
侧向驾驶辅助系统发展现状及技术趋势
2020-08-13 06:56马骏昭
汽车实用技术 2020年14期
马骏昭
摘 要:先进驾驶辅助系统(Advanced Driving Assistance System,ADAS)是智能网联汽车(Intelligent and Connected Vehicle,ICV)现阶段发展的重要力量,文章详细列举分析了侧向驾驶辅助的发展现状,包括弯道速度预警、盲区监测、车门开启预警、变道碰撞预警、车道偏离预警以及车道保持辅助和交通拥堵辅助。并以市场和量产化为导向,分析技术趋势。
关键词:智能网联汽车;侧向驾驶辅助;发展现状;技术趋势
中图分类号:U471.1 文献标识码:A 文章编号:1671-7988(2020)14-20-04
Abstract: Advanced driving assistance system (ADAS) is significant for current development of intelligent and connected vehicles(ICV). This article expounds the state-of-the-art of lateral advanced driving assistance system, which including corner speed warning, blind spot detection, door open warning, lane changing warning, lane departure warning, lane keep assistance and traffic jam assistance. Based on market and mass production., the technical trend is analysed.
Keywords: Intelligent and connected vehicl; Lateral driving assistance; State-of-art; Technical trends
CLC NO.: U471.1 Document Code: A Article ID: 1671-7988(2020)14-20-04
1 智能网联汽车发展简述
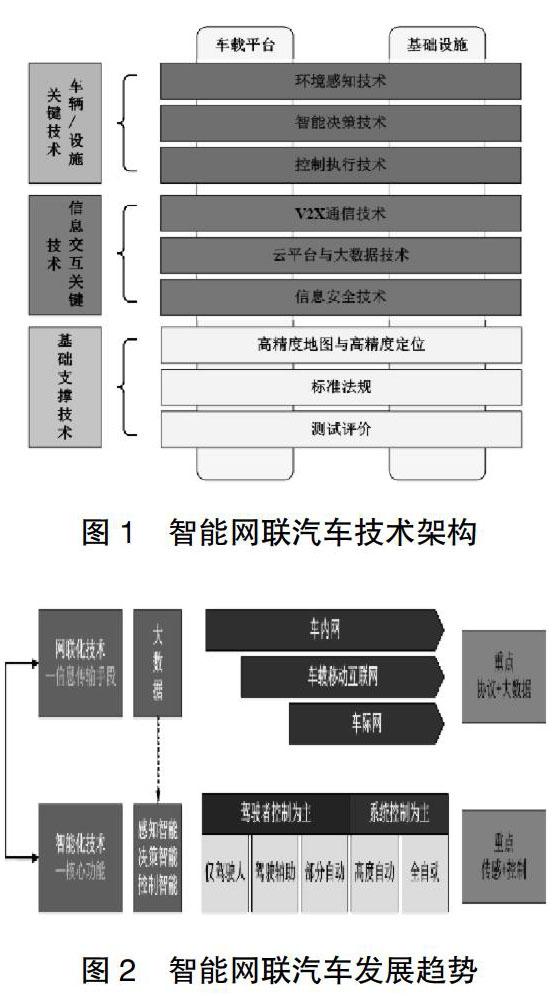
现如今,汽车产业经过一百多年的发展,已逐步由传统的行驶和运输工具,向交通运输体系中用户的智能移动终端转变。智能网联汽车成为转变中的新型汽车,智能网联汽车泛指可与通信网络智能信息交换,并且可进行自主决策控制的车辆[1],能够提升驾驶员的行车安全性、舒适性和高效性。智能网联汽车产业技术是多学科融合的,囊括了汽车制造业、通信服务业和交通基础设施等。因此,智能网联汽车产业基础可划分为“三横两纵式架构”[2],如图1所示。
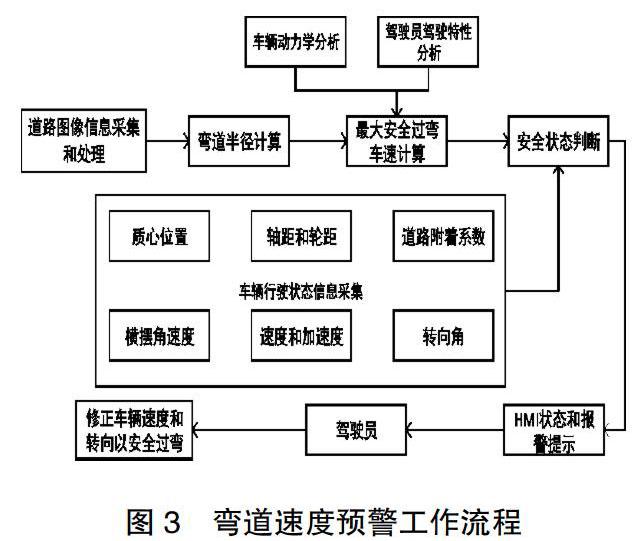
