
直角坐标机器人控制系统设计与研究
2020-08-31 05:42王鑫许晓安杨裕才谢天杰
机电信息 2020年20期
王鑫 许晓安 杨裕才 谢天杰
摘要:简要阐述了直角坐标机器人控制系统设计原理,详细分析了直角坐标机器人控制系统的设计要点,以期能够提高机器人控制系统的运行稳定性,满足不同的工业生产需求。
关键词:直角坐标机器人;控制系统;软件设计;硬件设计
0 引言
我国工业生产方式不断升级,机械化生产逐渐取代了人力生产,同时,科技发展进一步推动了工业机器人的开发。其中,直角坐标机器人凭借其结构简单、成本低廉以及控制便捷的优势,在工业生产中得到了广泛应用。直角坐标机器人能够稳定完成搬运等工作,提高了工业生产效率。
1 直角坐标机器人控制系统设计原理
直角坐标机器人主要应用于工业生产中,机器人可以自动化控制、重复编程,具有较高的自由度,能够完成三维空间内的指定运动,在此基础上完成各类搬运工作。本控制系统主要设计要点:(1)控制计算机,负责调度指挥控制系统。(2)示教盒,负责设定工作轨迹及参数,使用串行通信方式完成人机交互。(3)操作面板,设计多种功能按键和指示灯,完成人工控制。(4)硬软盘储存,负责储存工作程序。(5)输入输出模拟量,输入并输出控制状态及指令,让机器人按照程序和命令完成动作。(6)接口,包括打印机、传感器、网络、Ethernet等,能够将信号和数据传输至控制系统,辅助功能的实现。(7)其他辅助设备,负责配合控制系统,完成机器人的动作控制。
在工业生产中,直角坐标机器人具有功能多、应用灵活等优势,可以实现高精度、高速度运行,即使在恶劣的环境中仍然能保持高效工作[1]。
2 直角坐标机器人控制系统的设计与实现
2.1 设计思路与框架
直角坐标机器人设定4个自由度,能够带动特定机械手沿着X、Y、Z轴水平移动,Z轴抓手能够旋转。机器人4个关节受4个伺服电机驱动,下位机发送脉冲信号控制电机,从而精准控制机器人。启动机器人后,上位机采集传感器信号,可以对机器人末端进行控制,夹紧物料。Z轴伺服电机可以带动齿轮运动,从而带动抓手向上运动,上升至限位传感器,X轴以及Y轴电机做直线插补运动,结束后,抓手运动至目标上方,伺服电机反向控制运动,抓手向下抵达目标位置,完成整体目标运动。
2.2 软件设计
2.2.1 设计流程
硬件作为系统载体,机器人的功能作用主要依赖于软件系统,软件设计效果决定了机器人的功能性。直角坐标机器人控制软件按照软件设计流程设计。明确软件功能性,根据直角坐标機器人的动作设计,分析软件系统功能,形成整体框架。根据分析软件功能,设计程序流程;分配I/O和寄存器地址,进行程序编写,并优化程序。编译转换编辑区程序、生产执行文件,对程序正确性进行检验,按照提示对程序进行修改。机器人在调试环境下进行模拟运行,检查程序功能,若无法满足功能要求,返回检查程序,进一步优化程序。如果满足调试环境要求,需连接机器人进行调试,观察机器人动作是否满足功能要求,直至机器人完全满足功能要求,完成软件设计。
本机器人使用PLC控制系统,该系统具备数字运算系统,使用可编程储存单元进行内部顺序控制,通过数字或模拟方式输入输出,使机械设备正常运行。PLC开发了界面图形化功能,便于系统扩展,抗干扰能力强。使用PLC控制系统的直角坐标机器人操作简单,具有较强的承载能力,运行稳定,同时,投入成本较低,能够实现精准定位。
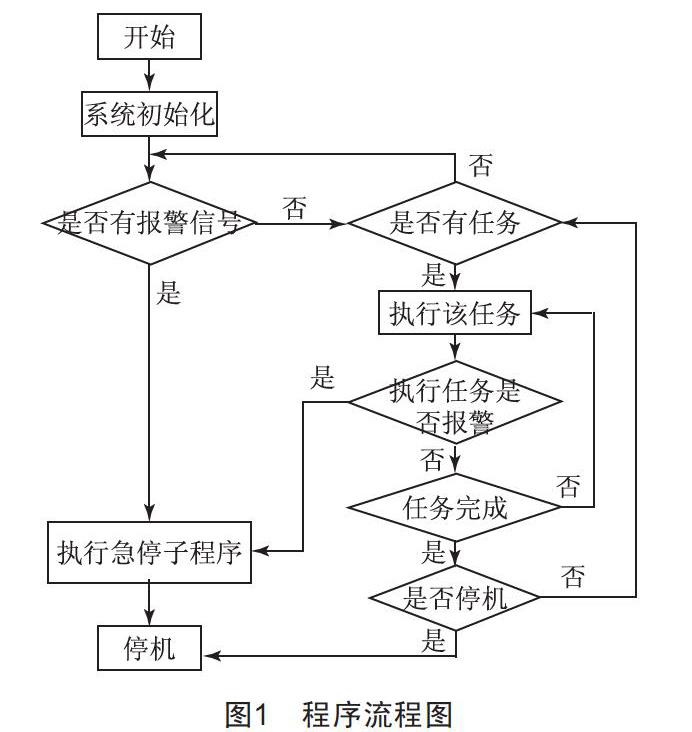
2.2.2 程序流程
程序流程图如图1所示,为保证达到设计目标,需要提高程序流程的逻辑性,保证功能齐全,降低程序出错率。
