
基于自适应滑模的车辆稳定性控制策略
2020-09-23 09:05郭海文罗玉涛
机械设计与制造工程 2020年9期
郭海文,罗玉涛
(华南理工大学机械与汽车工程学院,广东 广州 510640)
随着汽车电动化和自动化的发展,对车辆稳定性控制的要求越来越高,目前的研究主要围绕车辆质心侧偏角和横摆角速度的控制展开[1-3]。
Kayacan 等[4]通过对车辆的质心侧偏角进行估计,再结合最优控制理论来实现车辆稳定性的控制。Shibahata和Beal等[5-6]通过制定合理的车辆制动控制策略,验证了差分制动策略改善车辆稳定性的可行性。Xu和Tahami等[7-8]分别基于PID反馈控制和模糊控制对车辆的横摆力矩进行控制,以保证车辆的稳定性。
上述控制方法虽然可以保证车辆稳定性控制的精度要求,但由于车辆参数具有不确定性,导致在某些工况下可能使车辆稳定性变差。陈亚伟等[9]提出了基于模型预测的车辆横向稳定性控制策略,通过实时预测车辆横摆角速度,来跟踪车辆的理想横摆角速度。
为了提高在车辆参数具有不确定性时车辆稳定性控制的性能,本文提出了一种基于自适应滑模控制的车辆稳定性控制策略。其中,通过自适应律实时估计具有不确定性的模型参数,再结合传统滑模控制理论实现车辆横摆角速度对稳定转向状态下理想横摆角速度的有效跟踪,以实现车辆的稳定性控制。
1 车辆稳定性模型的建立
1.1 车辆动力学模型的建立
本文主要研究车辆转向时横向稳定性控制,为了便于后续的稳定性控制分析,基于如下假设建立二自由度非线性的车辆单轨模型,如图1所示。假设:1)忽略转向系中摩擦和阻尼的影响,将左右车轮转角由阿克曼几何关系换算成前轴集中转角,以前轴转角作为输入;2)假设车辆动坐标系上的原点固定于车辆的质心位置;3)忽略悬架的影响,即车厢平行于地面运动,沿z轴的位移和绕x,y轴的侧倾角与俯仰角均忽略不计,只作沿y轴的平移和绕z轴的摆动;4)假设车辆在x轴上的车速不变;5)4个轮胎的机械性能相同;6)忽略空气阻力和轮胎迟滞阻力的影响。
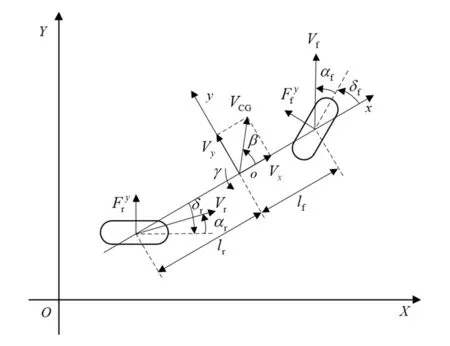
图1 二自由度车辆的单轨模型
沿y轴和绕z轴构造平衡方程,可以得到如下的车辆动力学方程:
(1)
(2)
式中:M为车辆的质量;Iz为车辆绕z轴的转动惯量。
车轮的侧偏力和侧偏角的关系如下:
(3)
式中:Cf,Cr为前后车轮的侧偏刚度;αf,αr为前后车轮的侧偏角。αf,αr可以由式(4)估计得到。
(4)
故基于小角度的假设和近似估计,车辆动力学模型可以写为:
(5)
(6)

(7)
对于该车辆模型而言,由于行驶环境的影响,前后车轮的侧偏刚度等车辆参数存在一定的不确定性,并存在一个有界条件,即amin≤a≤amax,bmin≤b≤bmax,cmin≤c≤cmax,其中amin,amax,bmin,bmax,cmin,cmax分别为车辆参数变化的上下限。式(7)可表示为:
(8)
式中:d1,d2,d3分别表示包含了不确定参数的公式系数。
由上述的有界条件可知:
(9)

