一种基于STM32系统的FMCW雷达系统设计
2020-09-22 08:43任建丁旭郭国发
科技智囊 2020年3期
关键词:STM32单片机
任建 丁旭 郭国发

摘 要:连续波体制雷达的发射功率可在一段时间内实现功率平均分配,发射峰值功率小、环境适应性强,因此易于结构优化、电路简单。文章在STM32架构上设计了一款24GHz 毫米波调频连续波(frequency modulation continuous wave,FMCW)雷达系统。经LabView平台仿真和实物验证,最终可生成频率为100Hz,峰值为2.56V的调频连续波。该系统由于易实现、效率高,可在自适应巡航和交通监管等方向开展应用。
关键词:调频连续波;差频信号;测距雷达;STM32单片机;
Abstract:The transmission power of the continuous wave radar can realize the average power distribution within a period of time,the transmission peak power is small,and the environmental adaptability is strong,so it is easy to optimize the structure and the circuit is simple.This paper designs a 24GHz millimeter wave frequency modulation continuous wave (FMCW) radar system on the STM32 architecture.Through LabView platform simulation and physical verification,it can finally generate a frequency-modulated continuous wave with a frequency of 100Hz and a peak-to-peak value of 2.56V. Due to its easy implementation and high efficiency,this system can be applied in adaptive cruise and traffic supervision.
Key words: FM continuous wave; Difference frequency signal; Ranging radar; STM32 microcontroller;
一、引言
FMCW雷达是基于连续波雷达技术而来的,与脉冲体制雷达相比,它具有高带宽、工作电压低、大时带积等优点[1-3]。随着集成电路工艺的不断提高,硬件成本降低,高性能的毫米波雷达研制成为可能[4-6]。
2017年南京理工大学的李健以TMS320C6748核心板来搭建雷达平台[7]。2018年11月1日,国内首辆配备毫米波雷达的自动驾驶出租车正式问世。由于高频器件较贵,鲜有电子厂商在这个领域有重大突破。国内雷达传感器开发难度大[8]。笔者所设计的基于FMCW雷达系统是一款简单高精度的雷达系统,可以为大规模生产提供帮助。
二、FMCW雷达测距基本原理