智能网联汽车在国家战略层面必将成为中国先进制造业的中流砥柱[2]。《中国制造2025重点领域技术路线图》中指出,将制定适合中国汽车产业的智能驾驶辅助标准,旨在加快发展高精度高抗扰能力的环境感知传感器,高智能化的决策芯片和高精准度高自适应性的控制执行机构。实现车辆高效、舒适、智能和个性化驾驶[3]。《智能网联汽车技术路线图》提出了总体发展目标,发展趋势如图2所示,到2020年,汽车辅助驾驶(Driver Assistance,DA)、部分自动驾驶(Partial Automation,PA)和有条件的自动驾驶(Conditional Automa -tion,CA)新车装配率超过50%;到2025年,汽车DA、PA和CA新车装配率超过80%,其中PA和CA级新车装配率达25%;到2030年,汽车DA及以上级别的智能驾驶系统成为新车标配。
2 侧向驾驶辅助系统发展现状
驾驶辅助功能从车辆运动方向上可以划分为纵向驾驶辅助和侧向驾驶辅助。以中国交通事故深入研究(CIDAS)数据库为基础进行分析,发现车辆的侧向运动较容易产生交通事故。主要的事故场景有:车辆偏离车道发生事故;车辆行驶与左侧盲区内的两轮车发生碰撞;车辆行驶与右侧盲区内的两轮车发生碰撞;车辆偏离车道后与前方车辆及两轮车发生碰撞;车辆行驶过程中与盲区内的车辆发生碰撞等5个场景。如车辆应用相应的侧向驾驶辅助系统,有助于大幅减少这些场景下的交通事故。以下将详细阐述侧向驾驶辅助中七个功能的发展现状。
2.1 弯道速度预警
弯道速度预警(Corner Speed Warning,CSW):对车辆状态和前方弯道进行监测,当行驶速度超过通过弯道的安全车速时发出警告信息[4]。
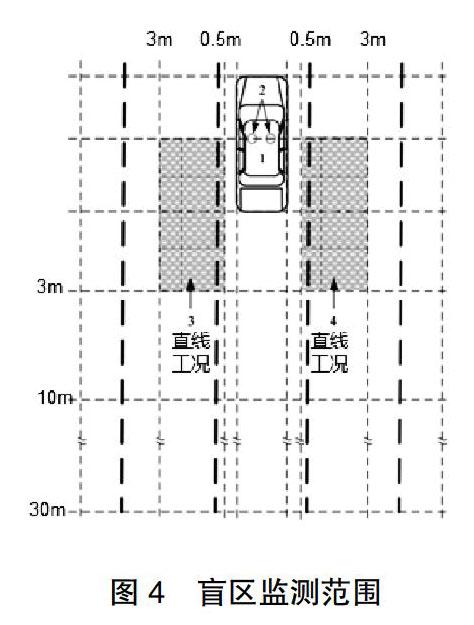
弯道速度预警系统的感知部件为高清摄像头和车载传感器,摄像头模块一般布置在汽车的后视镜上,该模块自带控制器,通过进行图像信息采集和处理获得前方道路参数。车载传感器采集车辆动力学参数,例如加速度、车速、横摆角速度和质心位置等;依据道路参数和车辆参数,系统算法会进行计算处理,得到道路的弯道半径和车辆安全车速边界值,从而判断车辆当前状态是否存在风险。当控制单元判断当前车速高于安全车速边界值,如果判定结果是车速过高,系统将会对驾驶员發送预警信息,例如声光报警和方向盘振动等,引导驾驶员及时采取制动或者转向,避免车辆甩尾或侧倾事故的发生。为实现车速预警的功能,弯道速度预警系统一般由道路识别模块、安全车速计算模块、安全状态判断模块和人机交互模块四部分组成,其主要工作流程如图3所示。
弯道安全临界车速与车辆转弯半径直接相关,当通过计算道路曲率得到车辆弯道转弯半径,结合车辆动力学参数并根据一定的算法计算可得出车辆临界安全车速,因此,对于不同类型的车辆,测量弯道半径是计算车辆临界安全车速的关键。近年来,出现了利用全球定位系统(GPS)、激光、超声波、红外等技术来测量弯道半径的方法,但是,视觉信号仍然具有成本低、采集信号范围宽、用户友好性高等先天优势,尤其是在车道图像的检测识别上具有明显优势。随着计算机运算速度的提高,数字图像处理精度高,再现性好,灵活性高和适用面宽的优点将愈发凸显。
2.2 盲区监测
盲区监测(Blind Spot Detection,BSD):實时监测驾驶员视野盲区,并在其盲区内出现其它道路使用者时发出提示或警告信息[5]。