1.2 理想车辆稳定性模型的建立
本文主要围绕车辆转向时横摆角速度的控制来对车辆稳定性展开研究,即在车辆转向时,使车辆的实际横摆角速度能够跟随稳定转向状态下的理想横摆角速度,尽可能达到理想的转向状态,故需要建立理想车辆稳定性模型来作为参照。
(10)
式中:δref为驾驶员或上层控制器输入的期望转角;γD为符合稳定转向状态定义的理想横摆角速度。
在仿真建模和实际应用时,一般对理想的横摆角速度信号进行滤波处理,滤波器可以表示为:
(11)
式中:γω为滤波器的系数;ωγ为理想模型横摆角速度的滤波器截止频率;S为复数频率。
2 基于自适应滑模的车辆稳定性控制器设计

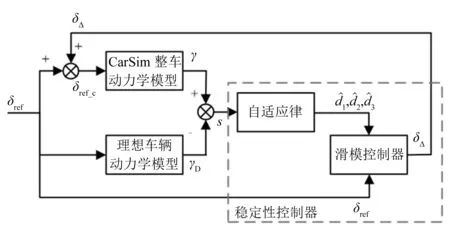
图2 基于自适应滑模控制的车辆稳定性控制框图
来设计稳定性控制器,由控制器计算出补偿转角对预先给定的车轮期望转角进行修正,以保证车辆横摆角速度对1.2节中建立的稳定转向横摆角速度进行实时跟踪,从而控制车辆的稳定性。
图中:δΔ为稳定性控制器输出的补偿转角;δref_c为修正后的期望转角且δref_c=δref+δΔ。定义滑模函数s为车辆横摆角速度实际值与理想值之间的误差。
s=γ-γD
(12)
(13)
由式(12)和(13)可知:
(14)
故稳定性控制器的控制律为:
(15)
将式(15)代入式(14)可得:
(16)
定义Lyapunov稳定性方程为:
(17)
式中:L为控制器的稳定性变量;η1,η2,η3为稳定性方程的系数。
则:
(18)
由式(18)可知,对模型参数d1,d2,d3进行实时估计的自适应律为:
(19)
滑模控制的抖振主要与切换项增益的取值有关,为了削弱切换项引起的抖振现象,采用修正函数sat(s)代替sgn(s),故控制律为:
(20)
(21)
式中:Δ为边界层。修正函数sat(s)的作用是,在定义的边界层内,通过反馈控制降低在较大切换增益时滑模切换产生的抖振;在定义的边界层外,采用切换控制,保证系统状态快速地趋近于滑模面。
3 联合仿真与结果分析
本节基于MATLAB/Simulink和CarSim平台对车辆稳定性控制策略进行仿真验证,分别对基于PID反馈控制和自适应滑模控制的车辆稳定性控制器进行仿真对比,以验证自适应滑模稳定性控制器的可行性。
3.1 基于PID的车辆稳定性控制仿真
本文设计了一个基于PID反馈控制的车辆稳定性控制器作为对照组,其输入信号为车辆横摆角速度跟踪的误差值,比例、积分和微分系数为kP=1.2,kI=0.3,kD=0.8,以实现横摆角速度的稳定跟踪。
联合仿真中所用的CarSim整车模型的理想参数见表1,其中采用CarSim中的非线性轮胎模型来模拟侧偏刚度对控制器的不确定性。
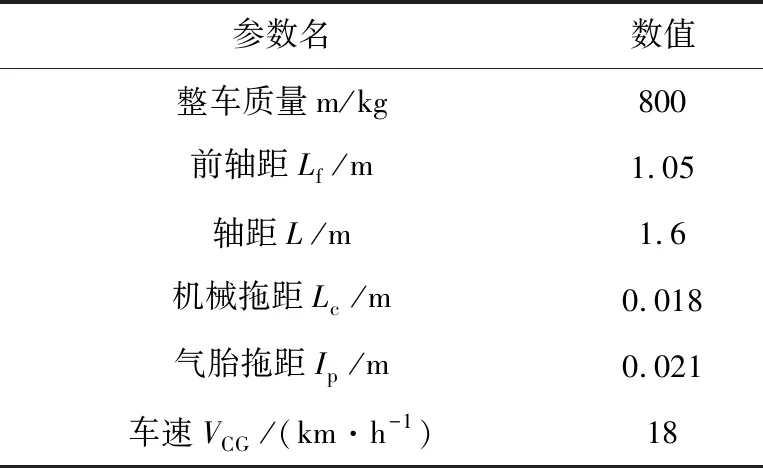
表1 CarSim车辆动力学模型参数
取期望的车轮转角为:
(22)
图3是基于PID控制的车辆横摆角速度仿真结果。
图3(a)和(b)表示PID控制对理想横摆角速度的跟踪性能,由图可知,PID控制可以实现横摆角速度的稳定跟踪,但具有一定的误差,范围保持在-0.25~0.25 rad/s;图3(b)中的跟踪误差存在较大的波动,分析其原因是PID稳定性控制器受车辆参数不确定性的影响较大,故呈现出一定幅值的抖振。

