
基于立体视觉的安全车距新型识别技术的研究
2020-08-13 06:56王晓霞
汽车实用技术 2020年14期
关键词:智能交通
王晓霞
摘 要:车辆行驶距离是交通安全的重要指标之一。安全车距的测量已成为智能交通领域的一个日益热门的研究领域。通过分析立体视觉的基本原理,标定CCD传感器的内外参数,提出了一种测量立体视觉的方法,建立了基于立体视觉和DSP的车辆距离控制系统。一旦车辆的速度和距离形成非安全关联,它就会发出警告,并上传数据或强制限速。该方法根据从左右传感器获取的目标车辆图像的不同坐标,识别特征点,计算到目标车辆的距离,分析车辆距离的安全性。实验结果表明,该方法测量范围宽,测量精度高,运算速度快,能够满足智能交通中安全车距测量的实际需要。
关键词:智能交通;车辆安全距离;图像特征;智能交通;DSP
中图分类号:U462 文献标识码:A 文章编号:1671-7988(2020)14-62-03
Abstract: Vehicle distance is one of the important indexes of traffic safety. The measurement of safe distance between vehicles has become an increasingly popular research field in the field of intelligent transportation. By analyzing the basic principle of stereo vision and calibrating the internal and external parameters of CCD sensor, a method of measuring stereo vision is proposed, and a vehicle distance control system based on stereo vision and DSP is established. Once the vehicle's speed and distance form an unsafe relationship, it will issue a warning and upload data or impose a speed limit. According to the different coordinates of the target vehicle image obtained from the left and right sensors, the feature points are identified, the distance to the target vehicle is calculated, and the safety of the vehicle distance is analyzed. The experimental results show that the method has a wide measurement range, high measurement accuracy and fast calculation speed, and can meet the actual needs of the safe distance measurement in intelligent transportation.