盲区监测系统一般采用分级报警,当其他车辆进入盲区,但系统判断并无碰撞风险时启动一级报警,布置在左右外后视镜上或A柱上的LED报警指示灯将点亮;当系统判断盲区内有车辆且有碰撞风险,将启动二级报警,报警指示灯开始闪烁,仪表盲区监测图标闪烁、蜂鸣报警音响起、座椅震动等多种报警方式将共同启动。根据车型级别和行驶工况的不同,盲区监测范围有较大差异,主要为侧后盲区(如图4所示)和转向盲区,触发的边界条件有车速、档位和中控门锁。
盲区监测系统的功能是建立在毫米波雷达对盲区探测的基础上的,抗干扰能力强、精准度高的毫米波雷达是盲区监测理想的传感器,毫米波雷达的工作频率以24GHZ和77GHZ为主。通过优化控制系统算法,盲区监测系统还可以进一步拓展出车门开启预警(Door Open Warning,DOW)和变道碰撞预警(Lane Changing Warning,LCW)等功能。
2.3 车门开启预警
车门开启预警(Door Open Warning,DOW):在停车状态即将开启车门时,监测车辆侧后方的其它道路使用者,并在可能因车门开启而发生碰撞危险时发出警告信息[6]。
车门开启预警系统主要应用于车辆路边停车应用场景。系统通过自动检测车门后侧物体的运动状态参数,包括速度、距离、角度和方向,确定目标物体的位置,预测目标物体在预警区域内的停留时域和车内乘客开门动作时域,通过比较两者时域是否有重合来判断风险,如有风险则触发预警,提醒驾乘人员开门时注意安全,或者进行车门制动,阻止乘客打开车门。因此,传感器探测目标并获取其状态参数是系统设计的关键。车门开启预警系统主要由车辆信息感知模块、目标物体感知模块、预警控制模块、预警执行模块四个部分组成,系统的基本架构如图5所示。
2.4 变道碰撞预警
变道碰撞预警(Lane Changing Warning,LCW):在车辆变道过程中,实时监测相邻车道,并在车辆侧/后方出现可能与本车发生碰撞危险的其它道路使用者时发出警告信息[7]。
变道碰撞预警是盲区监测系统的又一项拓展功能,其系统开启条件与盲区监测系统、车门开启预警系统的控制逻辑相似。变道碰撞预警系统传感器对车辆侧后方障碍物的运动状态包括速度,距离以及方位角度进行实时测量,车辆行驶中侧后方物体可能运动状态如图6所示。
如上图所示,A为相邻车道的运动目标车辆,B为本车道报警区域内的运动目标车辆,C为本车正后方的运动目标车辆。A、B和C可能的运动轨迹如表1所示。
2.5 车道偏离预警
车道偏离预警(Lane Departure Warning,LDW):实时监测车辆在本车道的行驶状态,并在出现非驾驶意愿的车道偏离时发出警告信息[8]。
车道偏离预警系统的工作流程主要分为道路图像预处理、车道检测、车道线检测和车道偏离检测。为了计算输入图像中的关心区域,系统须对已知的范围进行检测,当车辆在直线道路或大曲率半径道路,检测范围会变得无限大,因此一般系统须在不超过250米的道路曲率半径下工作,并在位于车道边界外0.3m的最晚警戒线和车道边界内0.75m的最早的警戒线范围内设置报警阈值。