
煤矿机车变频调速控制系统设计
2020-08-26 07:36许海明
机电工程技术 2020年7期
许海明
(山西高平科兴游仙山煤业有限公司,山西晋城 048400)
0 引言
煤炭资源作为我国的主要能源之一,是我国改革开放以来,社会与经济发展的重要基石[1]。为了保证煤矿生产工作的安全,避免瓦斯爆炸、透水等事故的发生,世界各国对煤矿的生产环境与机电设备的安全性进行不断探索[2]。矿用蓄电池电机车是国内煤矿运输的主要设备之一,过去主要采用直流电作为牵引电源,在井下瓦斯环境下,直流电的泄漏容易引起火花,发生爆炸事故,并在调速过程中会造成很大的能量损耗,所以目前煤矿机车主要采用交流驱动的方式[3-4]。转矩是电机调速控制的关键变量,在闭环控制回路中,交流异步电机结构简单,控制精度与可靠性高,在煤矿机车上得到了广泛的应用[5]。本文对煤矿机车交流异步电机的变频调速系统进行设计。
1 电机的控制原理分析
大多数电机调速系统通过转矩来调节转速,这个过程可以通过数学关系转换,可以看作一个积分环节,时间常数与电机和其负载的转动惯量有关。系统对转矩控制的过程将直接影响调速结果的动、静态特性。目前交流电机的控制方式主要有直接矢量控制与间接矢量控制两种,其中直接矢量控制通过检测磁场和运算分析来确定转子的空间位置分布,控制方法简单,但是受到电机影响,检测信号的波动较大,数据修正与应用难度较大。间接矢量控制不需要检测定、转子磁链的实际位置,通过控制定向是通过控制转差频率来实现转速控制,所以又称为转差频率法[6]。
本控制系统采用SVPWM 控制策略,将异步电机模拟成直流电机进行控制,减少电机的谐波损耗。SVPWM控制策略与传统控制策略的控制流程不同,在对矿用机车调速前,先将蓄电池中的直流电逆变为交流电,利用SVPWM 调制向电机输入控制电压向量,从而实现调速控制[7]。SVPWM 控制策略的实质是平均值等效原理,即控制基本电压矢量的平均值和给定的电压矢量相等,其三相矢量变化规则如下:

式中:UA(t)、UB(t)与UC(t)分别为三相电压的空间矢量,其矢量之和U(t)的计算公式如下:

根据式(2),当幅值Um为定值时,矢量U(t)以角频率ω按逆时针方向匀速旋转,形成一个旋转的空间矢量,SVPWM 控制策略的目的就是通过使用三相桥的开关状态表示矢量U(t)的空间旋转状态。
2 系统控制方案与硬件设计
2.1 控制系统结构设计
控制系统的结构如图1 所示。矿用机车的蓄电池作为整个控制系统的直流电源,同时向控制系统的主电路与电机供电。电机的转速信号通过光电编码器采集处理,传输到DSP处理器中,DSP处理器通过计算分析得到电机的转动速度和位置角度,再利用SVPWM矢量控制算法得到电机PWM控制信号。控制信号经过光耦隔离电路输入到驱动电路模块,驱动IPM 功率开关器件,完成调速系统电机电源的直—交转换。