图3 基于PID的稳定性控制仿真结果
图3(c)表示控制策略对期望车轮转角的修正,其中期望车轮转角由式(22)给出,等效于转向盘的转角输入;补偿车轮转角由稳定性控制策略计算得到,是指要达到理想的车辆横摆角速度所需要的补偿转角;修正车轮转角指为达到目标横摆角速度所需要的实际期望车轮转角。
仿真结果中,在第5,15,25 s时补偿转角的峰值呈增大趋势,分析其原因是车身质量的惯性导致在改变横摆角速度变化方向时需要更大的车轮转角来实现对目标横摆角速度的跟踪。
3.2 基于自适应滑模的车辆稳定性控制仿真
定义滑模函数为s=γ-γD,自适应律的系数为η1=1.5,η2=1.5,η3=1.5,切换增益为η=0.05,滤波器的截止频率为20 rad/s,并选取与3.1节相同的期望车轮转角。图4是基于自适应滑模控制的车辆横摆角速度的仿真结果。

图4 基于自适应滑模的稳定性控制仿真结果
图4(a)和(b)表示自适应滑模控制对理想横摆角速度的跟踪性能,跟踪误差范围在-0.05~ 0.05 rad/s,较PID控制具有更小的跟踪误差。
图4(c)表示控制策略对期望车轮转角的修正,其原理与PID控制相似,且图4(c)中在第5,15,25 s时,补偿转角的峰值呈增大趋势的原因与PID控制一样。但是自适应滑模控制的补偿车轮转角较PID控制更加平滑,削弱了参数不确定性对补偿转角的抖振影响。

图4(e)表示车辆稳定性控制器的滑模函数,其在有限误差的范围内沿着零位置振荡,符合滑模控制在Lyapunov意义上的稳定性要求。
综上对比分析,基于自适应滑模的车辆稳定性控制策略具有更好的鲁棒性和稳定性。
4 结束语
针对车辆参数的不确定性,本文提出了一种基于自适应滑模的车辆稳定性控制策略。该策略采用自适应律对具有不确定性的参数进行在线估计,再结合传统滑模控制设计出满足Lyapunov稳定性要求的车辆稳定性控制器,以实现车辆转向时的稳定性控制。基于MATLAB/Simulink和Carsim的联合仿真平台,验证了在相同期望车轮转角下,自适应滑模控制较PID控制在减小横摆角速度误差和削弱参数不确定性的影响方面具有更好的鲁棒性和稳定性。
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
解放军健康(2017年5期)2017-08-01
中学生数理化·高一版(2017年3期)2017-07-08
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
