
独居老人的辅助起卧床装置设计
2020-08-31 05:42周杰
机电信息 2020年20期

摘要:随着我国社会经济发展水平的不断提高,人口老龄化进程不断加快,独居老人逐年增加。老年人身体各项机能逐步下降,手臂和腰部力量不足,导致老年人在起床和卧床时会出现一定困难,很可能会进一步加剧老年人的腰肌劳损。针对以上问题,以老年人为服务对象,设计了一种辅助老年人起卧床的装置。该装置通过机电结合以及机构组合的方式,帮助老年人完成从躺在床上到坐起,再从坐起到站立这一系列动作,也可在老年人需要躺下时,通过装置的逆运作提供一定的辅助。该装置操作简单,充分解决了目前老年人腰臂力量不足导致的起卧床困难的问题。
关键词:独居老人;辅助起卧床装置;起背模块;曲腿模块;辅助起身模块
1 研究背景
随着城市化进程的加快以及我国进入老龄化社会,居住在城市中的高龄族群规模日益增大[1]。城市独居老人是特殊的老年人群体,因其生理、认知功能的退化,他们在日常生活起居方面会面临许多问题。大多数独居老人由于身体各项机能逐步下降,在日常的起卧床方面都出现了一定的困难,因此,亟需设计一款满足老年人需求的辅助起卧床装置,以帮助独居老人提高生活自理能力。
在2017年国务院办公厅印发的《关于制定和实施老年人照顾服务项目的意见》中提到:大力扶持专业服务机构并鼓励其他组织和个人为居家老年人提供生活照料、医疗护理、精神慰藉等服务。现阶段的辅助起卧床机械装置大多为医院里复杂的医疗床或需要其他人辅助操作的机械装置[2-3],不适用于独自生活起居的老年人。基于以上背景,本文设计了一款多功能辅助起卧床装置来服务老年人,能够辅助老年人独立完成起卧床,旨在帮助有基本活动能力的老年人减轻腰背负担。
2 装置整体介绍
本装置为辅助老年人起卧床的装置,如图1所示。装置整体主要由起背模块、曲腿模块和辅助起身模块3部分组成。起背模块主要采用四杆机构,使用舵机驱动,可将床上半部分旋转一定角度,帮助老人起背。曲腿模块由3个电动推杆构成,1号推杆控制推动大腿板向上旋转,2号、3号推杆带动小腿板旋转下放,辅助老年人完成曲腿动作。辅助起身模块由电动推杆推动滑块,带动整个床身倾斜至合适的角度,配合床身尾部的扶手,辅助老人站立。
该装置整体使用流程:当老年人处于平躺状态时,起背模块驱动,背部床板向上立起,带动老人上身抬起。同时,曲腿模块驱动小腿处床板下翻,使老年人小腿下垂,形成坐起姿势。随后,辅助起身模块驱动,使老年人由坐起姿势逐步调整至站立姿势。老年人抓住床身两侧的扶手,稍微使力,完成站立动作。躺下时,由扶手引导老年人站立至正确位置,床板抬升承接老年人,并辅助老年人至坐下姿势。随后曲腿模块与起背模块恢复至水平状态,完成辅助老年人平稳躺下的目的。
