
基于无人机序列图像的室外场景三维重建技术分析
2020-09-06 10:25周子宁
江西建材 2020年8期
周子宁
南昌大学 建筑工程学院,江西 南昌 330031
0 引言
随着信息化社会不断发展,三维场景的应用越来越广泛。除了采用数学的方法建模,近几年采用非接触式设备扫描真实场景的方法日益成熟。无人机可以利用倾斜摄影技术拍摄二维图像来重构三维场景,目前已经活跃在监测自然灾害、土地与水资源调查、城市规划等领域中。
1 无人机概述及工作流程
1.1 多旋翼无人机
它是一种具有三个或三个以上旋翼轴的无人驾驶机。每个轴上都安装有电动机来带动旋翼产生升推力。它的操控性强,可垂直起降和悬停,并且可以通过调节旋翼之间的相对转速来控制飞行器的飞行轨迹,以便适应复杂狭小的环境。与传统的直升机相比,多旋翼无人的及机身机械结构简单、紧凑,可以飞至离目标很近的区域。大疆精灵4RTK版安装有GPS和飞行控制系统,小型无人机较差的抗风性能可以因此得到补偿。
1.2 无人机航拍工作流程

图1 无人机图像系统工作流程图
首先是规划路线阶段,即在起飞前对无人机设备进行检查和调试,对航拍路线进行规划,设定自动返回地点。再是任务执行阶段,规划路线完成后无人机起飞,对已设定的目标进行摄像,并用大疆精灵4RTK版自带的RTK获取图像位置信息。使用者需不断确认飞行高度、电池电源和航拍图像,并根据图像调整无人机和照相机。最后是航拍图息处理阶段,在完成航拍任务后,进行对图像的预处理,以减少图像冗余和重复率。主要内容是筛选图像关键帧,消除畸变和模糊等因素的影响,提升重建的效率和精度。
2 用南方银河1RTK电台获取被测点位置信息
2.1 RTK概述
RTK有基准站和流动站两个站台,它们通过高效协作能够获得厘米级的定位结果。且与传统的测量方法不同,它不需要事后解算而能实时获得结果,提高了作业效率。
2.2 RTK基准站工作流程
利用RTK获取控制点位置信息的流程主要包括:仪器架设,新建工程,求转换参数,已知点检核和测量。仪器架设完成和新建工程后,将已知控制点的坐标录入站点并求转换参数。基准站接收测站信息并将其通过数据链传输给流动站,流动站将信息与GPS定位数据差分,并实时给出差分后的结果。
3 三维重建原理
针孔模型
可以用一个模型来描述相机将三维坐标点映射到二维平面上的结果,这个模型有很多种,其中最简单的是针孔模型。它由刚体变换和透视投影变换组成,但不包括相机畸变。
3.1 畸变模型
径向畸变、离心畸变和薄棱镜畸变等都属于畸变模型。径向畸变主要是由镜头的形状缺陷造成的,而离心畸变和薄棱镜畸变主要成因是光学器件的加工和安装误差。针孔模型能尽可能满足实际应用的需要,但在考虑实际问题时应加上各种镜头畸变。
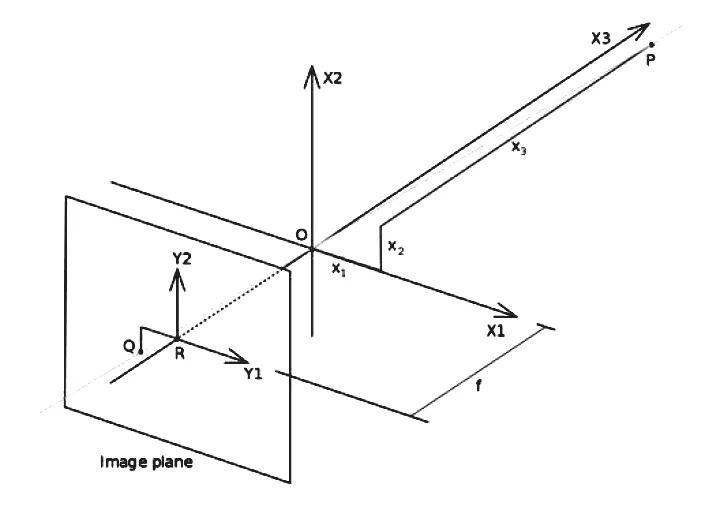
图2 针孔相机模型示意图
3.2 多视图几何
相机之间的相对运动和立体场景在图像上的约束关系是多视图几何所研究的。因为无人机航拍图像序列在时间和空间上具有很大的重叠性,若缺少约束则易重构出摄影重构。在重构算法中使用捆扎调整[1]可以最使重投影误差最小化。
4 图像序列三维重建技术步骤
4.1 关键帧筛选和特征点匹配
传统的TMOF等算法需要计算每张图像与特征点的匹配关系,花费时间很大。利用分层筛选[2]可以提高关键帧筛选效率。首先粗略筛选出图像质量、清晰度存在问题的图像。再根据其重叠度,基线宽度等因素对图像进行精细筛选。最后用基于直线区域先验的特征提取方法[2]匹配特征点。
4.2 相机参数估计与稀疏重建
对相机位置的估计和稀疏点云重建主要涉及了SFM[3]技术,即从运动恢复结构。他是一种可以将图像的各个特征点进行匹配,并利用空间三角形测量计算方法得出场景位置的技术。SFM从图像序列恢复稀疏三维点云数据,并利用捆集调整进行参数优化。
4.3 稠密重建
稠密重建的核心技术是MVS技术[4],它可以获取同一个物体不同角度上的图像并进行三维立体重建,但只能对出现在两幅或多幅图像上的部分进行三维建模。主要分为三步:原图像匹配、范围扩展、范围滤波。
4.4 点云模型建立
获得稠密的三维点云后,把点云模型进一步网格化以得到目标的三维模型。利用Google earth建立目标模型区域,并与模型匹配去除区域外的模型。再导入RTK测量的位置信息来优化目标三维模型坐标,以提高该模型精度。
5 结束语
从上文可见,结合无人机航拍图像和基于序列图像的三维重建技术能够有效的解决室外场景三维重建的问题。RTK可以提高航拍图像位置信息的精度,而合适的关键帧筛选和特征点匹配方法能提高建模效率。但是,三维模型重建还有许多问题亟待解决,还有许多技术难题需要克服。这些难关极具挑战性且意义重大。
猜你喜欢
重庆科技学院学报(自然科学版)(2022年6期)2022-02-04
花火·慧阅读(2021年2期)2021-09-10
微型电脑应用(2020年12期)2020-12-25
东南大学学报(自然科学版)(2020年1期)2020-01-16
表面工程与再制造(2019年3期)2019-09-18
沈阳理工大学学报(2019年3期)2019-08-21
图学学报(2018年3期)2018-07-12
摄影之友(影像视觉)(2017年10期)2017-11-07
中国铁道科学(2015年4期)2015-06-21
红领巾·萌芽(2015年4期)2015-06-15