Keywords: Intelligent transportation; Vehicle safety distance; Image features; Intelligent transportation; DSP
CLC NO.: U462 Document Code: A Article ID: 1671-7988(2020)14-62-03
1 引言
随着经济和社会的发展,汽车越来越多,交通堵塞越来越严重,严重的交通事故也越来越频繁,给人们的生命财产安全造成了巨大的损失。2018年,总共有390万余例交通事故报告,其中有21万余个道路交通伤亡事故,导致6余万人死亡,25万余人受伤,直接财产损失9.43亿元[1-2]。对司机来说最大的危险来自于周围的车辆。安全车距测量通过计算当前车与前方目标车之间的距离,在车距较小时发出报警信号,完成危险报警和防撞功能。据不完全统计,汽车碰撞事故在交通事故中占相当大的比例,因为没有注意车辆之间的安全距离。因此,解决安全车距的测量问题可以预防交通事故的发生[3-4],这也是当代智能交通实现的重要内容之一。本文提出了一种基于立体视觉的安全车距测量方法。根据左右传感器获取的目标车辆图像的不同坐标,计算出目标与传感器之间的距离,在车载行驶状态DSP监控系统中增加了安全距离的测量功能,开发了远程传输功能。一旦车辆的速度和距离形成非安全关联,它就会发出警告,并上传数据或强制限速。该方法可用于检测车辆距离,识别车道、障碍物、交通标志等,可广泛应用于智能交通领域[5]。
2 立体视觉的原理
立体视觉是计算机视觉的一个重要分支。根据三角测量原理、立体视觉使用两个CCD传感器获得两张同一对象从不同的立场和获得目标的三维信息通過计算两幅图像中对应点的视差测量相机之间的距离和目标[3]。两个CCD传感器的投影中心距离为基线距离,为B。两个传感器同时观测空间物体相同的特征点P,分别从左CCD和右CCD获取点P图像,假设的两个CCD图像传感器在同一平面上,每个CCD的有效焦距为f,那么特征点P与两个图像坐标的Y坐标相同,也就是Yleft = Yright = Y。那么视差就是D = Xleft-Xright。计算得到的特征点P在摄像机坐标系中的三维坐标为:
3 摄像机标定
相机成像模型包括线性模型和非线性模型。基于针孔成像原理,线性模型建立了空间表面点与像点之间的几何位置关系,描述了空间点、投影中心与像点之间的共线关系,处于理想状态。在不考虑图像点坐标偏差的情况下,严格按照针孔成像原理建立线性相机成像模型。从空间点到像平面的投影过程本质上是建立模型的过程,可以表示为几个坐标系的转换。线性模型的摄像机参数是在转换过程中引入的参数。利用相机标定的线性模型来确定这些参数。校准分为两部分:内部参数校准和外部参数校准。内部参数是指相机成像的基本参数,如主点(图像中心)、焦距、径向透镜偏差、离轴透镜偏差等系统误差参数。外部参数是指相机在空间坐标中的方位角和位置。内外参数标定的组合可以建立三维坐标与二维图像坐标之间的关系。
具体校准程序为:①将校准板置于适当的位置,使其在两个相机中完全成像。通过标定,可以确定两台相机(R1、T1、R2、T2)的内部参数和外部参数,其中R1、T1、R2、T2分别代表左右相机的相对位置和空间坐标。②假设任何空间的非齐次坐标点在空间坐标系,坐标系的左相机和坐标系的右相机xw,x1,x2,然后合并,消除xw后,两个摄像头之间的位置关系R和T可以表示为:
4 车辆距离测量的计算
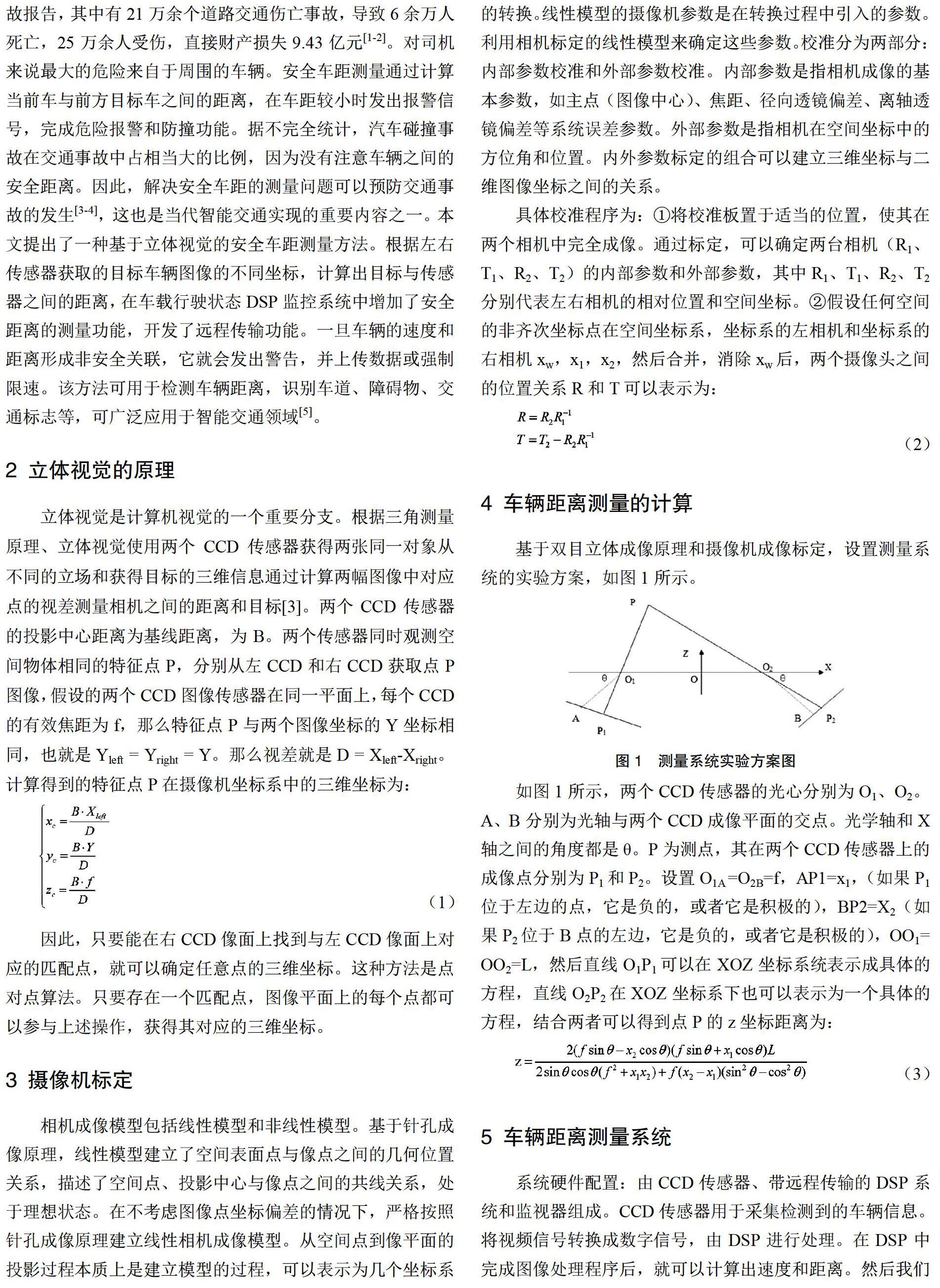
基于双目立体成像原理和摄像机成像标定,设置测量系统的实验方案,如图1所示。
如图1所示,两个CCD传感器的光心分别为O1、O2。A、B分别为光轴与两个CCD成像平面的交点。光学轴和X轴之间的角度都是θ。P为测点,其在两个CCD传感器上的成像点分别为P1和P2。设置O1A =O2B=f,AP1=x1,(如果P1位于左边的点,它是负的,或者它是积极的),BP2=X2(如果P2位于B点的左边,它是负的,或者它是积极的),OO1= OO2=L,然后直线O1P1可以在XOZ坐标系统表示成具体的方程,直线O2P2在XOZ坐标系下也可以表示为一个具体的方程,结合两者可以得到点P的z坐标距离为:
5 车辆距离测量系统
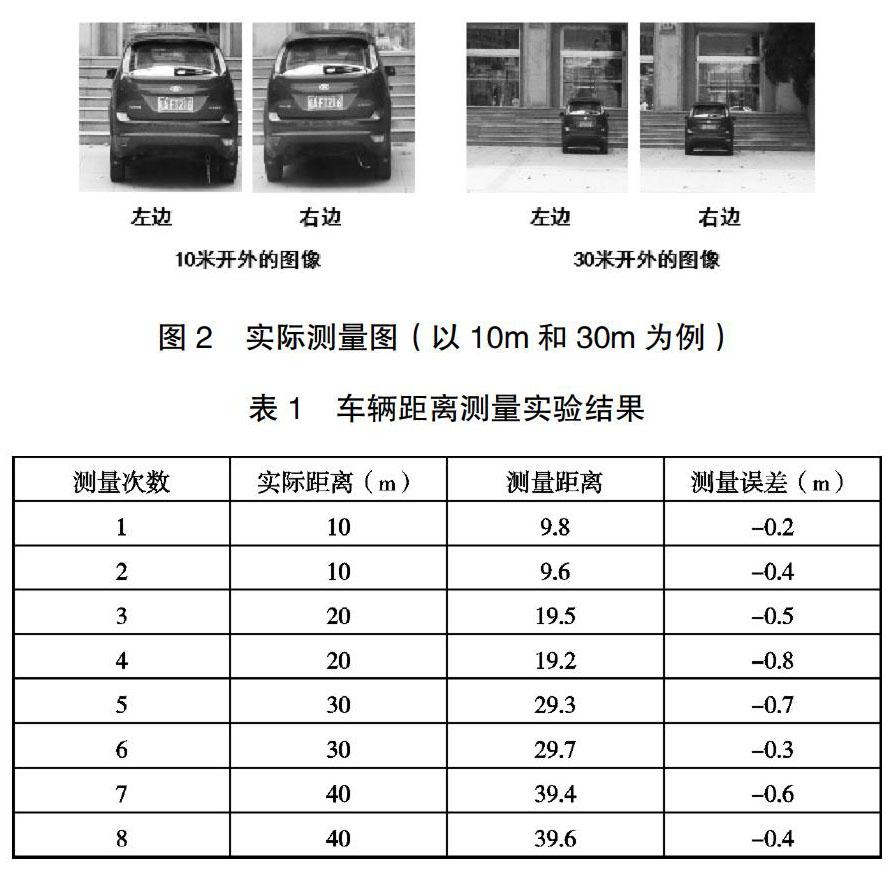
系统硬件配置:由CCD传感器、带远程传输的DSP系统和监视器组成。CCD传感器用于采集检测到的车辆信息。将视频信号转换成数字信号,由DSP进行处理。在DSP中完成图像处理程序后,就可以计算出速度和距离。然后我们可以确定距离是否在安全范围内。如果在安全范围内,则结果将显示在监视器中;否则,将发出警告,数据被上传或者速度被强制限制。以测量系统的重要环节为基础,选取10m、20m、30m、40m四个距离进行实际测量,选择某型号轿车进行了实验验证。图2为10m和40m静态车辆的图片,完成系统搭建后,选择4个车距,10米,20米,30米,40米,做实际测量。实验结果如表1所示。
通过数据分析,测量误差小于5%,符合《公路交通管理办法》第十五条关于高速公路车辆距离的规定,充分表明该方法可以满足车辆距离测量的实际要求。基于DSP硬件测量系统,车辆距离的计算可以保证实时计算速度,低测量误差,快速,准确地测量前方和前方车辆的距离,并判断车距组合速度的安全性。
6 结论
综上所述,由于应用于智能交通技术的立体视觉技术仍处于研发过程中,因此,由于许多外部影响因素,在实际应用很难全面考量。外部因素包括沿车辆法线方向的车辆距离,车辆之间的横向距离,光晕干扰,行人干扰和车辆变道等。本文所做的研究是静态的(在较少外部因素干扰的情况下),尽管如此,基于本文的研究理论和基础,在今后,在移动车辆中应用的立体视觉技术的研究将越来越深入和切合实际。
参考文獻
[1] 王丽影.安全车距检测系统的研究与设计[D].长春工业大学,2013.
[2] 张凤静,王红阳,张轩.基于立体视觉的汽车安全车距预警系统研究[J].舰船电子工程,2012,32(08):134-136.
[3] 张凤静,周建江,夏伟杰.基于双目立体视觉的汽车安全车距测量方法[J].智能系统学报,2011,6(01):79-84.
[4] 张凤静.基于立体视觉的汽车安全车距预警系统研究[D].南京航空航天大学,2010.
[5] 林广宇.基于嵌入式技术的车载图像监控系统研究[D].长安大学, 2009.
猜你喜欢
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
数字技术与应用(2016年9期)2016-11-09
科学与财富(2016年28期)2016-10-14
