一种便携式角速度传感器
2020-09-08 08:44朱国斌
计量学报 2020年8期
朱国斌, 赵 浩
(1.嘉兴南洋职业技术学院, 浙江 嘉兴 314001; 2.嘉兴学院 南湖学院, 浙江 嘉兴 314001)
1 引 言
角速度是旋转系统或传动装置进行状态监测的重要参数。旋转设备产生故障或者受到外界环境影响时,会以角速度变化的形式体现出来。因此,关于角速度的实时监测具有重要的实际工程应用价值,已经广泛应用于军事、航天、汽车电子等多个领域[1~5]。角速度测量可以分为直接测量和间接测量,间接测量是通过角位移传感器获取角度信息,再经过微分处理获得角速度值[6~7],但会造成时间延迟和噪声放大等不易解决的问题,因此,如何直接获取角速度值就显得尤为重要。文献[8]研制了一种电磁感应式角速度传感器,除了采用零相位检测技术外,还利用磁感应线圈对旋转磁场的反馈原理,同时测量低转速和高转速工况下的角速率;文献[9~11]对一种磁流体角速率传感器(MHD ARS)进行了研究,通过有限元仿真进行了结构优化,分析了MFI效应对传感器的影响,以及对传感器误差的评估方法;文献[12]设计了一种环形谐振腔式角速度传感器,讨论了弹性波惯性作用下微机械陀螺环形谐振腔振动的动力学和控制问题,提出了一种以微分方程形式建立物理振动包络模型的方法,为直接测量闭环陀螺仪的性能研究提供了支撑;文献[13]给出了一种实用的陀螺转轮全工作范围角速度估计方法,角速度可以通过陀螺转轮的测量值(包括倾角、转速和转矩线圈电流)、神经网络的权值和偏差来确定。
本文提出一种基于霍尔效应的便携式角速度传感器[14],可以直接测量被测旋转机械的角速度,使用时只需要将被测转轴夹紧即可,无需其他机械部件,具有较强的实用性;此外,本文设计的角速度传感器无旋转部件,不会对原有旋转系统的转动惯量产生影响,能够无失真地传递被测旋转机械的角速度,具有较好的动态响应特性。