连續波雷达发射信号有非调制、多频和调频三种。调频连续波雷达测距性能较好。调频连续波雷达的主流工作频段是24GHz、77GHz,目前24GHz调频连续波雷达是大多数厂家的主流选择。
发射信号在传播过程中遇到障碍物发生散射,散射信号向所有方向传播,部分信号被接收天线接收。发射到接收有时间上的延时,回波信号相对于本振信号有频率差,分析频率值可得目标物体的距离信息。
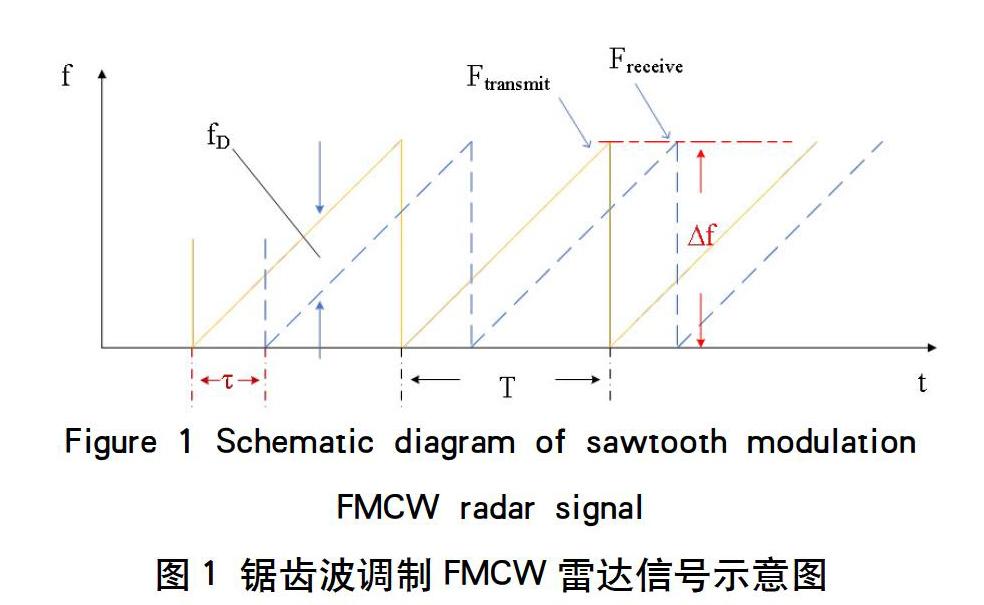
如图1所示,黄色实线为发射信号(Ftransmit),蓝色虚线为接收信号(Freceive),某时刻t0的接收信号频率低于发射信号频率,生成具有基本固定值的差频信号fD。雷达信号由锯齿波调制,发射信号与回波信号几乎相同,延迟时间τ,c0是光速,Δf为调频宽度。目标距离R的值与τ之间的关系如式(1)所示。
二、雷达系统硬件实现
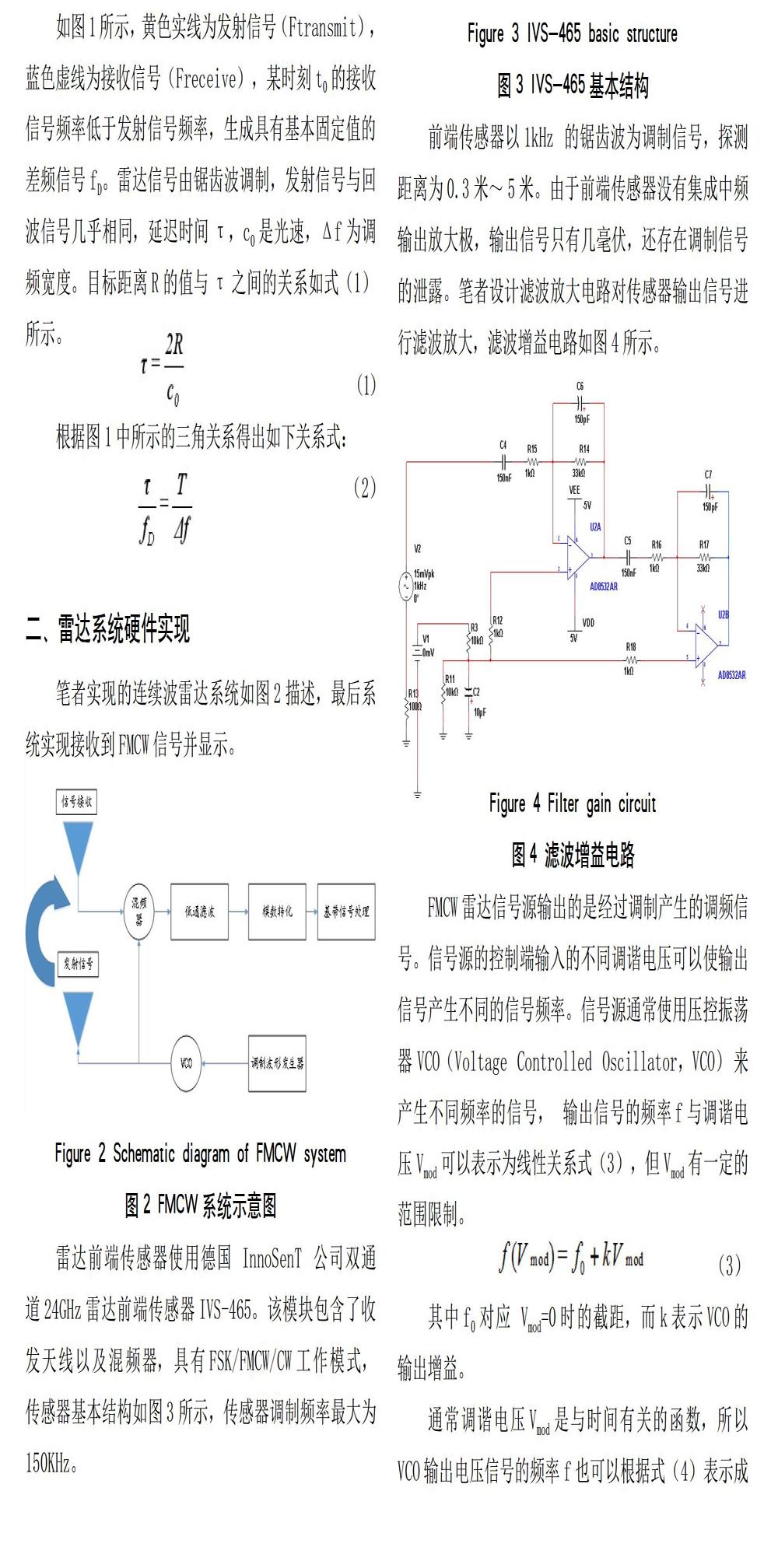
笔者实现的连续波雷达系统如图2描述,最后系统实现接收到FMCW信号并显示。
雷达前端传感器使用德国 InnoSenT 公司双通道24GHz雷达前端传感器IVS-465。该模块包含了收发天线以及混频器,具有FSK/FMCW/CW工作模式,传感器基本结构如图3所示,传感器调制频率最大为150KHz。
前端传感器以1kHz 的锯齿波为调制信号,探测距离为0.3米~5米。由于前端传感器没有集成中频输出放大极,输出信号只有几毫伏,还存在调制信号的泄露。笔者设计滤波放大电路对传感器输出信号进行滤波放大,滤波增益电路如图4所示。
FMCW雷达信号源输出的是经过调制产生的调频信号。信号源的控制端输入的不同调谐电压可以使输出信号产生不同的信号频率。信号源通常使用压控振荡器VCO(Voltage Controlled Oscillator,VCO)来产生不同频率的信号, 输出信号的频率f与调谐电压Vmod可以表示为线性关系式(3),但Vmod有一定的范围限制。
其中f0对应 Vmod=0时的截距,而k表示VCO的输出增益。
通常调谐电压Vmod是与时间有关的函数,所以VCO输出电压信号的频率f也可以根据式(4)表示成与时间相关的函数 f(t):
输出信号的频率f与输入电压在部分区间内似线性关系,VCO输出电压信号可以表示为式(5):
At为VCO输出的发射信号的幅值;ψ(t) 为发射信号的相位。
设计调制信号由STM32F103RCT6单片机的DAC产生,调制信号的电压值为0.5V~3V时VCO的线性度较好,输出电压范围在0V到3.3V之间。配合直接存储器访问使用来减少CPU资源占用,更加高效。
A/D采集使用MP4623采集卡,上位机使用LabView开发,其程序图形化如图5所示
调用VI启动校准采集卡,获取缓冲区数据长度并值返回到A/D数据读取函数,将读取到的数组类型的数据转换进行显示,并对数据进行傅立叶变换。
整套FMCW测距雷达系统实物如图6所示。
雷达系统各部分为:
1.STM32单片机;2.MP4623数据采集卡;3.IVS-465传感器;4.差频信号滤波增益电路;5.±5V电源转换模块。
三、实验结果
经过硬件调试,得到如下结果。
使用60dB增益带通滤波放大电路对传感器输出信号进行滤波放大,截止频率约为32.17KHz,防止信号泄露的滤波结果如图7所示。