图1 系统控制方案结构
DSP处理器模块作为整个控制系统的核心部分,主要负责对整个系统的监测和运算功能,对电路进行过压和过流等保护功能,实现电机的双闭环负反馈转速控制,保证系统输出结果的稳定性。异步电动机的控制系统计算过程复杂,工作量比较大,综合考虑DSP芯片的工作性能,选用TI公司出产的TMS320F2812作为系统的核心处理器。
TMS320F2812 DSP 为32 位定点控制单元,主频150 MHz,具有片内256 k×16 bit的ROM存储单元和片内34 k×16 bit的RAM存储单元,两个事件管理器模块EVA 和EVB,事件管理器的外部设备功能丰富,具有较好的控制计算功能。TMS320F2812 DSP 具有体积小、性能强、可靠性高等优点,满足很多工业的应用环境[8]。
2.2 系统的检测模块设计
DSP芯片通过检测模块的各装置采集系统各部分的工作数据,通过实时的信息反馈,DSP 芯片对系统的输出进行及时地调整,对系统各部分器件进行保护,本节将对系统的检测模块进行设计。
机车蓄电池同时向控制系统与机车交流电机供电,为了比避免损伤电路,影响系统工作,需要对蓄电池的电压进行实时监测。蓄电池电压的检测电路如图2 所示,其中电路中的R1与R2阻值根据电路中的电压等级进行调整。
本文设计的调速控制系统采用光电编码器对电机的转速进行间接检测,光电编码器采集到的数据不需要进行A/D转换。TMS320F2812 DSP芯片中包含了一个正交解码脉冲电路(QEP),可直接对电机转速和位置进行测量。DSP 芯片通过QEP1 和QEP2引脚接收光电编码器传输到的脉冲信号,QEP电路直接对其解码计数。
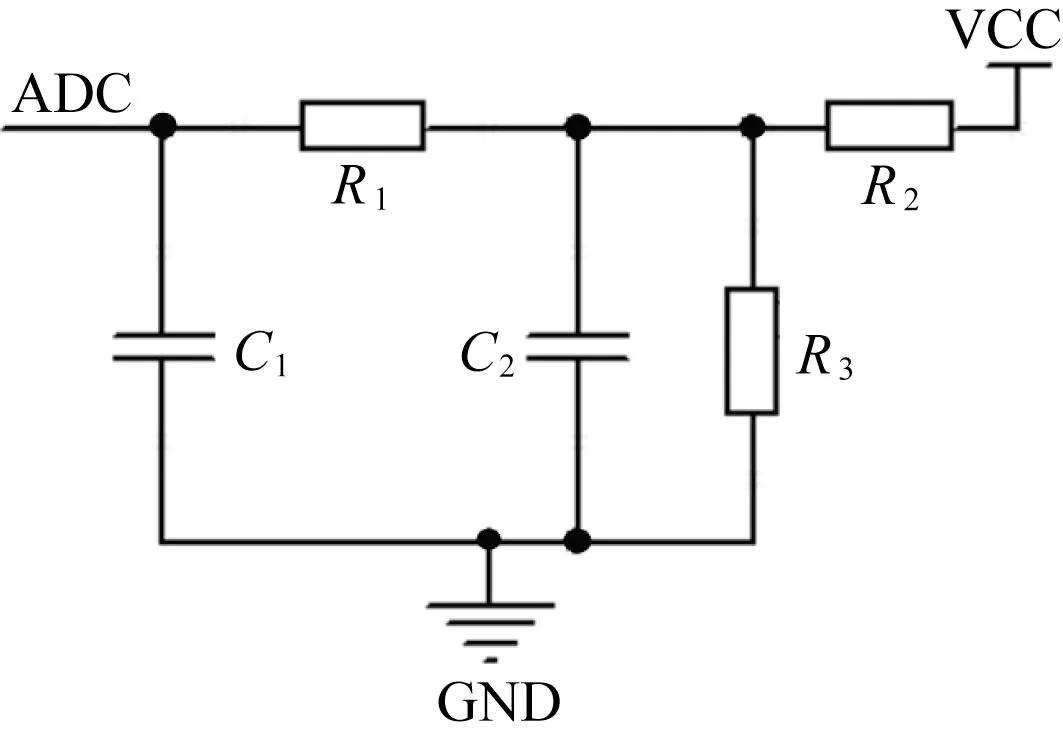
图2 蓄电池电压检测电路
系统在运行过程中,电路温度会随着流过电流的增大而升高,当温度升高到一定程度,极有可能烧坏电路元件,甚至危及整个控制系统。本文利用热敏电阻元件采集温度信号,当电路采样的电压降低时,说明电路温度升高,当电压值降低到设定阙值时,系统切断电流,采取相应的保护措施。
3 控制系统软件功能实现
本文利用DSP 软件CCS 对控制系统的软件程序进行编译。本系统采用模块化设计,通过主程序将各模块的功能进行整合。系统的主程序流程图如图3 所示,系统在初始化、自检结束后,启动机车电机,首先运行信号采集程序模块,分别对系统的电压、转速与温度等信号进行采集,再运行故障监测程序模块,通过检测数据与参考数值的对比判断系统的运行状况,实现实时的监测保护功能,最后运行系统的变频调速程序模块,通过检测到的转速实现系统的闭环反馈控制,保证调速的准确性与稳定性。

图3 系统主程序流程图
4 结束语
本文通过对比直流调速方式与交流调速方式,确定了系统的整体控制方案与控制策略,并且对系统的硬件部分与软件部分进行了设计。控制系统具有较高的稳定性与安全性,可实现煤矿机车的准确、高效、平稳运行。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2019年2期)2019-03-26
中国铸造装备与技术(2017年3期)2017-06-21
汽车维修与保养(2017年1期)2017-05-15
汽车维修与保养(2016年1期)2016-09-07
现代防御技术(2016年1期)2016-06-01
汽车维修与保养(2016年12期)2016-03-14
新高考·高一物理(2016年1期)2016-03-05
