
上肢康复机器人主动训练模式控制策略研究
2020-08-25 02:06张孟旋王晨程刘庆运
机械工程与自动化 2020年4期
张孟旋,刘 涛,王晨程,刘庆运
(安徽工业大学 机械工程学院,安徽 马鞍山 243000)
0 引言
脑卒中(中风)是由脑局部血液循环障碍所导致的神经功能缺损综合症[1],其治疗方式通常采用医师徒手治疗并配以简单的医疗设备辅助,难以满足我国对康复医疗设备和人工康复资源的巨大需求[2]。因此,近年来国内外学者提出将机器人与康复医学有机结合,利用机器人代替理疗师辅助偏瘫患者进行康复训练[3]。
Noritsugu T等[4]基于阻抗控制算法,实现了二自由度康复机器人的多种物理治疗模式;Akdogan E等[5]基于阻抗控制算法,实现了膝关节康复机器人的柔性控制,使得康复运动能够得到较好的控制;Huang J等[6]利用气动人工肌肉开发具有肩、肘、腕关节的四自由度康复机器人,可实现患者的被动康复训练;潘礼正等[7]通过阻抗控制算法,实现了患者与机器人的柔性控制,保证了康复机器人的安全性和平稳性;巴凯先等[8]在足式仿生机器人的实验平台上验证了基于力的阻抗控制相对于基于位置的阻抗控制具有更快的响应速度。
