
基于RRT*算法的自主代客泊车路径规划仿真与分析
2020-09-06 14:09刘猛华蕾花逸峰谢军
时代汽车 2020年14期
关键词:算法
刘猛 华蕾 花逸峰 谢军


摘 要:本文采用RRT*算法和三次樣条曲线规划出一条从起始点到目标车位的可行平滑路径,然后基于Matlab对其进行仿真与分析。仿真结果表明,该算法能够有效地在停车场这类半结构化环境中规划出一条满足车辆动力学和运动学的可行路径,同时使用三次样条曲线进行平滑拟合,使规划出的轨迹更加平顺光滑,以减少不必要的横向摆动。
关键词:自主代客泊车 局部路径规划 RRT*算法 三次样条曲线
1 引言
自主代客泊车路径规划是根据研究人员对其所设定的某种具有可选择最优路径规划法则,规划出一条从落客点(起始点)到目标车位的最优且安全无碰撞路径[1-3]。国内外学者对其已进行了大量的研究并取得了一些成果。但同时也存在着一些问题,例如在面对复杂环境时算法的概率完备性不佳、搜索时间长、适用范围小等,以及方案所使用的平滑曲线效果不佳。为了解决上述问题,本文针对自主代客泊车场景下智能车辆的局部路径规划问题,采用RRT*算法和三次样条曲线的方式进行车辆入库局部路径规划,并在Matlab平台上进行仿真实验与分析。
2 基于RRT*算法的自主代客泊车路径规划仿真与分析
2.1 仿真场景搭建
本文所使用的停车场环境地图由三个栅格图层构成:1)固定障碍物图层,该层包含固定障碍物,例如墙壁和停车场边界等;2)道路标图层,该层包含与道路标记有关的占用信息,包括车位的道路标记等;3)停放汽车图层,这一层包含有关已经占用了的停车位的信息,本文额外在停车场道路上加入了暂停车辆信息。每个图层都包含不同种类的障碍物,深色部分代表障碍物,而浅色部分代表可自由行驶区域,通过这种结构可以独立地处理、更新和维护每一层。将三个图层合并后生成停车场成本图如图1所示,停车场空间尺寸为7550。
停车场成本图将停车场环境表示为2D占用网格,单元中的每个网格的值都在0到1之间,表示在单元中行驶的成本,障碍物的成本较高,而自由空间的成本较低。
2.2 仿真结果与分析
首先给定全局路线使车辆行驶至泊车准备位置,因此设置了如图2所示的4个中间位置,使车辆依次通过这些位置到达泊车准备位置Goal 4,其坐标为(53,38)。
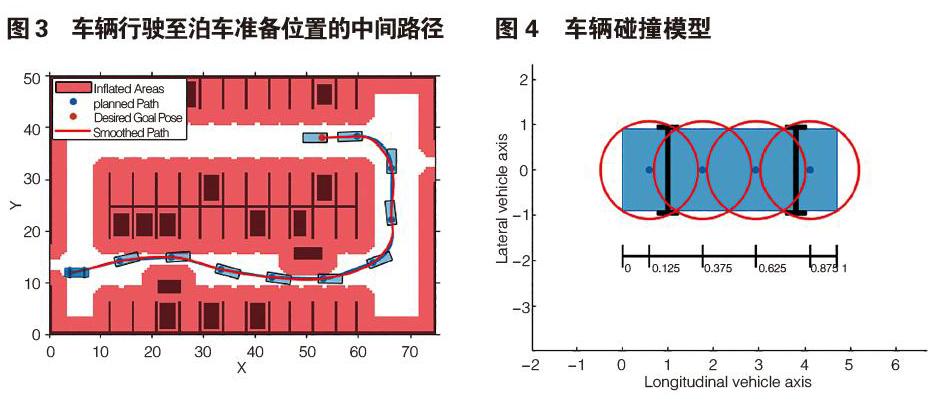
本文将车辆模型简化为长4.8宽2的蓝色矩形块,车辆的最大转向角设置为35°。由于从停车场入口位置Goal 1到泊车准备位置Goal 4这一段路径中并不需要较大幅度地调整位置,故最小转向半径设置为20,RRT*算法的最小迭代次数设为1000,采样点之间的拟合方式选择Dubins曲线。执行路径搜索与路径平滑循环得出搜索路径与平滑路径对比图如图3所示,图3中蓝色路径为搜索路径,红色路径为平滑处理后的路径。
在到达泊车准备位置后为了适应泊车所需条件,本文对一些参数进行了修改,包括将最小转弯半径设为12以方便进行微小调整,同时将采样点之间的拟合方式换成Reeds-shepp曲线以完成倒车入库操作。车辆在泊车过程中的碰撞检查是通过将成本图中的障碍物膨胀充气后检查车辆碰撞模型的圆心是否位于膨胀的网格单元上来实现的,车辆的碰撞模型由四个圆圈组成,使其更加容易地通过狭小区域,车辆的碰撞图形如图4所示。
碰撞检测完成之后车辆进行泊车入库操作,泊车目标位置坐标为(49,47)。本文将pathPlanner RRT函数的连接距离参数修改为1,这样可以使车辆模型的显示更加紧凑从而更直观的表示车辆行驶轨迹。车辆首先从泊车准备位置斜向前方行驶一段距离后进行倒车入库操作,具体路径如图5所示,其中(a)为搜索路径,(b)为平滑后的路径。两者进行比较可发现平滑后的路径车辆摆动幅度较小更加平顺光滑。
3 总结
本文通过基于RRT*算法的PathPlanner
RRT函数在Matlab平台上实现了自主代客泊车路径规划。在环境建模时,本文在道路上加入了暂停车辆从而模拟了车辆的直行避障场景;在得出搜索路径后使用三次样条曲线进行路径平滑,提高了路径的平顺性;在进行泊车入库操作时,本文将车辆模型的连接距离调整为1,使得车辆模型的显示更加紧凑,并将最小转弯半径调整为12,以便车辆在小范围内调整姿态,最后生成搜索路径与平滑路径。
参考文献:
[1]钱燮晖,何秀凤,郭俊文,等.基于二次A算法的复杂环境下车辆导航路径规划方法[J].甘肃科学学报,2020,32(2),7-15.
[2]高奇. 无人驾驶自主代客泊车路径规划与跟踪控制策略研究[D]. 西安:长安大学,2019.
[3]KLAUDT S,ZLOCKI A, ECKSTEIN L. A-priori map information and path planning for automated valet-parking[C].IEEE Intelligent Vehicles Symposium,2017:1770-1775.
猜你喜欢
海南金融(2022年3期)2022-04-14
湖北教育·教育教学(2022年3期)2022-03-28
语数外学习·高中版中旬(2021年12期)2021-03-09
中学生数理化·高三版(2020年11期)2020-12-30
中国计算机报(2020年31期)2020-09-08
阅读与作文(英语初中版)(2019年8期)2019-08-27
中学生数理化·高一版(2019年1期)2019-06-26
科学导报(2019年78期)2019-01-07
中学生数理化·高一版(2017年1期)2017-04-25
中学生数理化·高一版(2017年1期)2017-04-25
