
人体姿势控制能力测量理论及仪器研究现状
2020-08-25 02:33孙继成熊凯文胡文东
医疗卫生装备 2020年8期
程 珊,孙继成,马 进,熊凯文,胡文东
(空军军医大学航空航天医学系医学装备教研室,西安 710032)
0 引言
人体正常的姿势稳定性与日常生活、工作等密切相关。姿势控制能力测量的理论与应用一直是各国学者研究的重点。早期的研究主要集中在姿势稳定性测量设备在运动和康复医学等领域的应用。Kiers 等[1]总结发现,现有研究大多数是关于姿势控制能力在运动领域方面的应用。其中,对于足球运动员[2]、舞蹈训练者[3]等在比赛前后的姿势稳定性评估较多。在康复医学方面,姿势控制能力的测量主要应用于脊髓硬化症患者[3]、前庭功能异常患者[4]、脑部损伤患者[5]、阿尔茨海默病患者[6]等特殊人群的康复治疗上。近年来,姿势控制能力测量设备的研究和应用也扩展到其他领域,如睡眠障碍评估[7]、驾驶疲劳检测[8]等方面。姿势控制能力测量技术作为一种新颖的综合功能状态评估手段,操作简便,受到了国外学者的广泛研究,但国内相关研究起步较晚,且大多数学者对姿势控制能力测量的理论基础与仪器研制现状并未深入了解,影响该技术在国内的发展和应用。
本文从姿势控制能力测量的基本原理、方法与时机、仪器设计及存在的问题等方面,简要介绍人体姿势控制能力测量的理论与仪器研究现状,希望为该技术在相关领域更好地推广应用提供参考依据。
1 姿势控制能力测量理论研究现状
1.1 姿势控制能力的测量原理
正常站立姿势的维持主要依靠视觉、前庭器官及下肢本体感觉等信息[9],在中枢神经系统对这些信息进行整合与处理后,发出指令作用于人体骨骼、肌肉等系统,从而使人及时地控制与调整站立姿势[10]。而身体重心晃动的轨迹则可以通过压力传感器记录的身体压力中心(center of pressure,COP)的变化来表示,因而姿势控制能力的测量方法又被形象地称为姿势图测量法。该方法常被用来研究复杂的活动和平衡机制以及平衡策略的交互作用[11]。
1.2 姿势控制能力的测量方法
1.2.1 静态姿势图(static posturography,SPG)测量方法
SPG 测量方法是一种静态姿势控制能力测量方法,该方法流程比较统一,要求被测者稳定地站立于具有压力传感器的测试平台上。在此过程中,身体重心微小的变动则由双足部位的压力传感器记录下来,进而通过分析COP 的变化反映姿势控制能力的大小。基于COP 变化数据可以计算姿势稳定性参数[12],包括稳定指数、重力分布系数、重心晃动的面积、重心在横向与纵向上偏移距离及在0.01~3.0 Hz频率谱上的身体晃动程度等[13]。
1.2.2 动态姿势图(dynamic posturography,DPG)测量方法
DPG 测量方法是一种与SPG 测量方法相对应的动态姿势控制能力测量方法。虽然DPG 测量方法的任务设置策略有所不同,但仍具有相似的特点。被试在主动或被动地接受相关干预条件下维持站立姿势,从而评估其身体晃动程度。其中,主动策略要求被试在稳定的压力平台上进行姿势任务,如由坐位变为站立位、踮脚尖或行走任务等,而后对其姿势稳定性进行评估[14]。而被动策略则要求被试站立于不稳定的压力平台上(旋转或振动等干扰)维持姿势稳定性[15-17],例如美国的SportKAT 2000 系统即通过倾斜的测量平台操纵光标追踪圆周运动的光点[17](如图1 所示)。另外,Baghbani 等[18]在研究时还采用了一种被称为米字格星形平衡功能测试(star excursion balance test,SEBT)的方法。该方法以一个固定点为圆心,在周围设置了8 个方向,相邻方向角度为45°。其中主导腿站立于圆心,非主导腿脚尖在某个方向上努力达到最远距离,以此评估动态的平衡能力。
