捷联式重力无源导航系统
2020-10-28 05:05蔡体菁黄俊翔
压电与声光 2020年5期
蔡体菁,黄俊翔
(东南大学 仪器科学与工程学院,江苏 南京 210096)
0 引言
海洋对经济发展和国家安全的作用越来越重要,探索和开发海洋已成为我国一个战略任务。水下自主导航是完成这个战略任务的重要手段,重力无源导航具有长航时、高精度和隐蔽性好的特点,受世界各海洋大国的高度重视,成为一个重要的研究方向[1-2]。20世纪80年代,美国研制出含有通用重力敏感模块的无源导航系统[3-4],该无源导航系统水下航行时间长,导航精度高,能延长惯性导航系统的重调周期,但成本较高。为实现低成本的重力无源导航系统,东南大学提出了一种由速率方位惯性平台、重力传感器、重力图、深度计和计程仪组成的重力无源导航系统[5]。近十几年来,我国惯性技术发展迅猛,激光陀螺旋转捷联惯性导航系统定位精度和捷联式重力仪测量精度得到提高[6-8],且其成本较低。本文提出的捷联式重力无源导航系统由激光陀螺单轴旋转捷联惯性导航系统、计程仪、深度计、光纤陀螺捷联式重力仪和数字重力异常图组成。2019年底,捷联式重力无源导航系统进行了长时间船载试验后,对该系统的试验数据进行了离线处理,试验结果表明,在重力异常变化显著区域,运载体位置误差小于1个重力异常图网格大小。
1 捷联式重力无源导航系统硬件
本文提出的捷联式重力无源导航系统的激光陀螺单轴旋转捷联惯性导航系统由国防科技大学研制,主要由3个90型二频机抖激光陀螺仪、3个高精度摆式挠性加速度计和转位机构等组成。光纤陀螺捷联式重力仪由北京航天控制仪器研究所研制,主要由3个高精度光纤陀螺仪、3个高精度摆式挠性加速度计及精密温控装置等组成。计程仪和深度计是搭载船只固有的。数据采集、组合导航计算机和显示系统由东南大学研制,数据采集系统实时记录激光陀螺单轴旋转捷联惯性导航系统、计程仪、深度计、光纤陀螺捷联式重力仪的输出信息,导航计算机采用现场可编程门阵列(FPGA)+数字信号处理(DSP)+ARM架构,内部存贮数字重力异常图,执行重力实时数据处理和惯性/重力匹配计算任务。数据采集、组合导航计算机和显示系统与其他系统和传感器的连接关系如图1所示。

图1 捷联式重力无源导航系统框图
2 重力无源导航算法
重力无源导航算法由激光陀螺单轴旋转捷联惯性导航系统导航算法、光纤陀螺捷联式重力测量系统导航和重力异常算法、重力匹配算法3部分组成。
2.1 单轴旋转捷联惯性导航系统导航算法
激光陀螺单轴旋转捷联惯性导航系统的3个加速度计和3个激光陀螺仪与转位机构固联,加速度计和陀螺仪输出经误差补偿后投影到载体坐标系上,转位机构坐标系与载体坐标系的旋转角度由转位机构的测角转置给出。根据陀螺仪输出角速度、导航坐标系旋转角速度和地球角速度计算出姿态矩阵。补偿后的加速度计比力经姿态矩阵变换到导航坐标系上,消除有害加速度,再积分可得到速度和位置。激光陀螺单轴旋转捷联惯性导航系统导航算法流程如图2所示。激光陀螺单轴旋转惯性导航系统的姿态、速度和位置的计算方法,除转位机构坐标变换外,与捷联惯导姿态、速度和位置的计算方法相同。