上述研究工作主要针对患者单关节的康复训练,并且存在人机交互力跟踪响应速度慢、控制精度低等问题,导致患者训练的舒适度低,安全性能得不到保障。基于力的阻抗控制,力跟踪能力强,能够实现训练的平稳性,赋予患者足够的舒适度,符合人体的运动要求。考虑到患者主动参与康复训练,对恢复病情具有关键作用,所以应采取以患肢为主的主动训练模式。因此,本文基于力的阻抗控制算法,设计了面向单关节与多关节主动康复训练的控制器。
1 上肢康复机器人建模
1.1 康复机器人运动学建模
本文提出的六自由度上肢康复机器人如图1所示,结构设计满足人体工程学与人体上肢解剖学的要求,能够还原患者上肢的运动机构模型,可用于肩、肘和腕三大关节的康复训练,从结构上实现患者训练时的舒适性和平稳性。
根据图1(a),釆用前置D-H法建立康复机器人的连杆坐标系简图,如图1(b)所示。
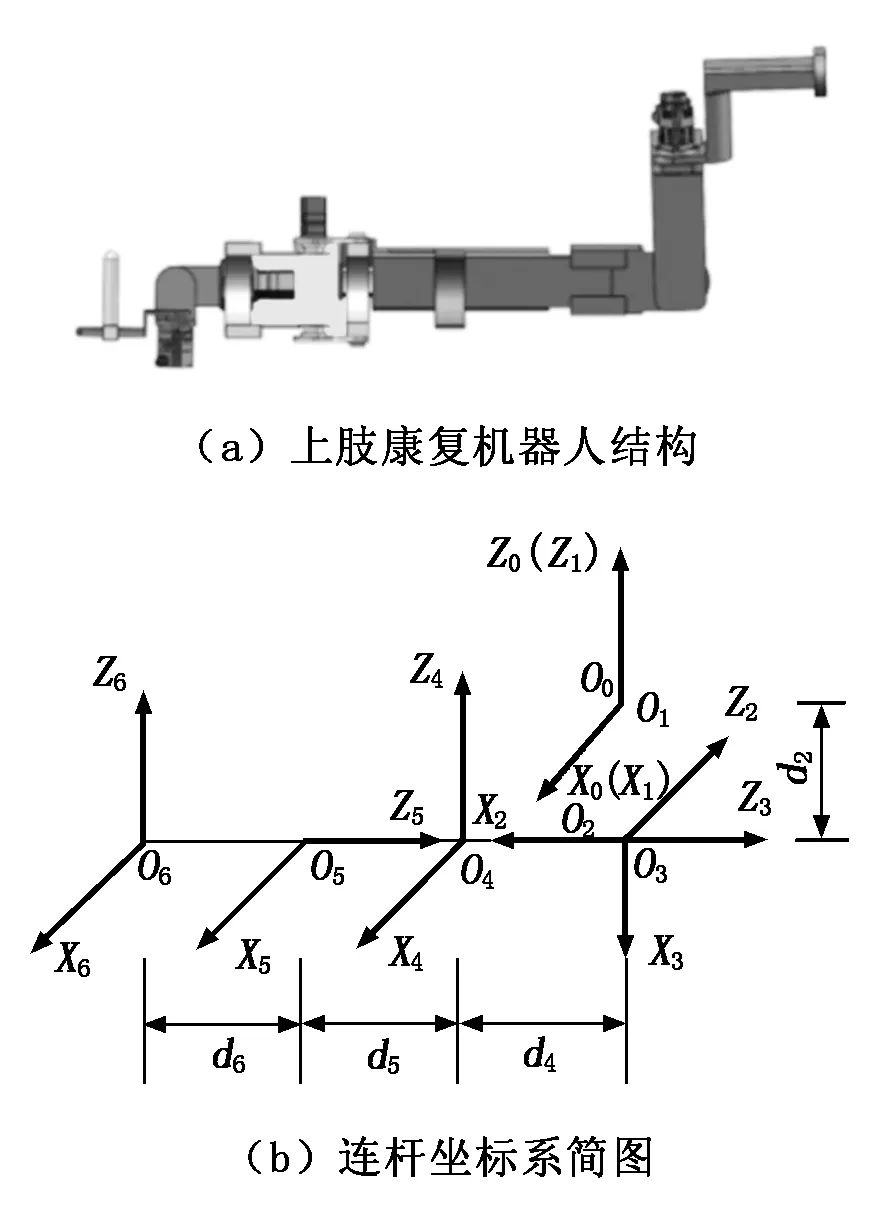
图1 六自由度上肢康复机器人
机器人末端的位姿可由式(1)和式(2)求取:
(1)
T=A1A2A3A4A5A6.
(2)
其中:θi为旋转关节的关节变量;di为关节偏移量;ai-1为连杆i-1的长度;αi为关节扭角;Ai为各连杆的D-H矩阵;s为sin;c为cos。
1.2 康复机器人动力学建模
本文利用Lagrange函数法建立了六自由度上肢康复机器人的动力学模型,并确定康复机器人关节输出力矩的参数关系。针对旋转运动,拉格朗日力学有如下两个基本方程:
L=K-P.
(3)
(4)