1.2.3 SPG 与DPG 测量方法的区别
SPG 与DPG 测量方法对于姿势控制能力测量的应用效果有所差别。由于动态姿势控制能力的紊乱与下肢神经肌肉功能损伤的不利效应及代偿反应的联系较为密切,故SPG 测量方法在区分潜在的姿势控制能力受损机制方面可能比较有限。而DPG 测量方法在感觉运动协调性降低与相关的损伤评估等方面可能会提供更多的参考信息[18]。因此,此种差异也可能造成SPG 与DPG测量方法在未来的研究与应用中发挥不同的作用。
1.3 姿势控制能力的测量条件
姿势控制能力测量常用的双腿站立条件有4 种:睁眼或闭眼站立于稳定的测试平台、睁眼或闭眼站立于不稳定的平台。例如,Ortuno-Cortes 等[4]在实验中采用了这4 种测量条件研究前庭功能异常患者的SPG 与临床测验结果的关系。结果发现,SPG 指标在睁眼站立于不稳定海绵垫的条件下与临床测验结果的相关性较好。Barozzi 等[19]则在研究威廉斯综合征对姿势控制能力的影响时同样采用了SPG 的4 种测量条件,并指出睁眼条件下的重心晃动轨迹长度与面积要比闭眼时更大。Jackson等[14]研究多发硬化症患者在疲劳状态下姿势控制能力的表现时也用到了这4 种条件。此外,以往文献还报道了闭眼条件下头部向左、向右、向后伸展与向前屈曲等姿势控制能力测量条件[20],但相关研究并不多。
单腿站立条件在姿势控制能力的测量中也时常被报道。例如,Bruniera 等[21]研究了下肢肌肉疲劳条件下单腿站立姿势的反应情况。Ben 等[22]在睁眼与闭眼条件干预基础上,增加了单腿站立测量条件,以此研究运动员经过8 周本体感觉训练后的姿势稳定性变化情况,也取得了较好的效果。然而姿势任务难度的提高也可能会增加其他不利条件(如疲劳状态)对姿势控制能力的不利效应[23]。由此可见,应根据实际情况选择合适的姿势控制能力的测量条件,以便取得理想的预期效果。
1.4 姿势控制能力的测量时机
姿势控制能力的相关研究是基于测量干预条件展开的,而姿势控制能力的测量时机同样会影响干预条件的效果。Sadowska 等[24]研究指出,无论被测者先进行睁眼条件还是闭眼条件下的姿势图平衡测量,疲劳状态对姿势控制能力的影响效应都是第一次测量时最大。如果影响效应持续时间较短,那么姿势控制能力的可靠测量时机则很短。因为反复双脚跟抬起锻炼计划导致脚踝肌肉疲劳的不利效应将随着时间的延长而削弱,最终将不再被观察到。Papa等[25]则进一步指出,虽然肌肉疲劳效应对下肢关节的动力学影响具有可测量的影响,但此种动力学改变可能在15 min 内恢复。甚至某些高强度的训练,如自行车骑行等有可能导致姿势控制功能在应对体力锻炼引起的肌肉疲劳时呈现出一定的适应性反应,将会减弱姿势晃动,从而影响姿势控制能力恢复的时间[26]。由此可见,实验干预结束后的姿势控制能力测量过程不宜持续过长时间,否则条件干预后姿势稳定性的改变程度可能会被低估,导致错误的结论。因此,在将来的研究中,姿势控制能力的测量时间应控制在15 min 内或者在干预任务的过程中进行实时测量,以此保证姿势控制能力测量结果的可靠性。
1.5 姿势控制能力的测量可靠性
