和编队势函数的设计与文献[17]类似
(32)
对上述势函数分别求偏导可得
(33)
容易验证上述势函数是连续的,且满足第2.1节中势函数的性质。
3.1 主航天器速度恒定


表1 航天器的位置Table 1 The initial position of spacecraft

图2 通信网络Fig.2 The communication graph
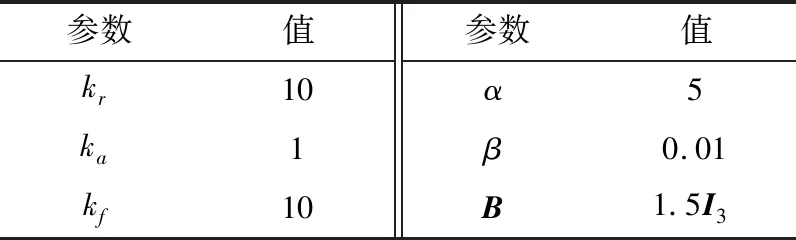
表2 控制器参数Table 2 Parameters of controller

表3 控制器参数[12]Table 3 Parameters of controller[12]
图3~4分别给出了从航天器之间的距离、从航天器和主航天器之间的距离随时间变化的曲线,其中实线表示航天器之间的通信距离。图3(a)和图4(a)为采用文献[12]中控制器得到的仿真结果,图3(b)和图4(b)为采用本文提出控制器得到的仿真结果。由图3(a)可知,在编队过程中三个从航天器之间的距离在t∈(10,100) s时,其距离均大于航天器之间的通信范围。因此,在实际情况下编队通信网络被破坏,航天器之间相互失去联系。作为对比,图3(b)中从航天器1和2以及航天器2和3之间的距离始终小于航天器的通信范围。因此,航天器之间的通信网络一直是连通的,航天器之间可以利用通信网络实现最终的编队。由图4可知在两种情况下,所有航天器都能够实现期望构型。图5和图6分别为从航天器和主航天器速度误差以及从航天器加速度随时间变化的曲线。图5表明本文提出的分布式协同控制算法能够使得所有从航天器与主航天器之间的速度跟踪误差最终趋于零。由图6可知从航天器的加速度最终也趋于零。

图3 从航天器之间的相对距离Fig.3 The distance between the followers
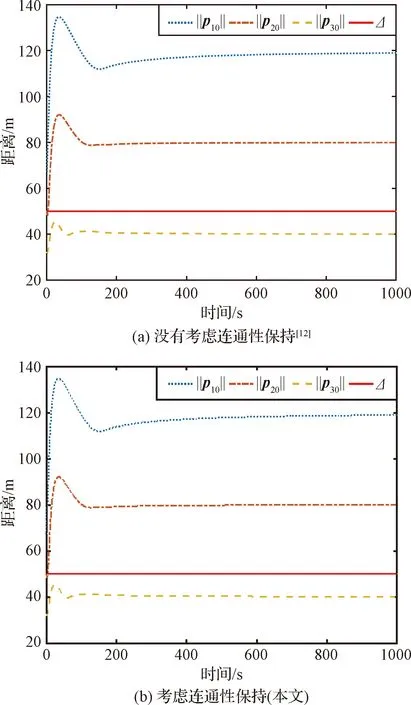
图4 从航天与主航天器之间的距离Fig.4 The distance between the followers and the leader

图5 速度跟踪误差Fig.5 The velocity tracking errors

图6 从航天器的加速度Fig.6 The acceleration of the followers
为了说明本文中干扰观测器对航天器编队精度的影响,将仿真时间延长到12000 s。图7为航天器1所受的干扰和干扰估计的差值随时间变化的曲线图。由图7可知干扰观测器精度为10-5m。图8对比了在有无干扰观测器的情况下,航天器1和航天器2之间的距离与期望距离差的精度。由图8可知,在无干扰观测器的情况下,编队跟踪误差精度为10-2m,而采用了干扰观测器之后,跟踪误差精度提升到了10-5m。