2.1 起背模块设计
起背模块主要由底部的推杆、推杆连接的杆件、滑块以及背部靠板组成,如图2所示,①为床的背部靠板,②为安装在背部靠板底部的滑块,③为连接滑块和推杆的连杆,④为推动背部靠板向上旋转的动力推杆。
底部的推杆是一个行程为150 mm的电动推杆,是将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置,底部推杆在电机的带动下推动杆件,连杆与电动推杆的连接处固定,滑块与连杆的连接处固定。连杆和电动推杆一端均有铰链,可绕铰链旋转。背部靠板上设有滑轨对滑块进行限位,使其只可在滑轨上进行直线运动,背部靠板的旋转角度为0°~70°,背部靠板旋转角度可由老年人自己控制。
装置运作时,电机正转驱动推杆向外推出伸长,由于电动推杆与连杆的连接处固定,随着电动推杆的伸长,连杆绕铰链向上旋转,带动滑块沿轨道向背部靠板轴处移动。连杆长度不变,在连杆铰链与背部靠板转轴的直线距离不变的情况下,连杆与铅垂线所成角度变小,则背部推杆与水平线所成角度必然变大,因此背部靠板必然会被向上推起,最终实现帮助老年人起背的目的。当完成起背动作后,床背部靠板需要下放时,则电机反转,使得推杆向下收回,杆件旋转角度变小,滑块滑动,沿轨道向远离背部靠板方向移动,使得背部靠板趋于放平。起背模块在一定程度上控制了背部靠板的角度[4-5],具有较强的稳定性和可靠性。
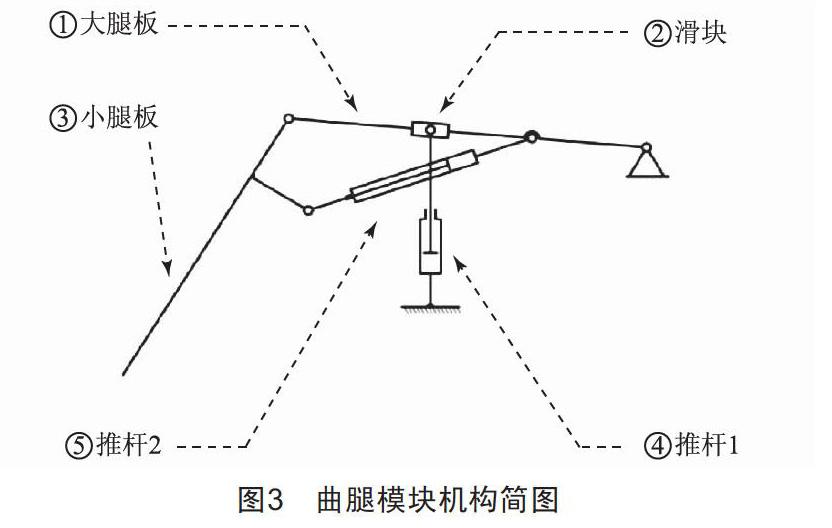
2.2 曲腿模块设计
该模块由大腿板、小腿板、滑块、推杆1和推杆2组成,如图3所示,①为大腿板,长度570 mm,②为滑块,③为小腿板,长度510 mm,④为推杆1,⑤为推杆2。其中,电动推杆1固定,与地面垂直呈90°,无铰链,只可定向伸缩。推杆1一端连接滑块,大腿板下设有滑軌对滑块进行限位,只可沿着滑轨做上下直线运动。推杆2一端连接一个固定在大腿板上的铰链,使其可以随大腿板运动,并绕铰链在一定角度内活动,另外一端通过连杆连接在小腿板上,连杆与推杆2的连接处可活动,但其与小腿板连接处固定,使得连杆与小腿板始终呈90°。
装置运作时,电机先驱动推杆1伸长,使顶端滑块在竖直方向增加一定高度,与此同时,滑块在大腿板底部滑槽内向远离大腿板转动轴的方向做直线运动,使得大腿板绕轴可向上旋转15°抬起,令大腿板和背部靠板形成一个角度,使人体微陷入夹角中,在床体抬升的过程中固定人体。同时,推杆1收缩,小腿板在其作用下向下垂落,转动75°,将老年人的小腿放下,且两腿部推板角度固定,最终将老年人安放至合适的坐姿,为接下来的床板抬升,帮助老年人站立做好准备。
