
基于ADAS实验平台ACC系统控制研究
2020-09-26 09:43姜阳石晶付阳
汽车实用技术 2020年17期
姜阳 石晶 付阳

摘 要:随着道路上交通事故发生率越来越高,汽车的发展速度也越来越快,为了降低由于驾驶员驾驶车辆途中发生事故的发生率,减少人员伤亡和财产损失。文章将在ADAS实验平台下,实现 MATLAB/Simulink 和 CarSim 软件的联合仿真,对ACC系统控制研究。
关键词:自适应巡航;ADAS实验平台;联合仿真
中图分类号:U471.15 文献标识码:A 文章编号:1671-7988(2020)17-49-02
ACC System Control Research Based on ADAS Experimental Platform*
Jiang Yang, Shi Jing, Fu Yang
(College of Automobile and Transportation Engineering, Liaoning University of Technology, Liaoning Jinzhou 121000)
Abstract: As the occurrence rate of traffic accidents on the road is higher and higher, the development speed of automobiles is also faster and faster. In order to reduce the occurrence rate of accidents caused by drivers driving vehicles on the way, and reduce casualties and property losses. In this paper, the joint simulation of MATLAB/Simulink and CarSim software will be implemented under the ADAS experimental platform to study the ACC system control.
Keywords: Adaptive cruise; ADAS experimental platform; Joint simulation
CLC NO.: U471.15 Document Code: A Article ID: 1671-7988(2020)17-49-02
前言
自適应巡航系统是智能辅助驾驶系统中研发较早技术较为成熟的车辆驾驶系统。是由传统的巡航控制(CC)基础上发展起来的,所以既具有传统的巡航功能,又具有现代不同工况下的适应能力[1]。作为ADAS的研究热点,在乘用车以及商用车领域均取得广泛的研究。ACC系统通过控制制动力驱动力,可以有效减轻驾驶员的负担,避免因误操作或疏忽造成的恶意交通事故,提高道路利用率,确保行车安全[2]。
1 ACC系统
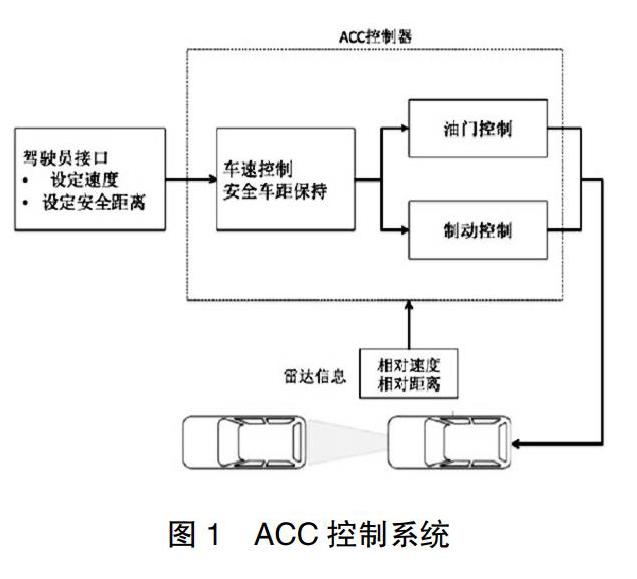
ACC控制系统主要由雷达传感器、ACC控制器、执行器三部分组成。雷达传感器目前主要以毫米波雷达和激光雷达为主。其作用都是探测前方信息主要是车辆行驶状态信息。ACC控制器是整个系统中的电子控制单元。将雷达传感器采集的信号经过设计好的控制策略和算法做出适当的控制命令。执行器主要是准确的执行电控单元计算发出的指令。主要为控制车辆的节气门开度和制动力[3]。如图1。
2 ADAS实验平台
ADAS实验平台采用美国国家仪器公司的操作系统,由中华V3驾驶模拟器、主控计算机、实时采集系统和快速原型控制器组成[4]。以CarSim仿真软件为核心的仿真软件用于设置车辆模型、道路模型、场景设置的初始状态、仿真时间和相应的数据接口等仿真参数。实时采集系统用于在驾驶模拟器中捕获制动、转向、加速度等信号,在CarSim中设置虚拟雷达和摄像机信号,通过Can通讯信号传输到快速成型控制器,在经过控制策略和算法计算结果再将采集到的信号传输到驾驶模拟器上,在主控制计算机中,车辆动力学信号、虚拟雷达信号和摄像机信号可以实时显示,进而实现高级驾驶辅助功能。
3 软件联合仿真
CarSim是 MSC公司开发的车辆动力学仿真软件。该软件性能较好动力学模型。其功能主要包括:模型设置和参数设置、数学模型的求解与输出仿真3D效果演示动画[5]。
Simulink 是 MATLAB 中的一部分,具有 动态系统建模、仿真和分析等功能。
在CarSim与Simulink联合仿真时,首先需要定义CarSim与Simulink 的接口,CarSim的输入接口控制巡航车辆的驱动与制动。ACC系统需要获取从CarSim 中的车辆信息以及传感器探测的信息,CarSim的输出本车信息接口和雷达信息接口。本车信息包括车辆速度、变速器、制动踏板信号、加速器踏板信号、车辆左右转向信号、自加速信号、发动机转速信号等。雷达信号结口包括前后车相对距离、相对速度和相对角速度信号等。
3.1 仿真分析
设置前车与后车开始车速都以72 km /h的初始速度行驶,二者相距60m,设置主车以90 km /h巡航行驶,20s后
开始以-1.0 m /s的加速度减速10s,后以36 km /h的速度行驶,仿真时间为60s。仿真结果如图2。
4 结论
本文将设计好的自适应巡航控制策略及算法通过Simulink 建模,然后将控制策略算法和搭建模型运行到ADAS 实验平台上进行仿真。运用 Carsim 作为仿真软件,可实现对设计好的 ACC 系统的进行仿真验证。并且提供了虚拟实车验证试验平台,为基于ADAS实验平台ACC系统控制研究打下基础。
参考文献
[1] 吴光强,张亮修,刘兆勇,郭晓晓.汽车自适应巡航控制系统研究现状与发展趋势[J].同济大学学报(自然科学版),2017,45(04):544- 553.
[2] 孙鹏飞.汽车自适应巡航系统(ACC)起停控制研究[D].吉林大学, 2018.
[3] 李肖含.汽车自适应巡航控制系统模糊控制策略研究[D].北京理工大学,2015.
[4] 许广吉,石晶.ADAS实验平台硬件在环仿真[J].汽车实用技术, 2019(09):42-43.
[5] 王凯强.自适应巡航控制算法及策略研究[D].辽宁工业大学,2019.
