
浅谈工业机器人启停控制方法
2020-09-06 13:28吴金旭张亚军师彦超陈争光毕平安
汽车实用技术 2020年16期
关键词:启动
吴金旭 张亚军 师彦超 陈争光 毕平安


摘 要:随着工业4.0技术革新的到来,工业机器人在制造行业的应用得到广泛普及,汽车行业尤为明显。目前国内外的机器人品类繁多,而且针对不同用途(焊接、搬运、喷涂)采用不同品类、特性的机器人,一个主机厂可能拥有3类以上品牌、型号的机器人。因此需要设备人员掌握相应技术特性。文章着手对机器人启停控制系统的梳理,归纳总结出不同类别机器人的通用技术特点,搭建底层控制逻辑,为设备工程人员开展现場安装调试、预防维保提供参考。
关键词:启动;停止;再启动
中图分类号:U462 文献标识码:A 文章编号:1671-7988(2020)16-228-04
Abstract: With the advent of industry 4.0 technology innovation, industrial robots have been widely used in the manufactur -ing industry, especially in the automobile industry. At present, there are various kinds of robots at home and abroad, and robots of different categories and characteristics are used for different purposes (welding, handling and spraying). A main engine factory may have more than three types of robots of different brands and models. Therefore, equipment personnel need to master the corresponding technical characteristics. This paper starts to sort out the robots start-stop control system, summarizes the general technical characteristics of different types of robots, builds the underlying control logic, and provides references for equipment engineers to carry out on-site installation, debugging, prevention and maintenance.
Keywords: Robot start; Robot stop; Robot restart
CLC NO.: U462 Document Code: A Article ID: 1671-7988(2020)16-228-04
1 机器人启动控制
机器人的伺服上电主要为手/自动两种模式,手动模式下,安全回路正常时(因为要手动示教,安全门在此模式下可以不启用)按下机器人的伺服准备按钮,机器人处于待机状态,按下示教启动开关,伺服使能开始示教。自动模式相对复杂,本文重点讲解在自动模式下的机器人启动控制逻辑。
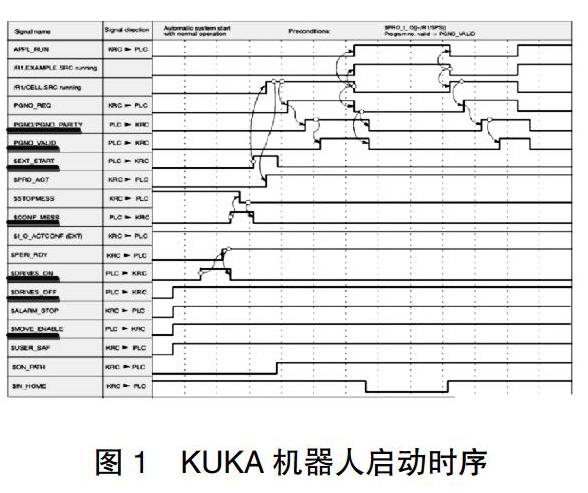
1.1 KUKA机器人启动
1.1.1 伺服使能—DRIVEON/OFF
初始状态下,机器人在HOME位,DRIVE_OFF要一直给定ON的信号,DRIVE _ON是在机器人自身安全回路、外部光电、光栅OK且PRI_RDY为OFF时,05s之后接通。当0.5s接通之后,PRI_RDY反馈为ON,此时DRIVE_ON置为OFF。
1.1.2 动作可能—MOVE_ENABLE