图7 干扰估计差值Fig.7 The disturbance estimation errors

图8 航天器1和航天器2之间的距离跟踪误差Fig.8 The distance tracking error between spacecraft 1 and 2
3.2 主航天器速度变化


表4 航天器的位置Table 4 The initial position of spacecraft

图9 通信网络Fig.9 The communication graph
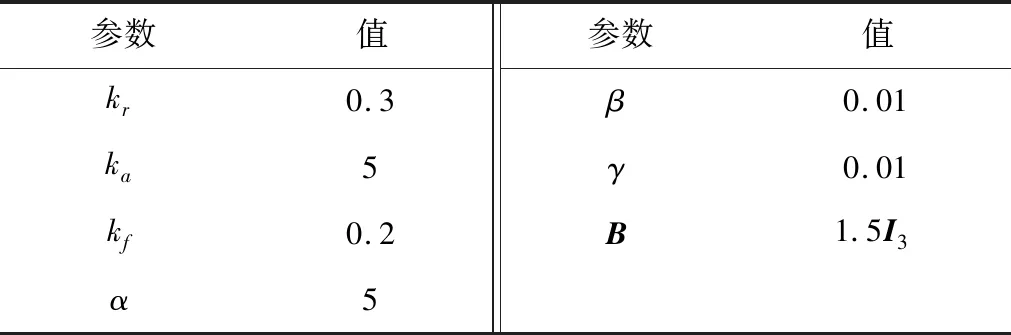
表5 控制器参数Table 5 Parameters of controller

表6 控制器参数[12]Table 6 Parameters of controller[12]
图10~11分别给出了从航天器之间的距离、从航天器和主航天器之间的距离随时间变化的曲线,其中实线表示航天器之间的通信距离。图10(a)和图11(a)为文献[12]中的没有考虑通信网络连通性的仿真结果,图10(b)和图11(b)为本文的仿真结果。由图10可知,在两种情况下,从航天器1和2以及从航天器2和3之间的距离都小于航天器之间的通信距离,因此可以实现从航天器之间的期望构型。由图11(a)可知,在文献[12]中的控制算法作用下,当t=100 s时,所有从航天器与主航天器之间的距离都大于通信距离,这就导致了所有从航天器不能获得主航天器的信息,从而不能实现对主航天器的速度和位置跟踪。作为对比,由于采用了吸引势函数,图11(b)中从航天器2和主航天器之间的距离始终小于航天器的通信范围。因此,航天器之间的通信网络一直是连通的,从航天器可以实现对主航天器的速度和位置跟踪。图12和图13分别为从航天器和主航天器速度误差以及从航天器加速度随时间变化的曲线。图12表明尽管主航天器的速度是变化的,所有从航天器的速度都能够与主航天器的速度达到一致,其速度跟踪误差为零。图13表明从航天器的加速度最终收敛到零。

图10 从航天器之间的相对距离Fig.10 The distance between the followers

图11 从航天与主航天器之间的距离Fig.11 The distance between the followers and the leader

图12 速度跟踪误差Fig.12 The velocity tracking errors

图13 从航天器的加速度Fig.13 The acceleration of the followers
4 结 论
对于主从式编队系统,航天器之间通信网络的连通性是实现航天器分布式编队协同的基础。本文利用势函数和干扰观测器分别给出了主航天器速度恒定和变化时候的分布式协同控制器。该方法能够在航天器之间通信距离有限的约束下,且航天器之间通信网络在初始时刻连通时,能够保证该动态网络在编队协同控制过程中始终连通。从而保证了航天器编队任务的顺利实施。
猜你喜欢
国际太空(2022年7期)2022-08-16
火力与指挥控制(2022年6期)2022-07-25
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
国际太空(2021年11期)2022-01-19
计算机仿真(2021年3期)2021-11-17
北京航空航天大学学报(2020年10期)2020-11-14
航空发动机(2020年3期)2020-07-24
航空知识(2001年5期)2001-06-12