其中:L为拉格朗日函数;K为系统动能;P为系统势能;τi为系统输出转矩。
对于N关节机器人来说,由式(3)可得:
(5)

将式(5)代入式(4),可得拉格朗日动力学方程:
(6)
式(6)中有:
(7)
(8)
(9)

2 力阻抗控制器设计
阻抗控制的特点是不直接控制机器人与环境的作用力,而是根据机器人末端位置或速度与末端作用力之间的关系,通过调整阻抗参数,间接地达到控制力的目的,属于柔顺性控制。一般可以用下面的二阶线性微分方程描述:
(10)

患者进行主动训练时,患肢带动康复机器人做康复运动,运动速度慢且平稳,加速度变化很小,因此忽略加速度对阻抗模型的影响。将阻抗控制算法运用到机器人的各关节空间中,可以有效地简化系统。因此,在关节空间中,建立力阻抗控制模型:
(11)

考虑人机交互力矩、关节空载力矩和关节摩擦阻尼等因素的影响,建立的系统控制模型如图2所示。
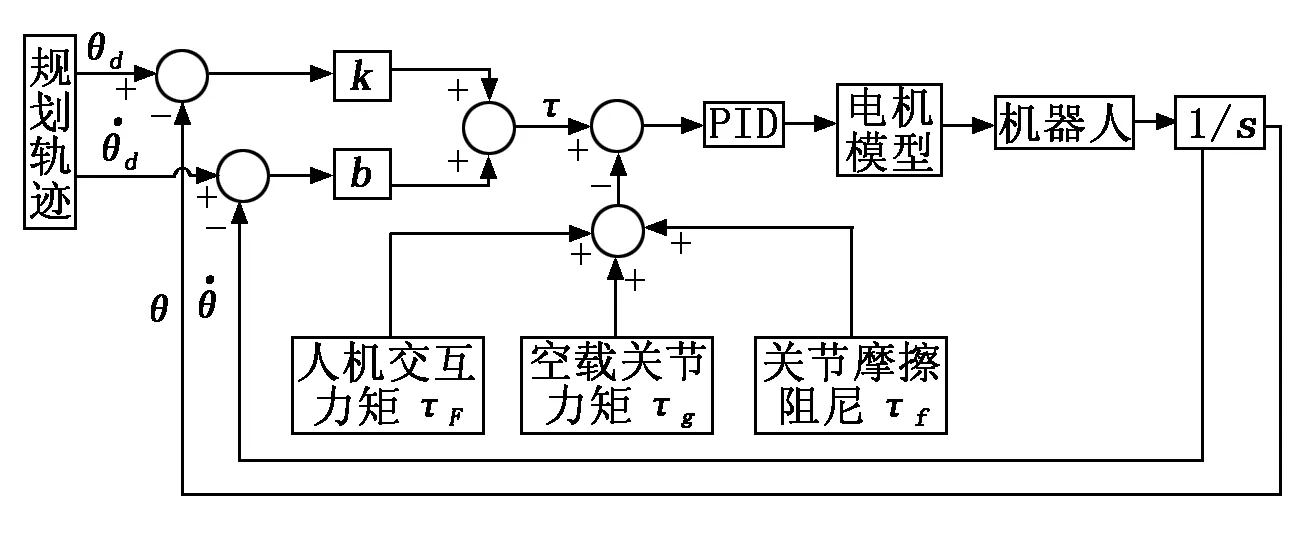
图2 系统控制模型
3 仿真结果分析
根据上肢康复机器人系统控制模型,在Simulink中构建力阻抗控制器仿真框图,如图3所示。图3中,τm为转矩偏差。
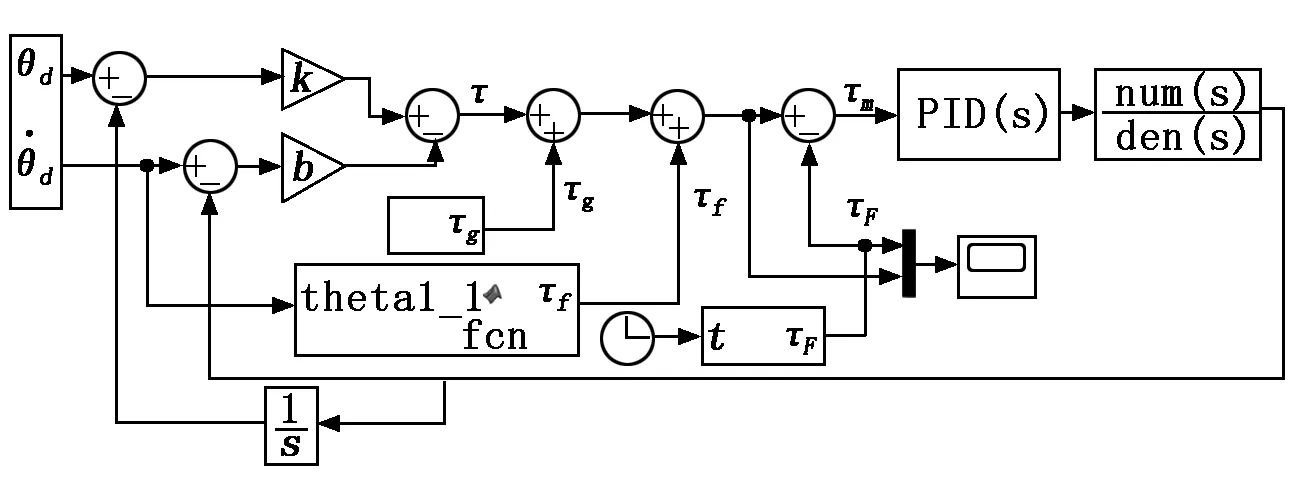
图3 力阻抗控制器仿真框图