在没有外部急停(安全门、光栅、扫描仪等)故障时,发MOVE_ENABLE信号且一直为ON 的信号。MOVE_ ENABLE为ON,且STOP_MESS信号反馈为1时,延迟50ms后PLC发给机器人脉冲信号CON_MASS(当CON_MESS为1时,STOP_MESS会被置位0)。
1.1.3 Submit程序解释器启动—Cell程序运行
在自动模式下,STOP_MESS为0且在HOME位,机器人执行程序激活(PRO_ACT)反馈为0时,机器人准备OK(PERI_RDY),按下启动按钮信号,EXSTART发出脉冲信号,PRO_ACT被置为1。
1.1.4 用户程序执行
机器人发送程序号请求,PLC将车型号发送给机器人,并比对机器人反馈的程序号与PLC发送的程序号,程序号一致则由PLC发出PGNO_VALID,机器人开始执行用户子程序。
1.1.5 自动模式下的循环执行
在无外部异常情况(急停安全类故障、一般性故障)时,MOVE_ENABLE信号常ON,DRIVE_OFF信号常OFF,DRIVE _ON首次启动为脉冲信号,机器人运行时为常OFF,STOP_MASS信号为OFF,PRO_ACT为常ON信号,PGNO_ REQ和PGNO_VALID信号间隔性通断。
1.1.6 机器人再启动
当机器人出现外部异常情况(急停安全类故障、一般性故障)时,在机器人的内部STOP_MASS信号为ON,MOVE_ENABLE信号为OFF,EX_START信号被复位,但是ON_PATH和PRO_ACT信号不受影响,一直为ON的信号,此时需要我们将异常情况解除,故障复位后,MOVE_ENABLE信号为ON。
1.2 安川机器人启动
图2为安川机器人启动时序,类比ABB机器人,除伺服使能和外部启动外,两者都可以不用MOVE_ENABLE动作可能信号(动作可能的意义就是在其信号为OFF时,机器人处于停机状态,安川与ABB通过与PLC建立STOP指令来实现的,这个异曲同工),安川机器人的伺服使能和外部启动可以用硬线连接控制(如图3所示)。
另外安川机器人的MASTER程序是需要提前用户来建立和定义的,建立后方可编程。
1.3 ABB机器人启动
ABB启动控制相较KUKA更直观,核心点就是MOTOR _ON,MOTOR_OFF用于伺服上电使能,CYCLE_START用于动作可能(程序循环开启),在这里也可不配置此信号点直接用示教器上面的启动按键做动作可能, EX_START用于MAIN(CELL)程序启用,当接收到PLC发生的程序号及校验有效时,机器人执行用户程序。
1.4 NACHI机器人启动
NACHI启动参考KUKAD 启动时序,其中NACHI机器人作为固定信号输入输出不可变更,通用信号输入输出部分可以根据现场需要在“输入输出信号”中设定相应的信号点,比如程序号、启动、停止信号。关于程序扫描类比KUKA,做了一个“外部个别停止”等同于MOVE_ENABLE和CYCLE_START。
1.5 机器人启动总结——核心前置三要素
1.5.1 伺服使能
首先机器人要启动,核心就是机器人伺服使能(无论是DRIVE_ON、MOTOR_ON,还是SEVER_ON),它是驱动硬件系统的硬性需求,在伺服使能状态下,各机器人轴电机励磁,制动抱闸打开。
1.5.2 动作可能
在伺服使能过后,自动模式运行情况下,通过(MOVE -ABLE、外部个别停止、CYCLE_START等命令)让机器人系统启动起来,当出现一般性停止时(第二章节讲到),上述信号置为OFF,机器人斜坡停止,无抖动现象。
1.5.3 机器人外部启动
当机器人伺服使能、动作可能都OK时,PLC满足其他条件后会给机器人发EX_START信号(这一点所有机器人都是相通的),机器人进入MAIN循环程序,此时机器人并不执行用户程序,当接收到PLC发送的程序号且校验程序号有效之后才开始执行用户程序。
2 机器人停止控制
2.1 KUKA机器人停止