姿势图的测量方法之所以受到研究者的广泛关注,还因为其可靠性经过相关实验的验证。例如,Ebrahimi 等[27]研究了Synapsys 人体姿势平衡系统(SPS,Marseille,France)在 7~12 岁儿童中的重测信度(2 次测量间隔1 周),结果提示基于组内相关系数(intraclass correlation coefficient,ICC)的重测信度值在不同姿势控制干预条件下处于中等至极好的范围(0.68~0.94)。Hebert 等[28]则重点研究了一种被称为感觉组织测试(sensory organization test,SOT)的计算机化DPG 各指标在多发硬化症患者中有较好至优秀的可靠性(ICC 值范围为0.70~0.90),而综合分数的ICC 值也达到了0.90。由此可见,静态与动态姿势控制能力测量方法的可靠性是比较高的,但不同的测量条件之间姿势图指标重测信度也存在一定的差异性。
具体的姿势图测量指标同样具有良好的重测信度[29]。Alahmari 等[30]指出,基于左右方向及前后方向上COP 时间序列数据计算的晃动速度与面积等参数指标的重测信度都较好。但Barozzi 等[31]的研究则进一步指出姿势图中的加速度相关指标的测量可靠性较高,而面积参数的可靠性中等。此外,Whitney 等[32]则直接指出了基于加速度计(accelerometry,ACC)测量方法的ICC 值处于0.63 ~0.80 范围内,而基于COP测量方法的重测信度则稍低,处于0.42~0.81 范围内。由此可见,姿势控制能力测量方法指标体系的可靠性是比较高的,但不同指标体系下的姿势图参数的可靠性存在一定的差异。
2 姿势控制能力测量仪器研制现状
2.1 国外研究现状
Ma 等[33]在研究24 h 持续清醒期间姿势控制能力改变规律时,采用了一种EAB-100 平衡检查系统(Anima,Tokyo,Japan)。该系统采用 SPG 测量方法,由定制的计算机程序、显示系统和打印系统组成,主要测量睁眼站立条件与闭眼站立条件的COP 改变的时域参数,如COP 轨迹长度、在横向与纵向上的偏移距离等。Morad 等[34]在研究睡眠剥夺所致的疲劳评估时也采用了一种SPG 设备(Beamed Medical,Petach Tikva,Israel)。该设备基于双脚站立的4 个独立压力板上的垂直压力波动数据进行工作,其测量指标主要为频域分析的数据,如身体晃动强度在0.01~3.00 Hz的傅里叶转换参数等指标。Vieira 等[13]采用一种被称为 AMTI force platforms(OR6-7 model)的压力平台系统收集被试4 d 徒步远足过程中的COP 数据,该系统可以综合时域分析与频域分析参数,包括整体稳定性描述(global stabilometric descriptors)、频谱分析(spectral analysis)等。Llorens 等[35]在实验中以一种更低成本且小体积的平衡测试平台Wii Balance Board(WBB)为基础,将其与一些传统的平衡评估方法结合形成了一套基于WBB 的姿势图系统,并在脑卒中患者中评估了该系统的可靠性与信度。
此外,Petro 等[36]则根据检测平台的设置形式对DPG 测量仪器进行了分类,包括固定接地平台、平衡板、旋转平台、水平位移平台、踏步台、计算机DPG等。虽然姿势控制能力测量仪器的研制多种多样,但基本的原理和测量方法是相似的。
2.2 国内研究现状
国内关于姿势稳定性测量仪器的研究相对不足。张利利等[37]结合日本的EAB-100 系统和以色列的Tetrax 测量系统[20]的优点,设计了一种静态的人体重心测试软件,可以将双脚下的压力传感器记录的COP 数据同时转换为时域与频域参数[12]。