图2 激光陀螺单轴旋转惯性导航系统导航算法流程
2.2 捷联式重力测量系统导航与重力异常算法
要实时获得重力异常值需实时知道重力仪的位置、速度和姿态角。光纤陀螺捷联式重力仪主要由3个相互正交放置的高精度光纤陀螺仪和3个高精度摆式挠性加速度计组成。根据捷联式重力仪的陀螺仪输出角速度和加速度计输出比力经捷联导航算法计算,就可得捷联式重力仪的位置、速度和姿态角。把激光陀螺单轴旋转捷联惯性导航系统提供的位置信息、计程仪提供的速度信息和深度计提供的水深信息作为重力测量系统的观测量,应用扩展卡尔曼滤波计算出地理坐标系下的比力值。使用低通滤波器对重力改正后数据进行滤波得到重力异常值。光纤陀螺捷联式重力测量系统的导航算法与捷联惯导参考书的计算方法相同。下面只给出光纤陀螺捷联式重力测量系统的滤波方程。
光纤陀螺捷联式重力测量系统滤波状态方程为
(1)
式中:Xk为系统状态向量;Φk+1/k为状态转移矩阵;Γk+1为系统的噪声转换矩阵;Wk为噪声矩阵。
状态向量为
X=[δvE,δvN,δL,δλ,δh,φE,φN,φU,δGx,
δGy,δGz,δAx,δAy]T
(2)
式中:φE,φN,φU分别为捷联惯导数学平台的3个误差角;δvE,δvN分别为东、北向速度误差;δL,δλ,δh分别为经度、纬度和高度误差;δGx,δGy,δGz分别为陀螺仪x、y、z轴的零位漂移;δAx,δAy分别为加速度计x、y轴的零位偏置。W由陀螺仪和加速度计的白噪声组成:
W=[wgx,wgy,wgz,wax,way]T
(3)
状态转移矩阵:
Φk+1/k≈En+Fk·Δt
(4)
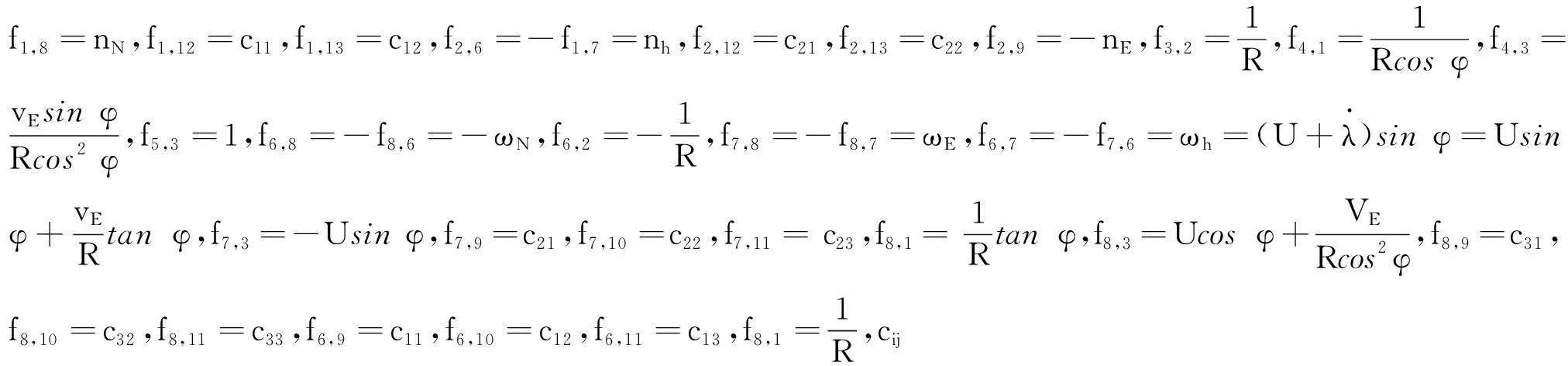
光纤陀螺捷联式重力测量系统的观测方程为
Zk+1=Hk+1Xk+1+Vk+1
(5)
式中:Zk+1为观测向量;Hk+1为观测矩阵;Vk+1为观测噪声矩阵。具体如下:
(6)
式中:vE,I,vN,I分别为捷联惯导计算得到的东、北向速度;vE,DVL,vN,DVL为计程仪输出的东、北向速度;LI,λI,hI分别为旋转捷联惯导计算得到的经度、纬度和深度;LLG,λLG分别为激光陀螺单轴旋转惯性导航系统给出的经度和纬度;hD为深度计输出的深度。

