伺服驱动器转速控制技术探讨
2020-10-20 10:06区均灌
写真地理 2020年16期
区均灌

摘要: 为了将伺服驱动器的速度环内的响应和抗干扰能力进一步的提升,本论文提出了一种拥有转速观测器的速度环设计和建立的办法。通过有效的建模将速度闭环分解为前向和反馈两种控制,并对这两种控制进行分析,同时将拥有Bang-Bang控制的前向抗积分饱和和PI速度调节器设计出来,在符合状态方程能控基础之上,将依据转速观测器方法设计的速度反馈控制器进行有效的提出。
关键词: 伺服驱动器;速度环;M/T测速法;PI调节器;转速观测器
【中图分类号】TP273 【文献标识码】A【文章编号】1674-3733(2020)16-0215-02
1M/T和速度环建模的原理
1.1速度环建模
驱动器通常的控制对象都是永磁同步电机,这类电机所对应的模型通常为非线性的、强耦合的系统。因此为了能够控更加的线性化,需要在进行驱动器具体的设计过程中,在矢量控制的基础上将直轴的电流设计为零。另外必须说明的是,矢量控制的基本理念是进行坐标的转换,将定子电枢电流的矢量分解为直轴电流(励磁电流分量),以及交轴电流(转矩电流分量),将上述两电流进行正相相交。之后在将直轴电流设为零,如此可以将算法进一步的简化,这样的做法是在普通的同步电机之上,可以对直流电机的控制曲线和规律进行进一步的模拟处理,并在最后真正的实现线性的解耦调节。具体情况详见下面图1所示。(注:图1为交流伺服驱动器系统电流、速度双闭环动态结构图)
依据设计中多环控制的先内后外原则,应该先将GACR设计出来,之后才将图1中虚线部分所示的内容视为一个整体环境进行速度环的设计。通过资料分析可以知道,电流环的传递函数可以被简化成为1个1阶的部分环节。将电流环等效的环节替代图1中虚线内的部分后,可以得到下面图2。(注:图2为交流伺服驱动器系统速度环动态结构图)
通过对图2的分析,并且将GASR(设计速度调节器)、GSF(速度反馈控制器)的有关参数确定后,可以实现对整个速度环的设计。
1.2M/T测速法原理及误差分析
现如今伺服驱动控制广泛采用的编码器,都为增量式的光电编码器。这种光电编码器经常使用的数字测速方法有三种,分别是M法、T法、M/T法。三种方法的介绍详见表3,M/T法原理如图3所示(注:图3为M/T测速法原理图)。
序号方法具体表示
1M 法又称为测频法,是在一定的时间窗口内测取光电旋转编码器所输出的脉冲个数,用以计算这段时间窗内的平均转速。
2T 法又称为测周法,是在光电旋转编码器两个相邻的脉冲输出间隔时间窗口内,用一个计数器对已知频率的高频时钟脉冲进行同步计数,并由此来计算电机转速,其测速的时间窗口大小依赖于光电旋转编码器输出的脉冲周期。
3M/T法测速法则综合了M 法和T 法(表3)
2带有转速观测器的速度环设计
2.1速度调节器设计
依据建模的有效分析可以知道,驱动器其速度环设计为GASR(速度调节器设计),以及GSF(速度反馈控制器设计)两个部分,那么如何使用最为有效的手段实现前向设计,就是整个驱动系统的关键所在。通过图2可以将速度调节器控制对象的传递函数推演出来,具体如下:
(公式1)
由此可见速度环控制的是一个积分和惯性环境相串联的对象。并且为了实现转速没有静态差存在,将一个积分环节放置于负载扰动作用点之前是必须的,其包含在速度调节器当中。又因为在扰动作用点后已经设置了一个积分,因此需要将速度环设计成Ⅱ型。如此就可以满足基本的需要了,所以将速度调节器选为PI调节器,其基本公式如下所示:
(公式2)
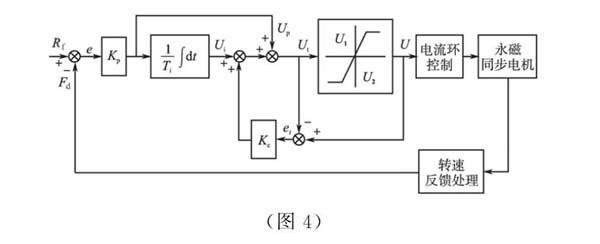
从具体的使用角度来看,若是将速度调节器不饱和进行限制,在电机启动或是速度转变时,会产生非常大的超调,因此在本次设计当中,将速度调节器设定成有Bang-Bang控制机制的前向抗积分饱和PI 调节器,具体详见下图4所示。(注:图4为交流伺服驱动器系统速度调节器结构图)
2.2转速观测器设计
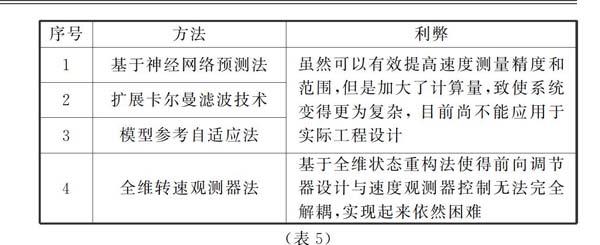
本次设计作为闭环的运动控制设计,其转速的精度高低,对于驱动器的速度反应和位置追踪的提升有着非常重要的作用,而为了将传统驱动器速度环中M/T测速法存在的弊端克服,目前采用了四种方法,具体方法以及利弊详见下面表5。
实事上在驱动器速度环之上采用全维观测器不是必然需要的,因为要重新设置状态变量只有速度变量可以用,同
序号方法利弊
1
2
3
基于神经网络预测法
扩展卡尔曼滤波技术
模型参考自适应法虽然可以有效提高速度测量精度和范围,但是加大了计算量,致使系统变得更为复杂, 目前尚不能应用于实际工程设计
4全维转速观测器法基于全维状态重构法使得前向调节器设计与速度观测器控制无法完全解耦,实现起来依然困难
时输出变量里还含有可以进行直接测量的状态变量。所以相对使用状态反馈来说将速度观测器引入将会帮助设计变得更为简易,具体详见下图5所示。(注:图5为电机转速估计的反馈观测器设计模型)
結束语
本次研究将拥有转速观测器的驱动器速度闭环设计方法进行了提出,同时将速度调节器抗积分饱
和PI控制器也设计了出来,其做到了两个优点,第一是提升了速度闭环调节器的灵敏性能,第二是将智能算法引入给系统带来的困难进行了克服,希望本文能够帮助广大的设计单位,在驱动器设计过程中进行参考和借鉴。
参考文献
[1]祝晓辉,李颖辉.永磁同步电机高增益速度观测器设计与仿真研究[J].系统仿真学报,2015,19(11):2550-2554.
[2]秦晓飞,王云宽,郑军,等.交流伺服系统振动鲁棒M/T测速算法[J].电机与控制学报,2014,5(14):96-102.