程珊等[38]基于 Baghbani 等[18]的 SEBT 方法中方向设置的策略与Yeh 等[39]报道的实验设备及视觉反馈的实验方案(如图2 所示),并结合张利利等[37]开发的人体重心测试软件,设计了视觉反馈姿势调节能力检测系统。该系统能够测量被试向不同方向目标位点调节过程中的姿势控制能力,并基于测试过程中重心晃动轨迹的变化,计算被试的调节效率、调节精度与稳定性(如图3 所示)。该系统在重复测量条件下的练习效应大小也经过了系统分析,其硬件设备及测量场景如图4 所示[40]。
程珊等[41-43]在研究模拟飞行任务负荷的评估技术时验证了该系统在任务负荷评估中可发挥较好的作用。该团队还采用该系统进一步发现不同干预条件下的姿势控制能力应对睡眠剥夺的改变规律有所不同,且构建了脑力疲劳的评估模型[44]。另外,利用该系统,基于DPG 的指标,还可以构建体力疲劳的评估模型[45]。文献[46]也验证了该系统在疲劳状态评估中具有较好的效度。由此可见,该系统在国内未来的研究中会发挥更大的作用。
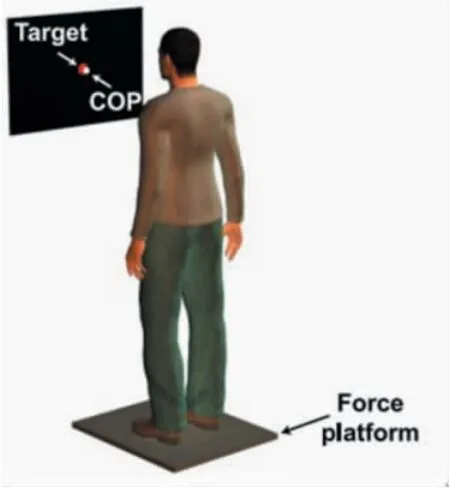
图2 视觉反馈的实验方案[39]

图3 视觉反馈姿势调节能力检测系统位点分布示意图[38]

图4 视觉反馈姿势调节能力检测系统的硬件设备及测试场景[40]
3 结语
国外关于姿势控制能力测量理论及仪器的研究逐渐趋于成熟,国内研究也取得了一定的进展。但姿势控制能力测量理论与仪器研究仍存在一些不足。测量理论方面的不足主要表现为:(1)姿势控制能力测量方法设计的姿势干预条件虽然较多,但每种姿势的优缺点及敏感性并没有深入探讨;(2)姿势控制能力稳定性的衡量指标繁多,可导致使用者对结果解读产生困难。而姿势控制能力测量仪器的不足主要表现为:(1)压力传感器精度还需进一步提高,否则可能导致任务干预条件对姿势控制能力的影响效应测量不到;(2)姿势控制能力测量仪器使用大多需要配合干预任务,设备使用人员需要经过一定的培训,掌握标准的测量流程和测量误差的控制方法。
姿势控制能力测量方法与仪器多种多样,取得了很大的进展,而随着时代的发展与技术的进步,姿势控制能力测量技术也应与时俱进。主要应在以下方面寻求突破:(1)测量系统的压力传感器、数据处理等模块应向小型化、便携化方向发展;(2)测量系统的功能应向多元化方向发展,不限于测量姿势稳定性,还可以增加其他测量模块,如心率检测等;(3)基于不同的功能模块,测量系统应分别设置相应的评分模块及综合判别标准,便于结果的反馈与解读。在未来的研究中,研究者应重视姿势控制能力测量仪器的小型化、便携化与多元化的发展趋势,将基于姿势控制能力测量的仪器升级为基于多生理指标的特定人群功能状态实时评定系统。以上问题的解决不仅会进一步推动姿势控制能力测量技术在运动医学、康复医学等领域的应用,还可为不同职业人群制订个性化的功能状态监控方法。
猜你喜欢
燃气涡轮试验与研究(2020年2期)2020-06-20
文苑(2020年5期)2020-06-16
小学生学习指导(低年级)(2020年3期)2020-06-02
中国生殖健康(2019年10期)2019-01-07
新课程·中旬(2016年11期)2017-02-10
新教育时代·教师版(2016年27期)2016-12-06
运动(2016年7期)2016-12-01
商场现代化(2016年8期)2016-05-10
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
印制电路信息(2015年6期)2015-12-30