车道识别是系统中的关键部分,目前,主流的车道识别算法是在感兴趣区域 (Region of Interest,ROI)中建立搜索窗口的方法,在确定ROI的宽度时,以车道线的宽度为基准设置,使系统能够更好的处理非理想路况的不确定因素,并建立实时动态搜索带,除了能更精确的追踪车道标志线之外,还能更好地应用于弯路路况。卷积法、Lucas-Kanade(L-K)光流法、车道线追踪(Kalman滤波法)是目前较为常见的车道线检测算法[9],预警算法中的关键是根据采集到的图像信息中的边线探测点拟合车道线。然而,图像噪声,车道线不完整等情况无法避免,如何在清晰度降低的情况下快速准确的检测出车道线成为关键。
2.6 车道保持辅助
车道保持辅助(Lane Keep Assistance,LKA):包括车道偏离抑制(Lane Departure Prevention,LDP)和车道居中控制(Lane Centering Control,LCC)两级功能。车道偏离抑制:实时监测车辆与车道线的相对位置,在其将要超出车道线时介入车辆横向运动控制,以辅助驾驶员将车辆保持在原车道内行驶。车道居中控制:在车辆行驶过程中,持续自动控制车辆横向运动,使车辆始终在车道中央区域内行驶[10]。
车道保持辅助系统可分为感知层、决策控制层和执行层三部分:感知层用于采集车道信息及车辆信息;决策控制层基于辅助力矩及真实驾驶员转向力矩生成虚拟驾驶员转向力矩;执行层主要为电子助力转向系统和制动系统。
2.7 交通拥堵辅助
交通拥堵辅助(Traffic Jam Assistance,TJA):在车辆低速通过交通拥堵路段时,实时监测车辆前方及相邻车道行驶环境,经驾驶员确认后自动对车辆进行横向和纵向控制。
交通拥堵辅助系统基于“前视摄像头(Forward Camera Module,FCM)和前毫米波雷达(Forward Radar Module,FRM)”的传感器组合进行开发,可同时进行横向或纵向运动控制,因此可认为是L2级ADAS功能[11]。一般交通拥堵辅助系统的工作速度区间为0~60km/h,在此速度范围内可为驾驶员提供车辆的纵向和横向辅助。交通拥堵辅助系统的纵向辅助由自适应巡航控制ACC(Adaptive Cruise Control)系统实现,将自身车辆维持在固定的车速或者与前方道路使用者的固定时距行驶。系统较典型的横向辅助策略是,如果车道线存在,车辆会被维持在车道之内行驶,否则车辆会跟随前方车辆的横向移动行驶。
交通拥堵辅助系统的触发条件包括:所有车门完全关闭;驾驶员正确佩戴安全带;启动发动机并挂入D挡;ESC处于开启状态并驻车制动未激活等。
3 侧向驾驶辅助系统技术趋势
驾驶辅助系统可提高驾驶员行车安全性和驾驶舒适性,是提升出行效率、解决交通事故频发问题的有效措施。当前国内机动车保有量稳步快速增长,广大汽车用户走向多样化,以用户为导向的产品开发理念越来越被汽车厂家采用,驾驶辅助系统在提升汽车产品力和用户友好度上作用明显,因此驾驶辅助系统的技术必然是以量产为基础,以用户为导向不断发展。
3.1 环境感知系统融合开发
单一的摄像头或雷达方案存在先天的优势和不足。摄像头方案的优势在于成本较低,开发门槛较低。其不足在于受天气、环境等外部因素影响大和算法稳定性较差。雷达的优势在于稳定可靠、受天气等影响较小,不足是成本高和缺乏辨识能力。因此,采用雷达和摄像头融合方案,综合多传感器的信息输入将会是未来的主流环境感知系统配置。