针对肩关节摆/收的单关节主动康复训练以及肩关节屈/伸和肘关节屈/伸的多关节主动康复训练,基于第2节所设计的力阻抗控制器,在Simulink中进行仿真。考虑到人机交互力动态多变的情况,以阶跃信号、斜坡信号、正弦信号三种不同状态的交互力信号作为输入进行仿真实验,仿真结果如图4~图6所示。
由图4可以看出:在t=1.0 s时基本上实现了对人机交互力的跟踪,但仍存在一定的稳态误差;图4(a)、图4(b)中,在t=1.5 s时,稳态误差已维持在较小的范围内;图4(c)中,虽然在t=1.0 s时实现了对人机交互力的跟踪,但是在波峰波谷处,仍存在一定的稳态误差,说明控制器对变化频率较快的人机交互力进行控制时存在稳态误差无法消除的问题。由图5、图6中可以看出:肩的屈/伸关节与肘的屈/伸关节同时进行主动康复训练时,控制器仍然可以在较短的时间内实现对人机交互力的跟踪,能够适应多关节协调运动时动力学模型变化等未知因素的影响,具有较强的鲁棒性。
综上,无论是单关节、还是多关节的主动康复训练,力阻抗控制器在康复过程中都能迅速地对人机交互力作出响应,实现人机交互力的跟踪。机器人具有较强的柔顺性,使得患者拥有舒适的人机交互感,从而保证了患者主动训练的安全性。
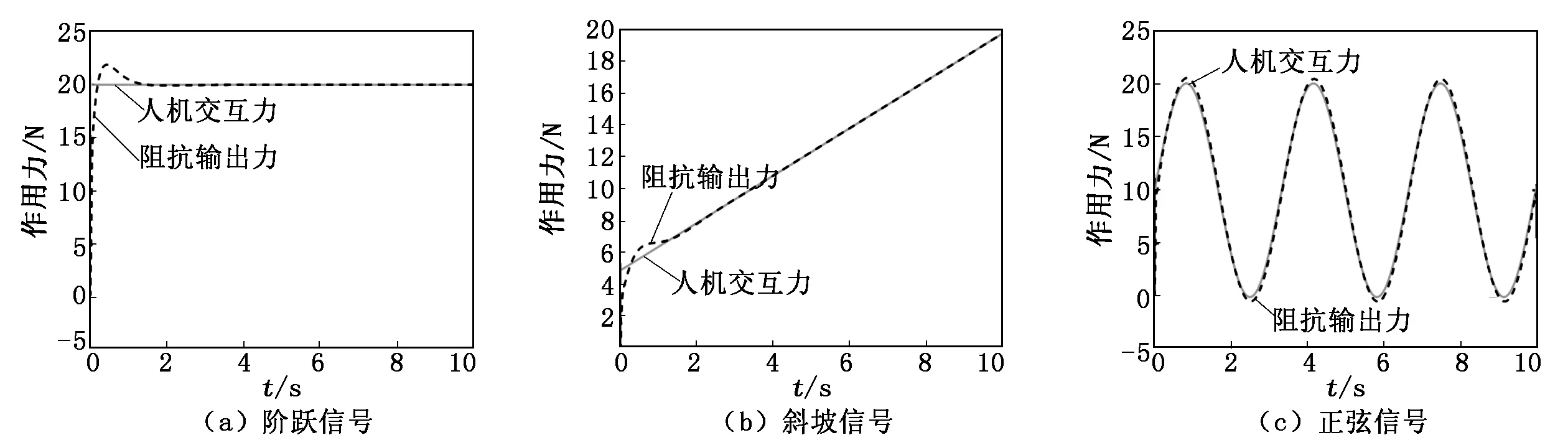
图4 单关节(肩摆/收)力跟踪曲线
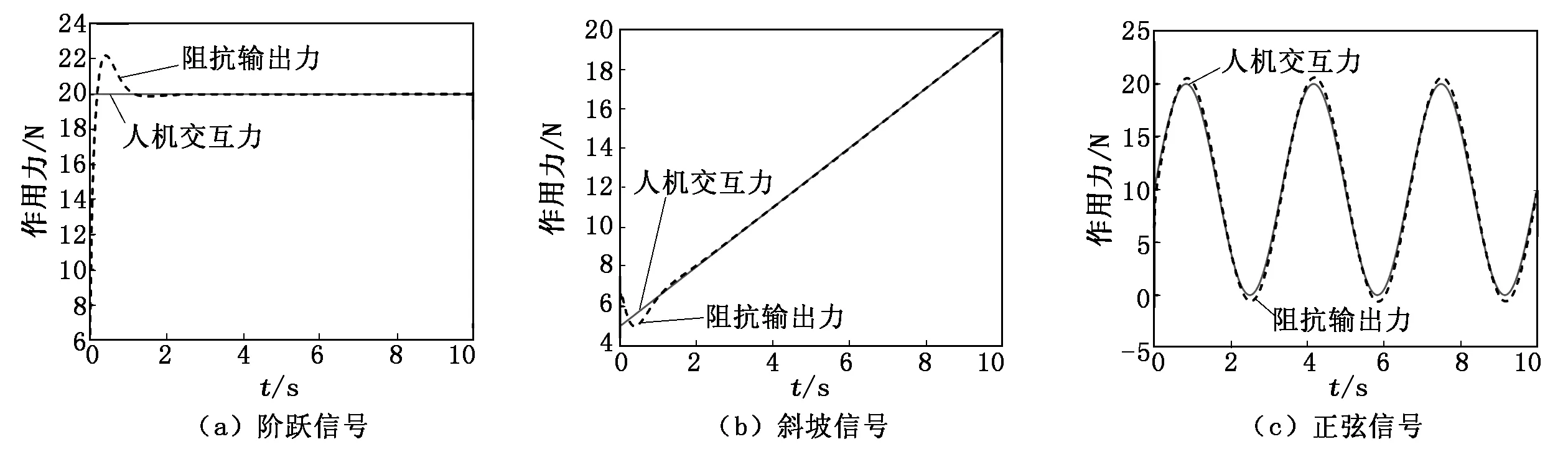
