
FPSO单点集成激光扫描数据与模型比对检验技术
2020-09-10 07:22孙小磊
电焊机 2020年3期
孙小磊



摘要:流花16-2FPSO是海洋石油工程股份有限公司近年来遇到的最具技术挑战的项目之一,单点系泊系统作为FPSO的中枢纽带,也是科技含量最高的部分。利用技术手段在建造阶段严格控制单点系泊和月池的结构精度,是保证单点顺利、成功集成的重要基础。以流花16-2 FPSO为研究对象阐述了通过三维扫描形成点云数据对单点系泊和月池结构的精度控制要点和尺寸检验方法,该方法在传统造船、海工领域的尺寸检验方法基础上进行了创造性的变革。
关键词:FPSO;点云数据;单点集成
中图分类号:TQ022文献标志码:A文章编号:1001-2303(2020)03-0110-05
DOI:10.7512/j.issn.1001-2303.2020.03.20
0 前言
随着我国海洋石油事业的不断发展,浮式生产储卸油装置(FPSO)成为海上油气田开发的主要设施[1]。目前世界上的FPSO主要采用以下三种系泊方式:单点系泊系统、多点系泊系统以及动力定位系统[2]。单点系泊系统由于能抵抗恶劣极端环境条件,且具有风向标效应,成为恶劣海域FPSO定位的唯一选择。单点系泊系统作为整个FPSO的关键部位,具有精度要求高、结构复杂且不规则等特点,对单点系泊系统建造过程的精度控制提出了更高的要求[3]。国内船厂的精度控制主要采用补偿量代替余量的方法[4-5],建造过程中依靠全站仪采集结构物上少数具有代表性的样本点作为分析依据,这种传统做法不足以保证单点系泊系统和月池的建造精度,单点系泊系统结构不规则,样本点采集难度大,部分位置代表性不足,通过三维激光扫描技术可以解决上述问题。本文以流花16-2FPSO项目为例,详细阐述了基于三维激光扫描点云做的单点系泊系统和月池结构的精度控制工艺和检查方法。
1 概念介绍
1.1 FPSO定义
FPSO(Floating Production Storage and Offloading)即浮式生产储油卸油装置,可对原油进行初步加工并储存,被称为“海上石油工厂”。
