站驾前移式电动叉车制动系统控制研究
2020-09-10 07:22盛华健陈远龙张克军林华
内燃机与配件 2020年11期
盛华健 陈远龙 张克军 林华





摘要:针对2.5吨站驾前移式电动叉车的制动系统进行研究,提出在左、右承载轮上增加电磁制动系统的制动方式,并分别给出行车制动系统和驻车系统控制策略,随后在试验样机中进行搭载测试。试验结果表明,采用此控制策略能有效缩短叉车的制动距离,且司机的主观感受稳定性有所提升。
关键词:电动叉车;站驾前移式;制动系统;控制策略
0 引言
站驾前移式电动叉车的制动系统通常都是依靠驻车制动器限制驱动齿轮箱输入轴转动达到抱死驱动轮的目的,在高位作业时,由于驱动轮和叉车底盘之间的齿轮箱齿轮间存在啮合间隙,导致叉车底盘出现前后晃动的现象;其次由于站驾前移式电动叉车右侧为驾驶室空间,单个驱动轮只能偏置安装在左侧位置,当触发行车制动请求时,驱动轮立即处于制动状态,其余承载轮均无制动,容易出现制动距离较长的危险情况,给叉车司机带来不好的操作体验。
宋世欣[1]等提出适用于电动汽车的机电复合制动控制策略,仿真后得到接近于理想的制动力分配曲线,分析了系统的制动效果。宫唤春[2]基于MATLAB/Simulink软件优化了汽车再生制动控制策略,通过采用不同的智能控制方式来满足了制动需求。
本文针对站驾前移式电动叉车的制动距离长、高位作业稳定性差的问题,提出在承载轮上增加电磁制动系统,并对其控制策略进行研究,并在试验样机上完成制动距离测试,同时邀请叉车司机对高位作业稳定性的主观感受进行评分。
1 站驾前移式电动叉车基本结构
1.1 整车结构
站驾前移式电动叉车具有两条前伸的支腿且位置较高,作业时门架支座带动起重系统沿着支腿内侧的轨道前后移动,等待叉取货物后将其提升至稍高于支腿的的高度再向后移动,极大地節省作业空间[3,4]。根据整车结构特点对制动系统中相关部件位置进行布局,如图1所示。
1.2 制动系统结构
针对站驾前移式电动叉车的制动系统相关问题,提出在现有电机再生制动基础上增加前轮电磁制动器后形成的一种新型制动方式,并分别给出行车制动系统和驻车系统控制策略。制动系统结构设计如图2所示,左承载轮上的编码器检测车轮速度,当给出制动信号后,控制器控制电机和电磁制动器转为制动模式,实现整车制动。
2 制动系统控制策略
2.1 行车制动系统控制策略
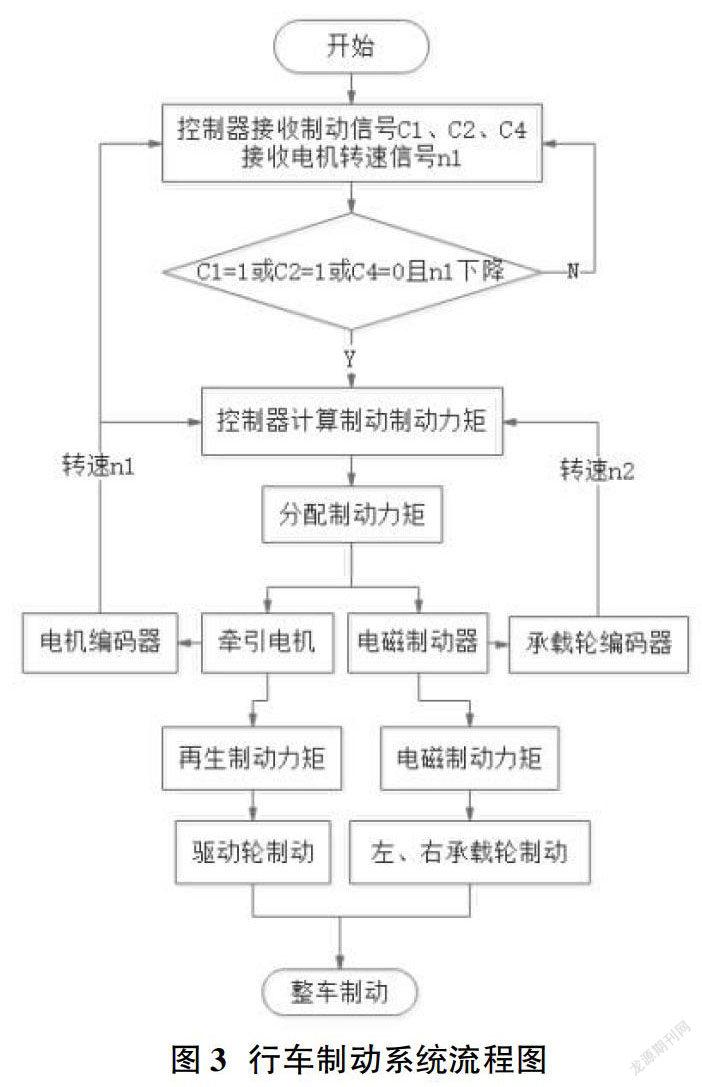
提出承载轮与牵引电机共同制动的控制思路,用于解决叉车制动距离长的问题[5],行车制动系统流程图如图3。
叉车在行驶过程中可以通过释放拇指开关或者释放制动踏板来触发制动信号,控制器14检测到前进开关7输出信号C2=1或后退开关8输出信号C1=1或制动开关输出信号C4=0,且电位器6输出的电压信号C3变化趋于2.5V,表明发出行车制动请求;控制器14控制牵引电机17处于再生制动状态,电机的制动力矩随着转速减小而增大,同时控制器14向承载轮电磁制动器1和21发出制动信号,根据电机转速施加不同的制动力矩,与牵引电机协同作业实现整车的共同制动,有效缩短制动距离。
2.2 驻车制动系统控制策略
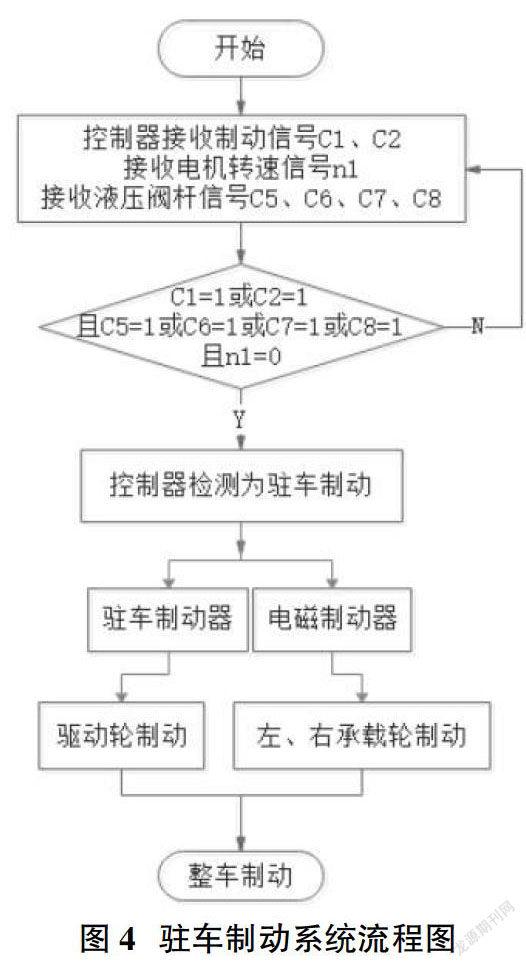
此控制策略旨在提高站驾式前移电动叉车高位作业稳定性[6],结合图4对驻车制动系统控制策略思想进行叙述。