KUKA机器人的停机模式可分为安全类故障和非安全类故障停止,安全停止0和STOP0的安全等级最高,并依次降低,等级越高对机器人的动态制动响应越快速,制动越快不仅会导致其本体的抖动,对机械传动系统也存在损伤,所以应尽量避免高等级故障停止的发生。
2.2 安川机器人停止
安川机器人的停机方式也有以下几种原因:
2.2.1 暂停操作
执行暂停后,机器人暂时停止,暫停可用如下装置上的 [Hold]完成,它可以通过示教编程器(白色暂停按钮)、外部输入信号(PLC与机器人的IO配置STOP信号点)。
2.2.2 急停操作
急停操作后,伺服电源被切断,机器人立即停止,它可以通过安全门、示教器、外部输入信号(这里的外部输入信号给定的急停往往都是来自PLC的安全输出模块)。
2.2.3 报警引起的停止
动作过程中发生报警后,机器人会立刻停止动作。示教编程器上显示出报警画面,通知用户由于报警引起了停止。
2.2.4 其他停止
再现过程中,从再现模式切换到示教模式时机器人立即停止,执行 PAUSE 命令,使机器人暂停。
2.3 ABB机器人停止
将安全面板的XS9的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态,AS1与AS2要分别单独接入无源NC常闭触点,AS1与AS2要同时使用。
将安全面板的XS7与XS8的第1脚与2脚的连接断,机器人就会进入紧急停止状态。ES1与ES2要分别单独接入无源NC常闭触点,ES1与ES2要同时使用。
将安全面板的XS9的5脚与6脚、11脚与12脚的连接断开,机器人就会进入自动停止状态。AS1与AS2要分别单独接入无源NC常闭触点,AS1与AS2要同时使用。
2.4 NACHI机器人停止
NACHI与 KUKA机器人的停机方式相近,分为安全类停机与一般故障类停机,安全类停机中也是通过安全电路板与外围安全装置连接,可以通过PLC安全模块互联或者是安全继电器触点连接。
2.5 停止总结—常见停机分类
2.5.1 一般性故障停机
当PLC发送给机器人的动作可能信号由ON置为OFF时,机器人以及附加轴沿轨迹的制动斜坡制动,此时伺服驱动系统不会关闭,制动器不制动,伺服电机处于励磁等待状态,机器人减速平稳停机,无抖动现象。
2.5.2 高级故障停机
当机器人控制系统内部与安全无关的部件出现内部故障,则驱动系统立即关闭,制动器制动,机器人在额定位置快速制动,本体存在抖动现象(如电机过负荷、编码器异常等故障)。
2.5.3 安全性停机
当机器人安全控制系统或外围安全设施异常时,驱动系统立即关闭,制动器制动,机器人快速制动,这种停机方式会使得机器人瞬间停机,存在抖动现象。
3 机器人停机再启动
当机器人因为各种原因停机后,再启动首先需要对机器人停机的原因查明并解除相应故障风险点,按下RESET键(可以是PLC或者示教器,视具体情况来定)使机器人满足再次开启的前置条件,再启动与首次启动不同,因为绝大部分情况机器人已经不在HOME位置而是在运行过程中(运行轨迹程序或是逻辑程序),这个需要PLC的再启动逻辑并行控制机器人的启动指令,当故障解除且复位后再次按下启动键,并可再次运行机器人。
4 结论
机器人启停控制中,虽然不同品牌的机器人各有特点但是其核心的逻辑架构是一致的,无论是前期设计调试还是后期故障维保,抓住主线,摸清脉络就能准确、快速的解决疑难问题,以上是作者对工业机器人启停动控制逻辑的一些浅见,文章描述过程中不免有不足之处,敬请同行给予指正。
猜你喜欢
电脑爱好者(2020年13期)2020-08-17
作文·初中版(2020年4期)2020-05-03
环球时报(2017-03-30)2017-03-30
中国汽车市场(2016年7期)2016-05-14
农家科技(2016年1期)2016-03-03
新高考·高一物理(2015年3期)2015-08-20
环球时报(2014-08-02)2014-08-02
科技致富向导(2013年19期)2013-11-19
数码世界(2009年12期)2009-12-11
科学种养(2009年9期)2009-11-26