3.2 智能通用芯片开发
在驾驶辅助功能多样化的背景下,单一系统专用硬件芯片虽然有成本和性能等优势,但每个功能系统需要独立开发算法,开发周期过长且存在技术融合壁垒。相比较,通用芯片能更快地适应ADAS系统整体开发,从而大幅缩短开发时间,加速产品上市。
3.3 建立科学的驾驶行为模型
量产车型配置的驾驶辅助系统面向广大用户,需考虑不同用户的个人差异。因此,建立科学的驾驶人行为模型在ADAS系统开发中尤为重要,通过多维信息的融合可以使驾驶人行为监测结果更为完整,能够更加可靠地将识别驾驶人行为意图,使系统警告触发和行车干预更加科学。
4 结束语
高级驾驶辅助系统在智能网联汽车发展中占据着举足轻重的地位,其中侧向驾驶辅助系统和应用可以有效提高驾驶安全性。本文详细阐述了典型侧向驾驶辅助系统的技术发展现状和趋势,侧向驾驶辅助系统在环境感知层,智能决策层和控制执行层均具备应用于量产车型并面向客户的产业能力。
参考文献
[1] 中国汽车工程学会.节能与新能源汽车技术路线图[M].北京:机械工业出版社,2016.
[2] 李克强,戴一凡,李升波,等.智能网联汽车(ICV)技术的发展现状及趋势[J].汽车安全与节能学报,2017,8(1):1-14.
[3] 《中国制造2025》重点领域技术创新路线图(2017年版)发布[J].稀土信息,2018,(2):32-33.
[4] 余貴珍,李芹,王云鹏,等.车辆弯道行驶侧倾稳定性分析与侧翻预警研究[J].北京工业大学学报,2014,40(4):574-579.
[5] 刘保祥.基于毫米波雷达的汽车盲区监测系统研究[J].北京汽车,2019,(5):21-23,34.
[6] 丁红霞,杨欣怡,王明莉,等.车门开启瞬间防撞预警系统研究[J].科技展望,2016,26(7):136-137.
[7] 王军雷,李百川,应世杰,等.车道变换碰撞预警分析及最小纵向安全距离模型的研究[J].人类工效学,2004,10(4):16-19.
[8] 仝光,李虎,郑文成.车道偏离预警系统研究概述[J].汽车与配件, 2009,(18):26-27.
[9] 钱沄涛,胡忠闯,陈思宇.利用卷积神经网络的车道线检测方法[J].信号处理,2019,35(3):435-442.
[10] 李进,刘洋洋,胡金芳.人机协同下辅助驾驶系统的车道保持控制[J].机械工程学报,2018,54(2):169-175.
[11] 闫玺池,冀瑜.SAE分级标准视角下的自动驾驶汽车事故责任承担研究[J].标准科学,2019,(12):50-54.
猜你喜欢
商情(2018年25期)2018-07-08
当代经济管理(2018年5期)2018-05-25
科技视界(2017年29期)2018-01-18
汽车科技(2017年3期)2017-06-12
中国市场(2016年36期)2016-10-19
中国市场(2016年33期)2016-10-18
科技视界(2016年21期)2016-10-17
新闻世界(2016年10期)2016-10-11