2 便携式角速度传感器的设计
2.1 机械结构
设计的便携式角速度传感器,其机械结构如图1所示,包括上支架1、上铁心组件2、上霍尔组件3、上磁钢组件4、下支架5、下铁心组件6、下霍尔组件7、下磁钢组件8、轴承9和铆钉10。
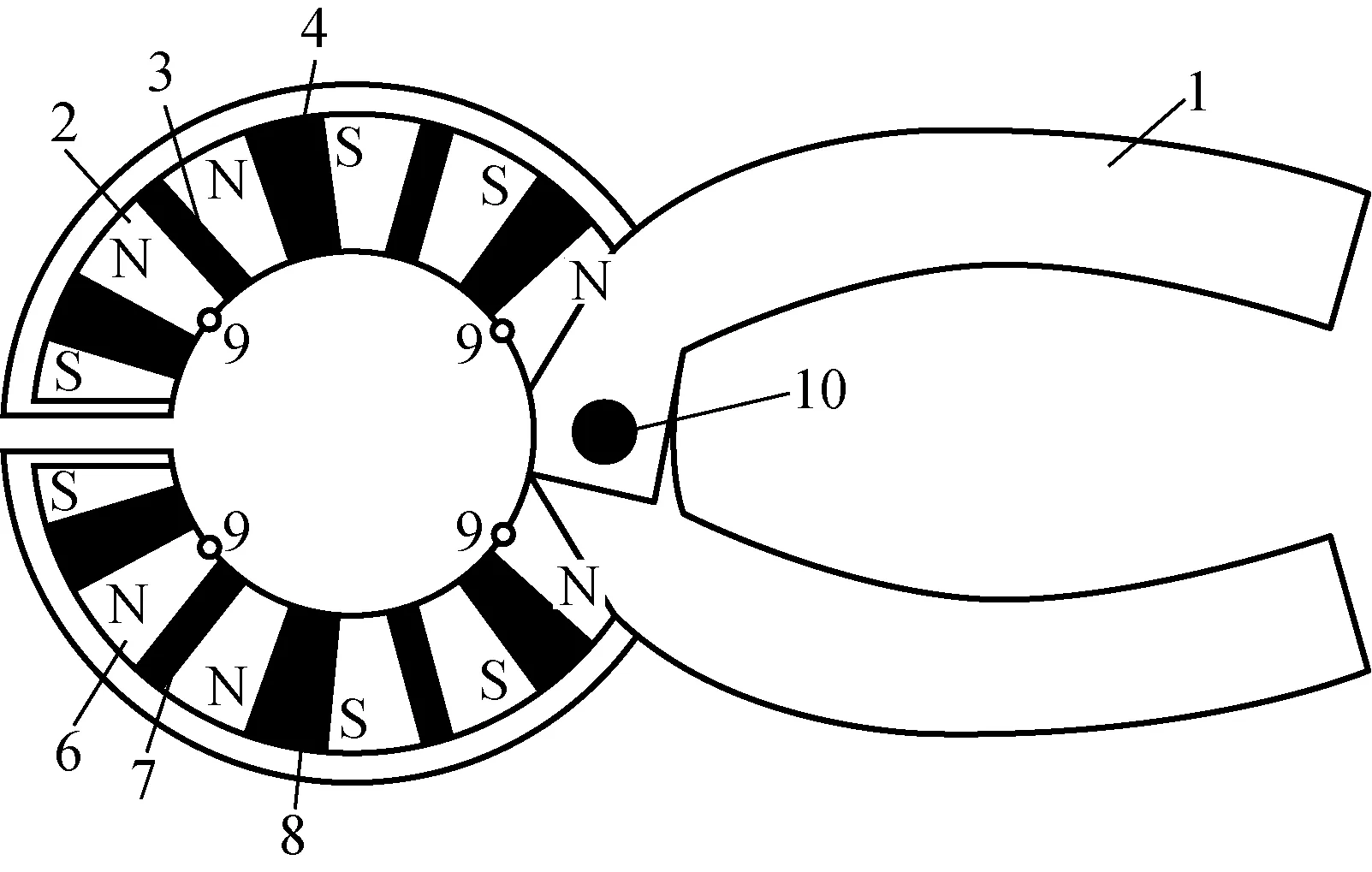
图1 传感器机械结构图Fig.1 Sensor mechanical structure
其中上支架1内侧有铁心槽、挡板、安装孔和手柄;上铁心组件2固定在上支架1的铁心槽中,且上铁心组件2的各分体之间设有夹槽;上磁钢组件4和上霍尔组件3固定在上铁心组件2各分体之间的夹槽中,且为交替式排列;上支架1的挡板处设有轴承孔,轴承9嵌装在挡板的轴承孔中;下支架5和上支架1为对称结构,下铁心组件6、下霍尔组件7和下磁钢组件8,按照对应的顺序,固定在下支架5的内侧。
铆钉10依次穿过上支架1和下支架5的安装孔后固定,并通过弹簧分别与上支架1的手柄处和下支架5的手柄处压紧,使得上支架1和下支架5组装在一起可以实现夹子的功能。
2.2 工作原理
传感器工作时,将传感器与被测转轴夹紧,转轴为铁磁材料,通过上、下支架挡板处的轴承建立被测转轴与测速发电机之间的空气隙。同时将传感器的4片霍尔元件的控制端串联,并通入工作电流。
被测转轴静止时,上、下磁钢各组件形成的磁场分布情况如图2所示,磁力线分别从各磁钢的N极出发,经由对应的铁心组件、空气隙和被测转轴后,回到各磁钢的S极形成闭合回路。根据磁路的欧姆定律可得永磁磁钢产生的磁通量为:
(1)