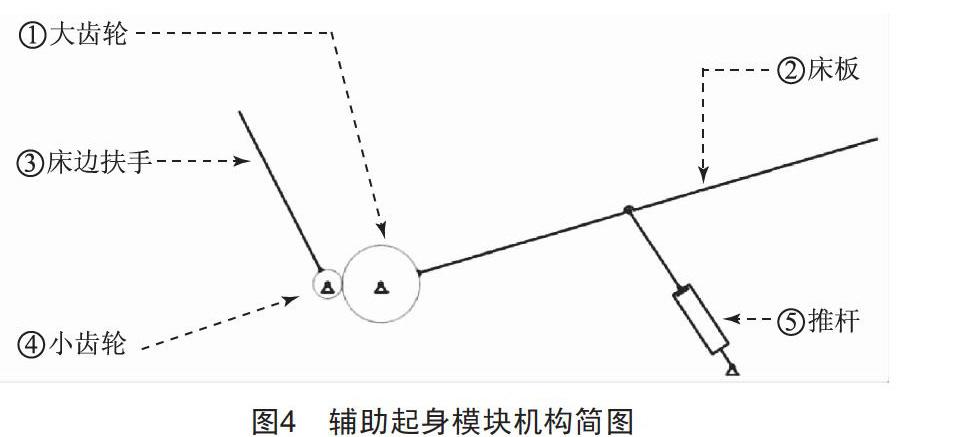
2.3 辅助起身模块设计
辅助起身模块机构简图如图4所示,该装置主要由①大齿轮、②床板、③床边扶手、④小齿轮以及⑤电动推杆组成。
当装置需要辅助老人站立时,电动推杆正转,推杆可以伸长将床板顶起一个角度,角度从0°~25°可调,确保老年人在起立时可以得到床板的助力。床板拟设计尺寸为长200 mm、宽120 mm、高50 mm。在床板抬升的同时,床边的扶手也同步升起,可以在老年人站立时受到助力以后利用旁边的扶手支撑。床边扶手的长度为660 mm,可以使老年人在使用床边扶手的时候得到最大助力。床边扶手与床板之间由一对大小齿轮连接。由小齿轮和床边扶手连接,让小齿轮控制床边扶手的旋转,而床板则由大齿轮控制,大齿轮的旋转决定了床板的旋转角度,大小齿轮之间正常啮合[6],大齿轮直径为113 mm,小齿轮直径为37 mm,通过一定的传动比使得当大齿轮转动1圈时,小齿轮转动3圈,当床板转动25°时,床边扶手转动75°,使老年人站立时能够最大程度地受到床板的助力,自己可以利用床边扶手站立。
3 结语
本文设计的适用于独居老人的辅助起卧床装置主要包含起背、曲腿以及辅助起身三大模块,可以大大减轻老年人独立起卧床时面临的困难。相较于现有的老年人辅助起卧床装置,本文设计的装置具有以下优势:(1)利用电动推杆、齿轮等,实现了辅助老年人起卧床时的起背、曲腿以及起身功能,可以有效减轻老年人的腰背负担。(2)装置采用连杆机构与齿轮机构的匹配设计,用简单的结构即可满足老年人起卧床时的所有需求,相比于现在一些专业的、繁琐的起卧床机械结构更简单、效率更高,具有广阔的发展前景。
[参考文献]
[1] 徐兴,胡飞.基于城市社区高龄者生活型态的用户角色构建设计研究[J].包装工程,2018,39(2):8-12.
[2] 王显芳,王述洋,王晓东.老年产品的人性化设计[J].林业劳动安全,2006,19(4):36-38.
[3] 姜生元,胡艳娟,李建永,等.智能化多功能电动康复床的研制[J].机械设计,2008,25(5):61-62.
[4] 任怡,张峻霞,薛强,等.可站立式电动轮椅机构设计及运动学仿真[J].机械设计,2009,26(3):43-45.
[5] 张少茹,陈万强,张毅,等.多功能医用病床的研究[J].中国康复,2010,25(5):392-393.
[6] 张建国,谭云丽,薛强.基于人机工程的多功能护理床设计[J].制造业自动化,2010,32(6):88-90.
收稿日期:2020-07-07
作者简介:周杰(1999—),男,湖北浠水人,研究方向:辅助起卧机械。