控制器14通过电机编码器20检测到牵引电机16的转速为0,且油泵控制器13检测到液压阀杆开关输出信号C5、C6、C7和C8这四个信号不全为0,表明起重系统需要工作;当满足以上两个条件成立后,控制器14切除驻车制动器16电源,抱死驱动轮19,同时控制器14给右承载轮制动器1和左承载轮制动器21通入恒定电流,实现承载轮制动,保证叉车底盘制动稳定可靠。
3 制动控制试验
3.1 制动距离测试方案
在站驾前移式电动叉车试验样机上连接VBOX、电功率仪、工业显示屏等设备,设备连接如图5所示。分别测试在搭载行车制动系统控制策略空载全速、不搭载行车制动系统控制策略空载全速、搭载行车制动系统控制策略满载全速和不搭载行车制动系统控制策略满载全速共四种不同工况下的制动距离试验数据并对其分析。
3.2 行车制动测试
样机的空载最高设计速度为11.5km/h、满载最高设计速度为10km/h、额定载荷为2500kg,在上节描述的四种不同工况下进行制动距离测试,处理后得到制动距离数据。
根据试验数据可知:在空载或满载(搭载控制策略)工况下比空载或满载(不搭载控制策略)工况下的制动距离分别减少约1.3m、1.6m,因此行车制动控制策略能够有效缩短制动距离。
3.3 驻车制动测试
邀请3名驾驶经验丰富的叉车司机对试验样机的高位作业稳定性进行主观评价,根据表2的评价标准进行打分。
根据上述试验进行评分,数据如表3。
搭载驻车制动系统控制策略的高位作业稳定性平均分为8.7,叉车司机一致认为对此车型的高位作业稳定性提升明显。
4 结论
通过以上分析研究得到如下结论:
①结合站驾前移式电动叉车的制动距离长、高位作业稳定性差的问题,提出在承载轮上增加电磁制动器的制动方式,针对此种制动方式分别给出行车制动系统和驻车制动系统控制策略。
②针对行车制动系统控制策略进行研究,对制动距离进行测试,结果表明此控制策略有效缩短了叉车的制动距离。
③针对驻车制动系统控制策略进行分析,给出高位作业稳定性主观评价标准,结果表明整车高位作业稳定性提升明显。
参考文献:
[1]宋世欣,王庆年,王达.电动轮汽车再生制动系统控制策略[J].吉林大学学报(工学版),2014.
[2]宫唤春.基于MATLAB/Simulink的电动汽车再生制动仿真[J].汽车工程师,2019.
[3]黄帅,唐希雯,谢海,何龙,夏光.基于ADAMS与Simulink的平衡重式叉车侧倾分级控制联合仿真[J].合肥工业大学学报(自然科学版),2018.
[4]包剑南.站驾前移式电动叉车设计与研究[D].浙江工业大学,2016.
[5]张克军,白迎春,高新颖,盛华健.站驾式前移电动叉车行车制动系统及控制方法:中国,109910848A[P].2019-06-21.
[6]张克军,白迎春,高新颖,盛华健.站驾式前移电动叉车驻车制动系统及控制方法:中国,110002369A[P].2019-07-12.
猜你喜欢
交通科技与管理(2022年9期)2022-05-24
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
电子乐园·上旬刊(2021年7期)2021-07-19
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
农机使用与维修(2016年12期)2017-01-17
未来英才(2016年14期)2017-01-12
科技传播(2016年19期)2016-12-27
科技创新与应用(2016年34期)2016-12-23