1.2 点云数据
通过三维扫描仪获取的海量点数据。
1.3 单点系泊系统
锚系泊系统与船体只有一个接触,主要用于定位系泊FPSO和外输原油终端。
1.4 月池
FPSO产品中,由于月池處于大开口区域,采用高强钢,均为强力构件,板材选用较厚,焊接质量要求高,焊接变形大,精度要求高。
2 单点系统和月池主要组成部分
单点系统主要由塔架、管汇平台结构、下部转塔结构组成(见图1)。船体月池(见图2)结构主要包含内底组立、圆筒组立、T型材组立、水平绗组立等。
3 单点与月池建造的精度管理
单点系泊从结构形式看下塔体和中塔体建造难度较大,在此主要以中塔体、下塔体及月池为例介绍精度管理要求。
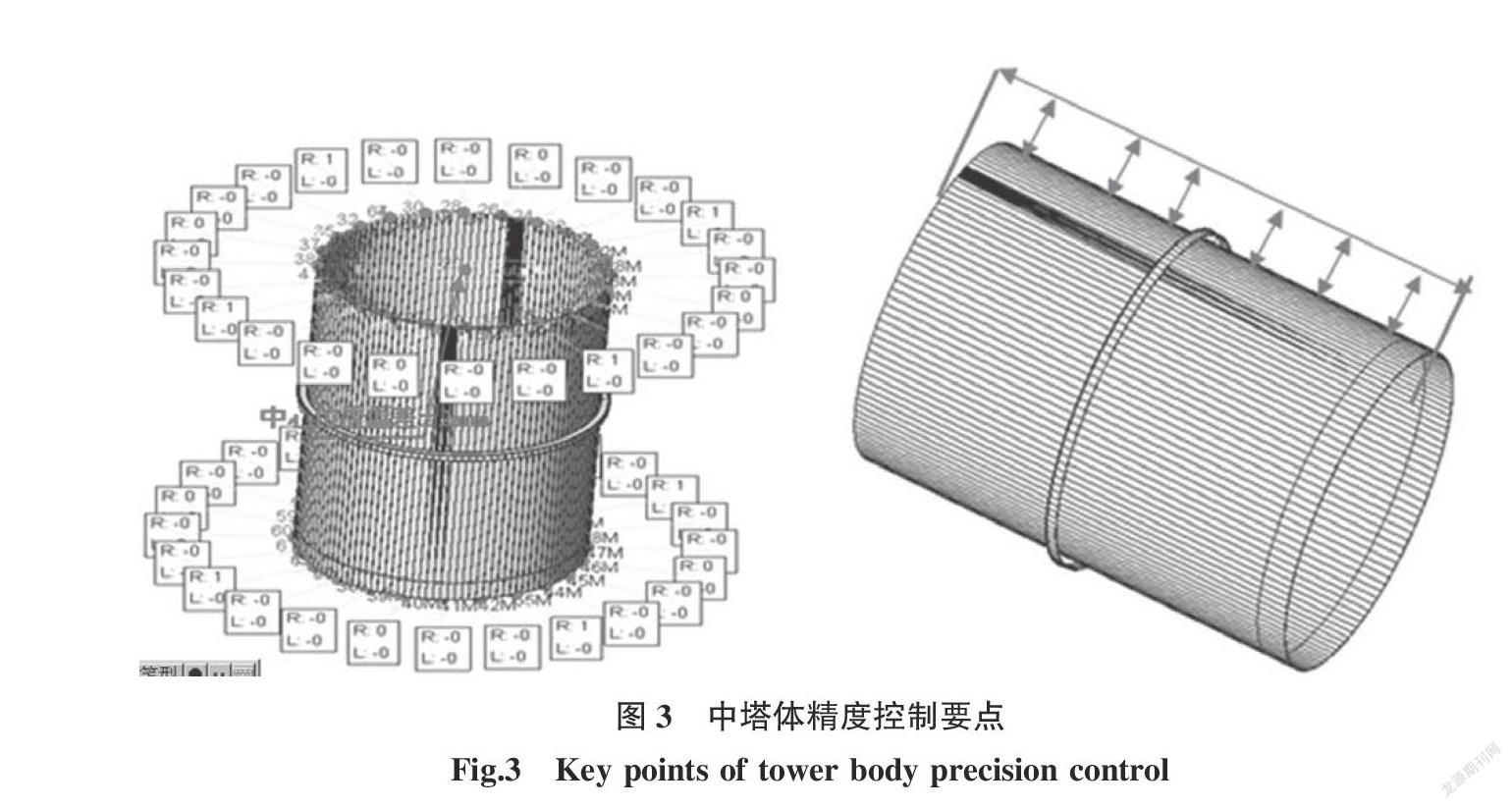
3.1 中塔体结构及控制要点介绍
中塔体结构形式为圆柱体,最大直径7 760 mm,高度为15 900 mm。中塔体顶部和底部端面圆度半径控制在±3 mm以内,同心度控制在±2 mm以内,端面垂直度控制在±5 mm。中心点圆心的理论数据和实测数据偏差按照±1 mm管理,筒体直线度按照±4 mm管理。中塔体精度控制要点如图3所示。
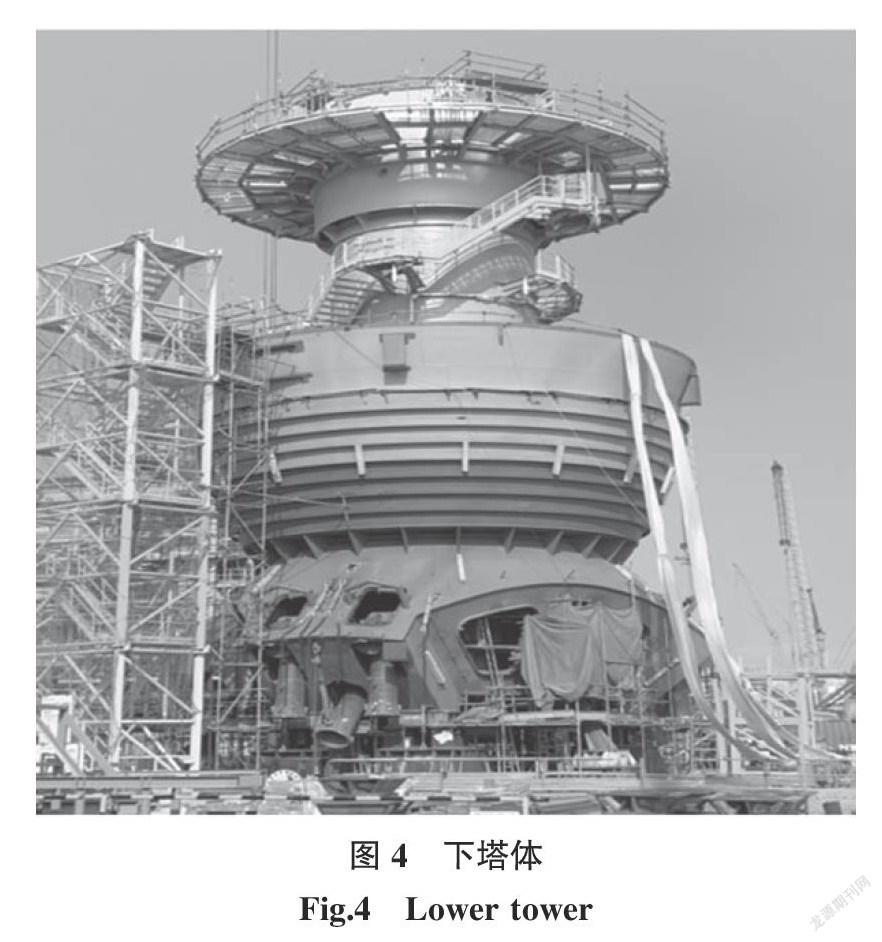
3.2 下塔体结构及控制要点介绍
下塔体为不规则形状,最大半径16 310 mm,整体高度25 200 mm(见图4)。其精控管理主要为同心度的管理,同心度精度必须控制在±2 mm以内。由于形状不规则,采用常规全站仪进行测量时很难找到分析基准,检测难度增加,必须采用点云数据的拼接技术进行检测。
3.3 月池结构及控制要点介绍
月池舱为圆柱形,直径17 m,高27m,周长精度需控制在10 mm以内,垂直度控制在5 mm以内,该要求是通用船型的10倍以上。月池由多个分段拼装完成(见图5),在单个分段预制时半径需控制在±2 mm以内才能达到搭载阶段圆度±4 mm以及垂直度小于3 mm的要求,以及最终成品的精度要求。