式中:Fp为永磁磁钢的磁通势;Rmp为永磁磁钢产生的磁通经过磁路的磁阻。
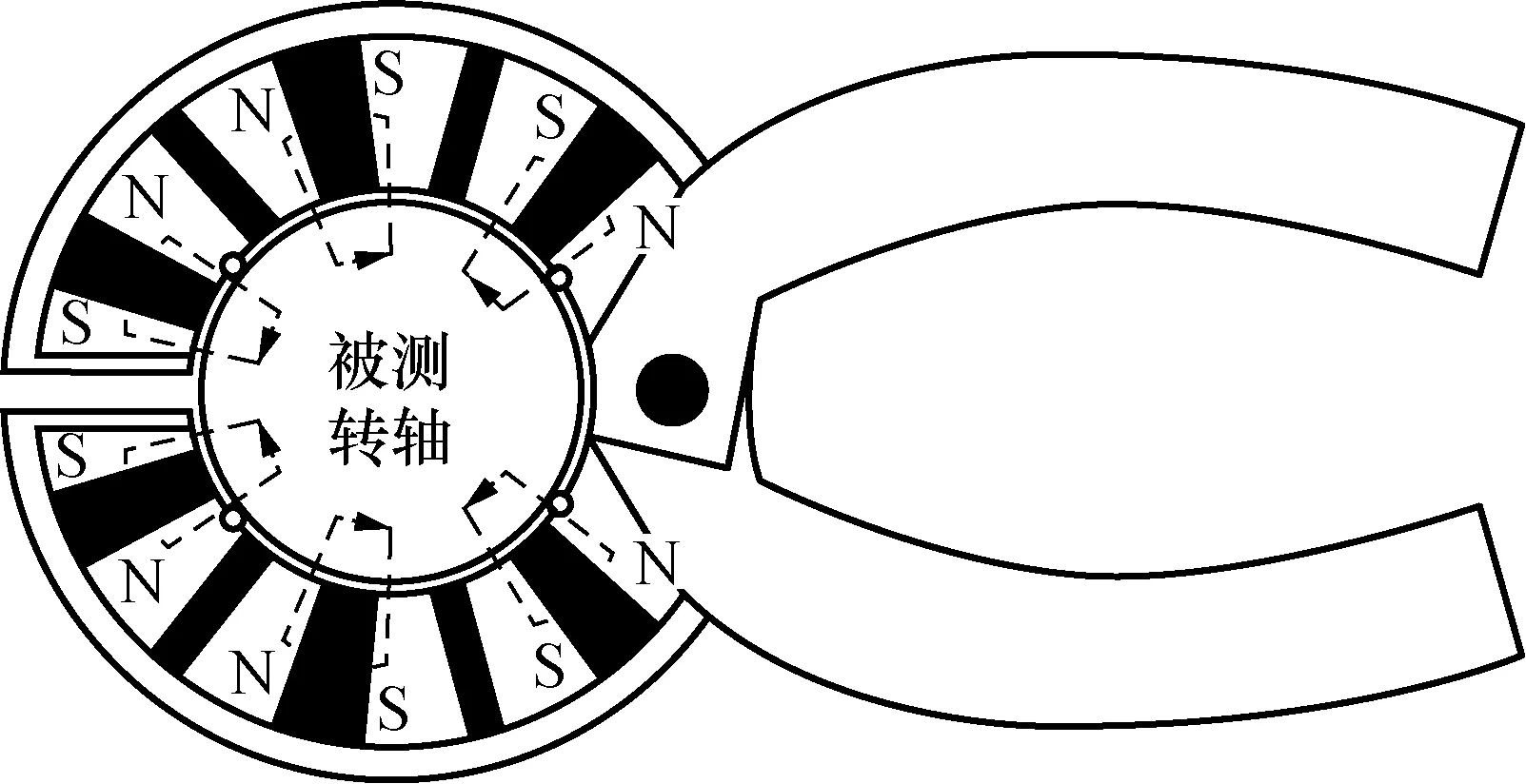
图2 转轴静止时传感器的磁场分布情况Fig.2 Off-line magnetic field distribution of the sensor
此时磁钢组件形成的磁通量Φp与4片霍尔元件均无匝链,因此4片霍尔元件无霍尔电势输出。
被测转轴顺时针转动时,传感器的工作原理如图3所示,被测转轴的表面可以看做是多根导条,顺时针切割上、下磁钢组件形成的磁通量Φp,产生如图3所示的切割电动势。假设被测转轴的转速为n,则根据法拉第电磁感应定律得到感应电动势:
eR=CeΦpn
(2)
式中:Ce为与测速发电机结构相关的常数。感应电动势的方向可以通过右手定则来判断。
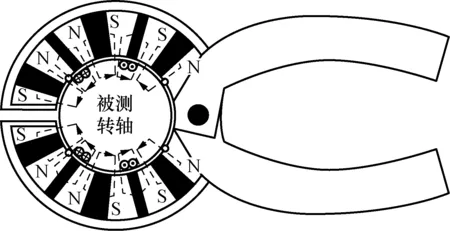
图3 转轴旋转时传感器的工作原理图Fig.3 Working principle of the sensor
根据欧姆定律,被测转轴的表面将产生电流,电流产生的磁场分布情况如图3所示,其方向根据右手螺旋定则判断,且电流为:
(3)
式中:rR为被测转轴表面的等效电阻。同时电流产生磁通量,也可以根据磁路的欧姆定律得到:
(4)
式中:NR为被测转轴表面的等效有效匝数;RmR为被测转轴表面电流产生的磁通经过磁路的磁阻。
此时被测转轴表面电流产生的磁场与4片霍尔元件分别匝链,则霍尔元件分别输出相应的霍尔电势。根据霍尔效应可知,霍尔元件产生的霍尔电势为:
EH=KHIΦR
(5)
式中:KH为与霍尔元件结构和性质相关的常数,I为霍尔元件的控制电流。
联立式(1)~式(5),可得:
(6)