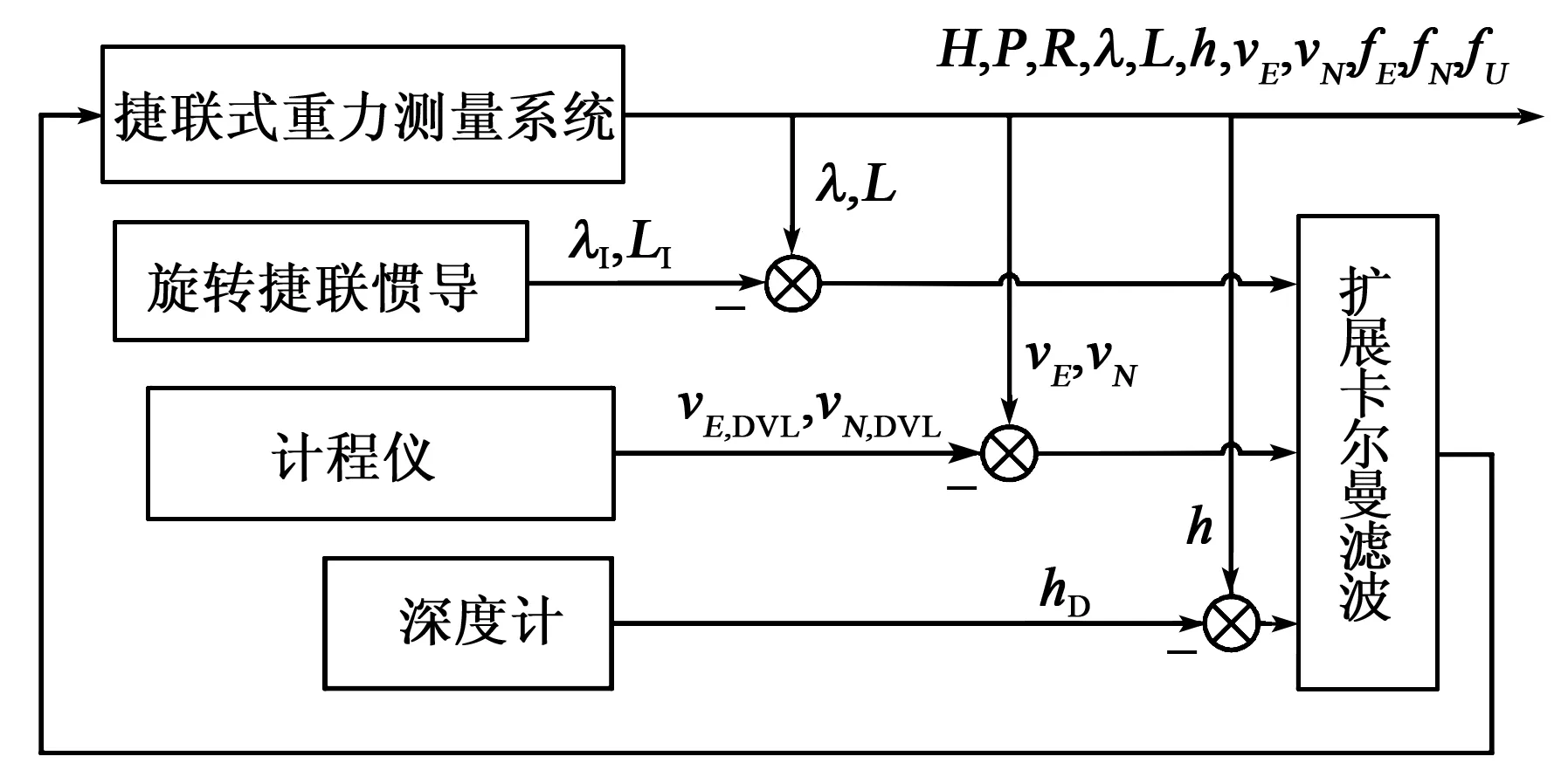
图3 捷联式重力测量系统观测量与卡尔曼滤波反馈示意图
得到东、北、天坐标系下的加速度计比力fE,fN,fU后,进行重力测量改正,如厄特弗斯改正、正常重力场改正,最后使用低通滤波消除海浪的影响,可实时获得重力异常值。
2.3 重力匹配算法
根据捷联式重力测量系统提供的位置信息,在计算机里的数字化重力异常图上找到对应的重力异常值。把捷联式重力测量系统得到的实测重力异常值与计算重力异常值做相关分析,得到相关极值点,该点所对应的位置就是匹配后的位置。
Δgt为重力测量系统实测重力异常值,Δgm为数字重力异常图上的重力异常值,考虑到捷联式重力测量系统加速度计零位漂移的影响,用相邻两点重力异常的变化量与数字重力异常图上对应两点的变化量作相关极值计算,即
(Δgm,i-gm,i-1)]2
(7)
式中:j表示第j路径;N表示点数。运载体最优路径的计算是使J(j)最小。
3 试验结果
2019年底,捷联式重力无源导航系统安装在某测量船上进行了长时间的海上搭载试验。数据采集系统记录下了捷联式重力无源导航系统的全程试验数据后,对该系统试验数据进行了离线处理,按式(1)~(7)计算方法,对某海区进行重力匹配计算。到达重力匹配区时,捷联式重力无源导航系统已连续工作7天,位置误差较大。采用上述重力匹配相关极值法,得到了匹配轨迹。图4为运载体的真实运动轨迹、捷联式重力无源导航系统指示轨迹和重力匹配轨迹。为了准确评价匹配点的位置误差,用GPS位置信息作为参考基准。匹配点误差为匹配点到GPS点的距离,导航系统位置误差为导航系统指示位置点到GPS点的距离。图5为匹配点误差与捷联式重力无源导航系统指示位置误差曲线。试验结果表明,在匹配海域,运载体位置误差小于1个重力异常图格网大小。

图4 真实轨迹、导航轨迹和匹配轨迹图

图5 匹配点误差与导航仪位置误差曲线
4 结束语
捷联式重力无源导航系统经离线船载试验数据验证,在匹配区域内该系统的位置误差小于1个重力异常图格网值。捷联式重力无源导航系统具有长航时、高精度、成本低的优点,可作为水下自主导航设备,可广泛应用于海洋探索和开发。
猜你喜欢
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
电子制作(2019年12期)2019-07-16
北京航空航天大学学报(2017年6期)2017-11-23
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
互联网天地(2016年2期)2016-05-04
火控雷达技术(2016年1期)2016-02-06
中国惯性技术学报(2015年1期)2015-12-19