4 三维激光扫描技术在单点系泊测量上的应用研究
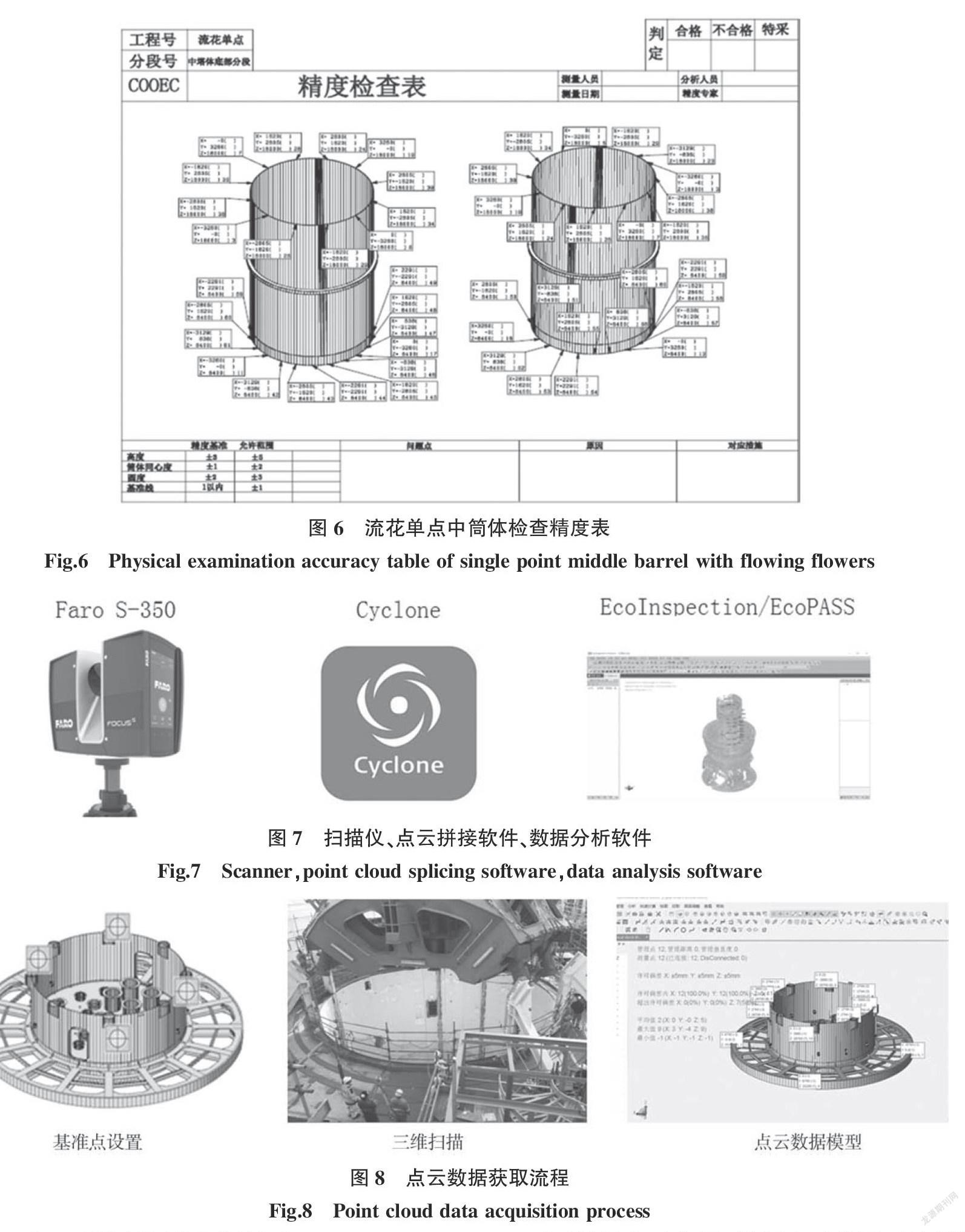
4.1 传统测量技术难点
从精度表(见图6)可以看出,测量物体为圆筒体时检测点较多,用普通的全站仪测量无法得到全面的数据,同时,若基准选取存在失误,测取数据将失去意义。本次单点系泊的制作中塔体和下塔体采用全站仪和三维扫描仪结合的方法,将测量数值通过点云拼接软件进行拼接模拟来获取最终数据。
4.2 应用的硬件及软件
流花FPSO单点系泊的中塔体、下塔体、月池分段制作完成后,通过三维扫描仪和点云拼接软件(见图7),对分段进行检查得出需要的检查数据,对超出公差范围的部分提前进行调整修正以达到精度要求。
4.3 作业流程
利用全站仪和三维扫描仪相结合的测量方法对相关结构物进行精度控制,将实测数据通过点云数据软件进行拼接模拟,获取最终数据(见图8)。
首先,在下塔体、中塔体和月池设定统一的分析基准点,也是三维扫描完成后点云数据拼接模拟基准。其次,通过Faro S-350三维扫描仪对下塔体进行全面扫描,获取实测点云数据模型。扫描过程重点注意不要遗漏前期设定的分析基准点,作为后续数据拼接的基准点。注意将扫描的时间放在温差变化较小的夜间进行。最终,根据获取的点云数据模型,利用点云数据分析软件对实测点云数据模型和理论数据模型进行数据对比,得出各个位置的偏差值,并将偏差值调整到精度控制范围以内。
4.4 基于点云数据模拟分析流程
点云数据的分析过程是整个单点系泊系统基于点云数据应用的最重要一环,必须保证整个分析过程的基准是统一的,从而保证数据的一致性。点云数据分析流程如图9所示。
(1)选定分析基准。利用点云软件移动功能可调整高度,让实测点云模型与设计理论模型保持基准点一致,可选择避开无数据区域或无用数据区域。
(2)设置点云范围。设置点云范围,利用所选范围内的点云数据以及软件3点生成圆的原理生成正圆,可以调整高度及深度,生成所需位置的圆度。