根据式(6)可知,本文设计的便携式角速度传感器,能够直接将被测转轴的转速转换成对应的电信号输出。若霍尔元件的控制电流为直流电,则传感器输出与转速成正比的直流霍尔电势;若霍尔元件的控制电流为交流电,则传感器输出幅值与转速成正比的交流霍尔电势,且频率与霍尔元件控制电流的频率相同。
3 主要特性参数测定
传感器的输出特性描述了被测物理量与输出电量之间的关系,其中灵敏度和线性度为主要特征参数。
3.1 实验系统
为了得到传感器的主要特征参数,采用如图4所示的系统进行测定,系统主要包括三相异步电动机(用于产生角速度激励)、磁粉制动器(机械负载)、转矩转速测量仪(测量系统的角速度值)、三相可调电源、直流稳压电源和角速度传感器。

图4 传感器特性测定实验系统Fig.4 Sensor characteristics measurement system
系统工作时,三相异步电动机、磁粉制动器和转矩转速测量仪(型号:TH4803;转速量程:0~8 000 r/min;精度等级:0.5)同轴相连,角速度传感器与连接轴夹紧。角速度传感器的霍尔元件控制端与直流稳压电源连接。
3.2 实验结果
三相可调电源与异步电动机接线端子连接,通过调节磁粉制动器可以改变异步电动机的负载,继而改变系统的角速度;通过转矩转速测量仪记录系统的转速,再折算成旋转角速度;同时记录此时便携式角速度传感器的输出电压,得到的传感器特性测定实验数据如表1所示。
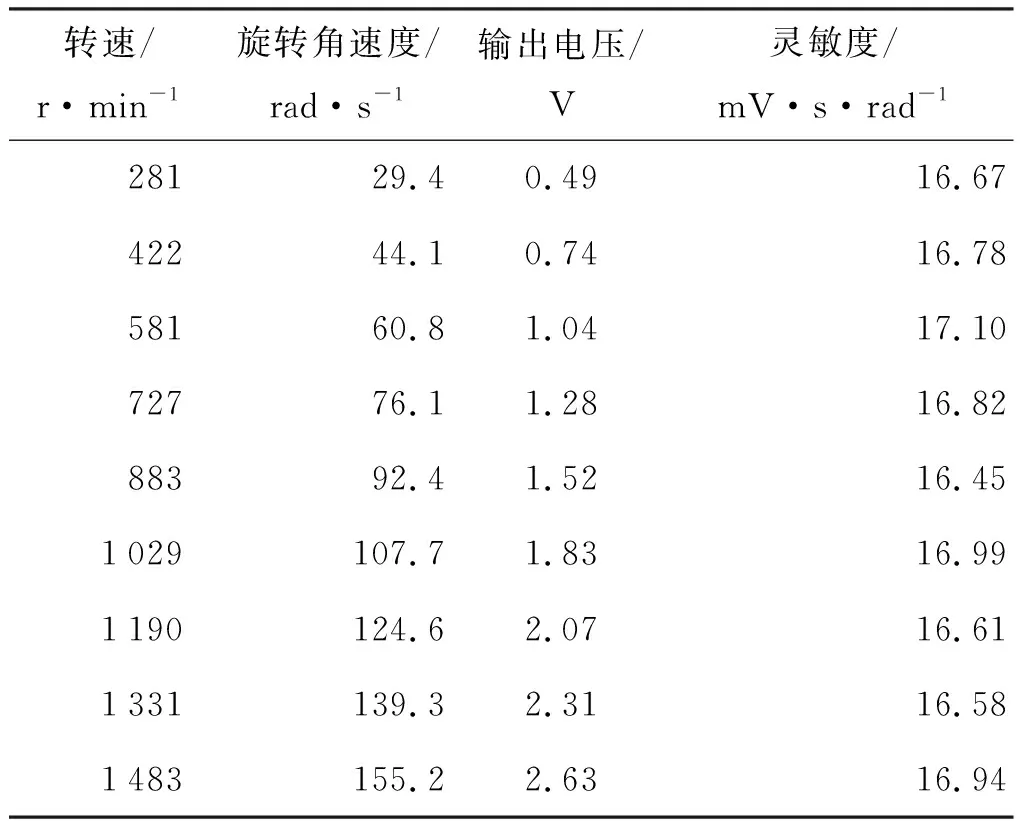
表1 传感器特性测定实验数据Tab.1 Experimental data of sensor characteristics
对表1的实验数据进行线性拟合,得到传感器的灵敏度约为16.8 mV·s/rad;传感器的线性误差定义为:
(7)
式中:ΔRmax是指校准曲线与拟合曲线间的最大偏差;YFS是指传感器的最大输出电压。根据式(7)和实验数据可得本文设计的传感器的线性误差约为1.24%。
3.3 实验结果分析
由实验结果可知,传感器输出的电压值与被测角速度成正比,且根据传感器的工作原理可知,永磁磁钢产生的磁场的强弱、线圈的相关结构常数以及霍尔传感器的灵敏度常数共同决定了角速度传感器的灵敏度。
此外,传感器特性存在线性误差,其原因是在特性推导过程中,设定被测转轴表面的电流与其产生的磁通量成正比,但实际由于磁化过程的非线性,电流产生的磁通与电流值无法严格成正比,最终对传感器输出特性的线性度造成影响。
4 结 论
本文设计了一种便携式角速度传感器,详细阐述了传感器的机械结构和工作机理,对其输出特性进行了测定,得到了相应的指标。本文设计的便携式角速度传感器安装方便,占用空间小,使用时只需将被测转轴夹紧即可;此外,传感器结构简单,无旋转部件,不会对原有旋转系统的转动惯量产生影响,具有较好的动态响应特性,且输出特性的线性度良好。
猜你喜欢
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年1期)2021-06-09
科学技术创新(2021年13期)2021-05-16
防爆电机(2020年4期)2020-12-14
通信电源技术(2019年6期)2019-07-23
山东冶金(2019年2期)2019-05-11
微特电机(2019年2期)2019-02-25
微特电机(2019年1期)2019-02-25
橡塑技术与装备(2018年8期)2018-04-19
中国环境监察(2017年8期)2017-10-23