使用DAC输出锯齿波,使输入值从500到3000进行递增,此过程在while循环中进行。设定好合适参数值即可得到较稳定、符合要求的波形。由采集卡采集,LabView上位机显示,三角波输出如图8所示。
通过波形控件将读取到的数组类型的数据转换为波形数据,并连接到波形显示控件上进行显示,至此可观察到采集的波形,上位机运行效果图如图9。
由图9可见,该设计稳定实现了24G调频连续波的雷达,完成了波形设计、发射和接收,为以后的测量、跟踪等应用提供前端基础。
四、结束语
综上,对FMCW雷达系统使用锯齿波调制的工作原理进行了分析,并设计了整套系统的各部分组件,主要包括调制信号信号源、差频信号处理电路、基于LabView的采集卡上位机程序,实现了基本的测距功能,性能良好。2020年开年,新冠疫情全球肆虐,在中国本土管控良好的同时,对外来输入病例的防范成为抗疫的重中之重。在这样的大背景下,海关的非接触测量显得尤为关键。24GHz调频连续波作为测距的主要雷达机制,终于可以大展身手。因此,该设计电路对于便携式微波设备开发具有重要的参考意义。
参考文献
[1]陶明亮. 毫米波FMCW雷达信号处理关键技术研究 [D].厦门:厦门大学,2016.
[2]武守俊. 毫米波汽车防撞雷达设计及其信号处理算法研究 [D].成都:电子科技大學,2007.
[3]张鹏,熊杰.基于DSP的FMCW雷达泄漏对消系统分析[J].火控雷达技术,2015(01):43-48.
[4]曹和.8mm连续波多普勒近程探测系统的设计与实现 [D].南京:南京理工大学,2010.
[5]王明刚.24GHz调频连续波雷达信号处理技术应用[J].电子技术与软件工程,2018(15):71-72.
[6]艾俊轶. 毫米波高精度测距雷达信号处理及实现[D].成都:电子科技大学,2006.
[7]李健. 24GHz调频连续波雷达信号处理技术研究[D].南京:南京理工大学,2017.
[8]汤家俊. 24GHz调频连续波雷达前端的研究和设计[D].合肥:安徽大学,2017.
[9]丁海凤. 汽车主动防撞预警系统雷达信号处理研究[D].长春:吉林大学,2013.
[10] Park J D ,Kim W J . An efficient method for decreasing the problems of transmitter leakages on low‐cost homodyne FMCW radar with a signal‐antenna configuration[J]. Microwave & Optical Technology Letters,2005,46(5):512-515.
[11] 王硕,殷树娟,李翔宇.一种低成本FMCW雷达测距系统中频电路设计[J].微处理机,2019(02):52-56.
[12] 任建,许会,李邦宇.穿墙雷达图像CS编码算法设计[J].沈阳工业大学学报,2016(01):80-85.
猜你喜欢
科技资讯(2017年3期)2017-03-25
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年17期)2016-07-23
中国高新技术企业(2015年3期)2015-03-26
现代电子技术(2014年21期)2014-11-07