图5 多关节(肩屈/伸)力跟踪曲线
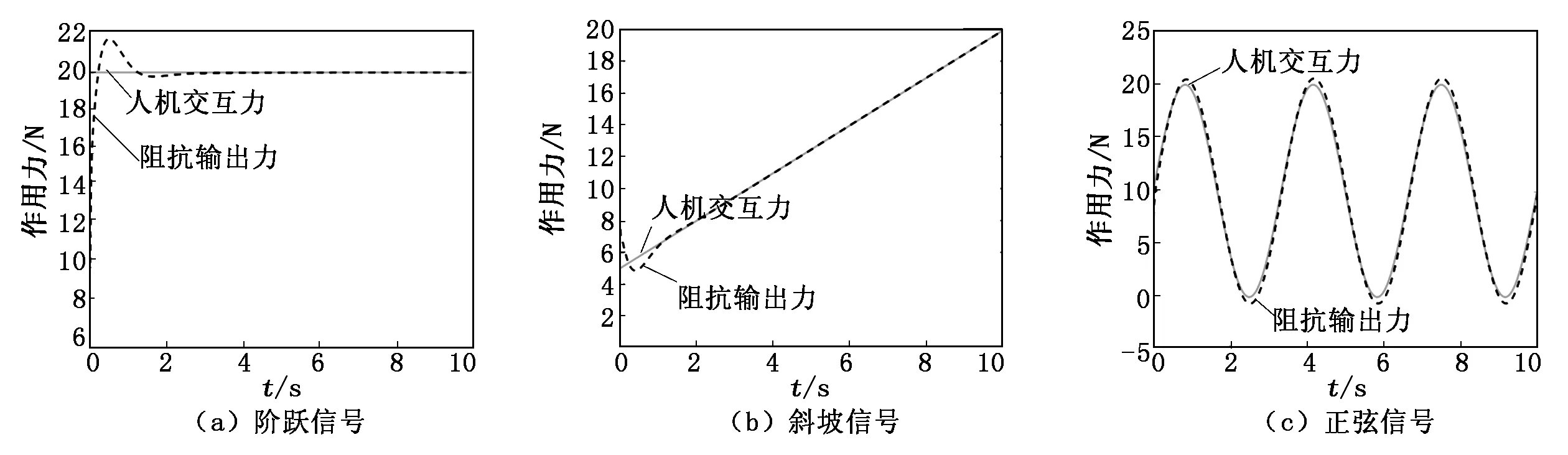
图6 多关节(肘屈/伸)力跟踪曲线
4 结论
本文在完成六自由度上肢康复机器人运动学与动力学分析的基础上,基于力的阻抗控制算法,设计了面向单关节与多关节主动康复训练的力阻抗控制器,仿真结果验证了力阻抗控制器的可行性。对不同状态的人机交互力跟踪,控制器能满足响应速度快、控制精度高的要求。同时,控制器能够适应多关节协调运动时动力学模型变化和人机交互力动态多变等未知因素的影响,具有较强的鲁棒性,从而保证了机器人的柔顺性,给予了患者足够的舒适度与安全性。但是,控制器对复杂变化的人机交互力跟踪时,存在稳态误差无法消除的问题,后续研究中需要解决。
猜你喜欢
大电机技术(2022年3期)2022-08-06
核科学与工程(2021年4期)2022-01-12
煤气与热力(2021年4期)2021-06-09
中华戏曲(2020年1期)2020-02-12
中国自行车(2018年4期)2018-05-26
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
制造业自动化(2017年2期)2017-03-20
中国民族医药杂志(2016年7期)2016-05-09
中国康复(2015年4期)2015-04-10