(3)生成正圆。在所选位置生成正圆,同时生成中心点。若扫描过程存在其他物体的干涉,那么扫描到的无效数据会导致生成的圆存在一定的变形。
(4)点云数据结果分析。对中塔体、下塔体以及月池的最终数据进行分析,选取中心线为绝对基准线,R代表圆柱体半径的偏差值,L代表圆柱体的高度偏差值,Z值代表云数据中的该点的实测高度值。由图10可以很详细地知道测量物体每个点的坐标数据是否能够达到精度要求。
5 经济效益
(1)无形效益。激光扫描数据与模型比对检验技术是国内首次应用于FPSO单点内塔系泊的检测方法,对后续建造的类似产品提供了技术支持,对于复杂结构物可以采用此技术进行检查。
(2)有形效益。通过点云数据测量达到逐点精密测量、通过专业工序反复调整变形量,在建造阶段有效控制单点系泊系统与月池尺寸,能够有效避免集成过程发生碰撞进而对结构重新调整、修改,为后续单点与船体的集成打下坚实的基础,大大缩短集成工期。
6 展望
在流花FPSO中的内转塔单点系泊系统及船体月池建造过程中,利用点云数据的检查方法贯穿始终,也是国内首次将这一技术应用在FPSO的建造中。对船厂而言,分段的检测方法也进入高科技模式,传统的制作、装配、测量监控模式已经无法适应当今的精度需求,新技术的引入和应用就需要不断的探索和研究。
参考文献:
[1] Yong Luo,Hongwei Wang. Permanent versus disconnectable FPSOs[J]. Journal of Marine Science and Application,2009,8(5):93-98.
[2] 張益公. 深水 FPSO 系泊系统设计分析[D]. 黑龙江:哈尔滨工程大学,2015.
[3] 薛士辉,李怀亮,胡雪峰. 内转塔式单点系泊系统及安装工艺介绍[J]. 中国造船,2008,49(A02):243-250.
[4] 王孝海. 船体分段建造的精度控制研究[D]. 黑龙江:哈尔滨工程大学,2011.
[5] 楚立民,苏忠义,黄伟. FPSO内转塔式单点系泊钢结构建造工艺[J]. 船海工程,2014,43(A01):66-71.