2.2.3 界面设计
界面作为操作机器人的渠道,用于传达控制指令,监控机器人运行状态,保证机器人功能的实现。本系统设计界面主要包括初始化界面、功能窗口以及主操作界面,主要完成机器人示教、系统监控、参数设定以及系统初始化等功能。主控界面包括命令按钮,具有四轴联动、单轴操作、初始化操作等功能,通过选择不同选项,机器人按照命令执行,完成相应功能[2]。
在系统界面上可选手动运行模式和自动运行模式。手动运行模式下,可人工调整任意轴的位置及方向,让机器人实现随意运动,同时,手动运行可以设定运动轨迹,联合多轴实现协同运动,设定复杂的机器人运动轨迹。自动运行模式要点击程序控制卡,发出信号控制伺服电机,对机器人X轴和Y轴进行联合控制,到达工件指定位置,通过控制气缸开关,抓取或释放工件,完成机器人搬运工作。在自动运行模式下,启动程序可实现机器人自动工作,按程序完成工作内容。
2.2.4 路径规划
系统通过计算运动空间对机器人运动进行控制,建立坐标系,通过各轴运动顺序及时间对运动进行控制,避免和设备发生碰撞。机器人完成取放料为一套动作流程。机器人搬运动作的顺序为X轴、Y轴、Z轴。机器人完成搬运任务后,X轴和Y轴停留在最后动作位置,Z轴回归原点。所有路线规划均需要以坐标系原点为核心,在机器人运动单元上,每个轴均要有传感器,用于调整和设置参考点,也就是原点位置。在应用机器人前,需要设计回零指令,让机器人能够回到原点位置。控制卡检测到原点信号后,滑块会自动停止运行,启动指令,机器人回归到原点位置,等待下一次工作。
2.3 硬件设计
直角坐标机器人控制系统采用多轴多角度同步运动方案,硬件系统包括触摸屏、位置控制模块、速度检测模块以及执行机构等[3]。机器人控制系统的控制器性能好,具有较高的稳定性,数据处理速度更快。自动化程序完成伺服电机驱动后,对其他数据进行处理。机器人控制系统采用电源模块、位置模块、CPU模块以及通信模块等。其中,CPU模块作为系统核心模块,对运动模块进行控制,运动模块接受CPU发出的命令,生成各种插补轨迹。根据输出脉冲串数量,控制电机旋转角度,根据脉冲串输出,对电机转速进行控制,编码器反馈实现闭环控制。直角坐标机器人由PLC发送脉冲指令,驱动伺服电机启动,带动机器人运动,完成相应功能。伺服驱动电机包括电源、电机连接器等。电机连接器和伺服电机相连,并连接PLC。编码连接器接收反馈信号。
3 结语
本文对直角坐标机器人的控制系统进行了设计,提高了机器人运行的稳定性,根据不同生产需要,可通过调整控制程序,满足工业生产需要。该系统通过现场采集I/O数字量,能够发出脉冲信号控制电机,对机器人动作进行精准控制,实现精准定位。
[参考文献]
[1] 李浩,卢军,孙姝丽.基于视觉引导的直角坐标机器人轨迹规划研究[J].组合机床与自动化加工技术,2019(12):65-69.
[2] 马星辉.多轴直角坐标搬运机器人的通用控制方法研究[J].机电信息,2019(35):164-165.
[3] 陈彦宇,田东庄,许翠华,等.基于PLC直角坐标式机器人控制系统的设计[J].自动化仪表,2018,39(4):42-45.
收稿日期:2020-06-24
作者简介:王鑫(1983—),男,河南信阳人,工程师,从事工业机器人研究和企业管理工作。
猜你喜欢
科教导刊·电子版(2016年26期)2016-11-21
电脑知识与技术(2016年25期)2016-11-16
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年20期)2016-09-29
