光纤陀螺温变效应误差抑制方法研究
2020-10-28 05:05路彬彬张登伟
压电与声光 2020年5期
李 阳,黄 鑫,路彬彬,张登伟
(1. 南京电子技术研究所,江苏 南京 210000;2. 浙江大学 光电科学与工程学院 现代光学仪器国家重点实验室,浙江 杭州 310027)
0 引言
光纤陀螺(FOG)是惯性导航领域中的重要传感器,其高精度、全固态、启动快及动态范围大等优点符合当前军事应用的需求。目前由于温度场导致的非互易性零偏漂移误差限制了光纤陀螺精度的进一步提升[1-5],Lefevre将这一现象称为光纤陀螺温变效应误差[6-7],因此,解决这一问题已成为光纤陀螺进一步发展的关键。
温变效应误差的抑制方法有硬件优化和软件补偿。硬件优化主要通过改善热结构设计,增加温控[8],采用新的光纤环绕法[9-10]和工作原理[11-12]等方法实现,但会带来质量、体积增加,工艺复杂,光纤环结构强度下降等问题。软件补偿法易于工程实现,且抑制效果较好,其中线性误差模型[13-15]易于工程应用,但依赖于精确的误差模型和温度信息。采用神经网络等机器学习方法[16-17]可自适应进行最优模型识别,但受限于机上/弹上计算机运算资源,一般应用于非实时的数据后处理场合。通过经验模态分解,结合曲面拟合回归和自适应模糊推理联合建模的方法,可获得较好的补偿效果[18]。查表补偿法[19]具有实现简单,无需精确建模,实时性和补偿效果好的优点,具有很大的工程应用潜力。
本文通过光纤陀螺温变效应误差的原理分析与建模,提出基于查表法的启动温变效应误差抑制方法。通过实验验证其误差抑制效果,提供了一种有效的实时工程应用方案,对提升光纤陀螺的精度水平和系统应用性能具有重要意义。
1 方法原理
1.1 光纤陀螺温变效应误差模型
光纤陀螺温变效应误差体现为光纤陀螺内部温度场变化时的输出漂移误差,由广义Shupe效应、标度因数的温度效应和检测通道的温度效应组成,其中后两种效应可通过标度因数温度标定、半波电压闭环控制和选择低温度系数电子元器件得到很好抑制。因此,光纤陀螺温变效应误差主要来源为广义Shupe效应,其误差模型如图 1所示(图中Δφs=Ω·Ko为萨格奈克相位差),对应光纤陀螺的输出为
D=(Ω·Ko+Δφe)·Ke
(1)
式中:Ω为输入旋转角速率;Ko、Ke为光学、电学标度因数; Δφe为广义Shupe效应引起的加性温变效应相位误差。
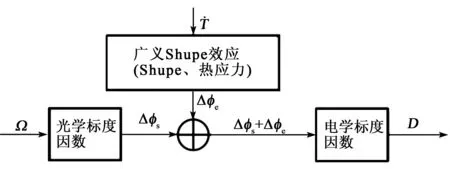
图1 光纤陀螺温变效应误差源
广义Shupe效应包括传统的Shupe效应及热应力效应,具体表示为
z,t)]·(L-2z)dz
(2)
由式(2)可知,当光纤环中相对光纤中点对称位置的温变速率相同时,即可消除广义Shupe效应误差。目前工程上采用四极对称绕法光纤环来抑制广义Shupe效应,但由于光纤直径限制,各层光纤间并非理想的关于光纤环中点对称,存在残余的温变效应误差,在高精度光纤陀螺中不可忽略。
1.2 光纤环等效非稳态温度场分析
已知各个时刻光纤环温度场分布,即可根据式(2)得到温变效应误差。光纤环各层光纤紧密缠绕,可看作一个性质均匀的整体,其主要的热传递方式是热传导。同时光纤环热分布为环形对称形式,且在轴向上均匀分布,可只针对光纤环截面进行二维热传导分析。建立简化的一维光纤环分析模型如图 2所示。图中,d为光纤环光纤截面宽度,内壁、外壁分别位于面向热源和背向热源的一侧。
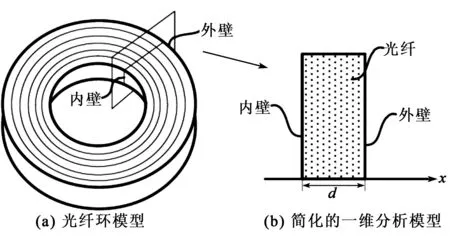
图2 简化一维光纤环分析模型
对于系统应用中的光纤陀螺,光纤环外部还包含有隔热层、外壳结构及外部的系统结构,可等效为多个导热特性不同介质层的叠加并看作一个整体。光纤陀螺启动后在有限时间段内,光纤环内表面所受热作用可看作只渗透到有限厚度范围内,可等效为“半无限大物体”,对应的等效模型如图 3所示。图中R为光纤环内侧半径。
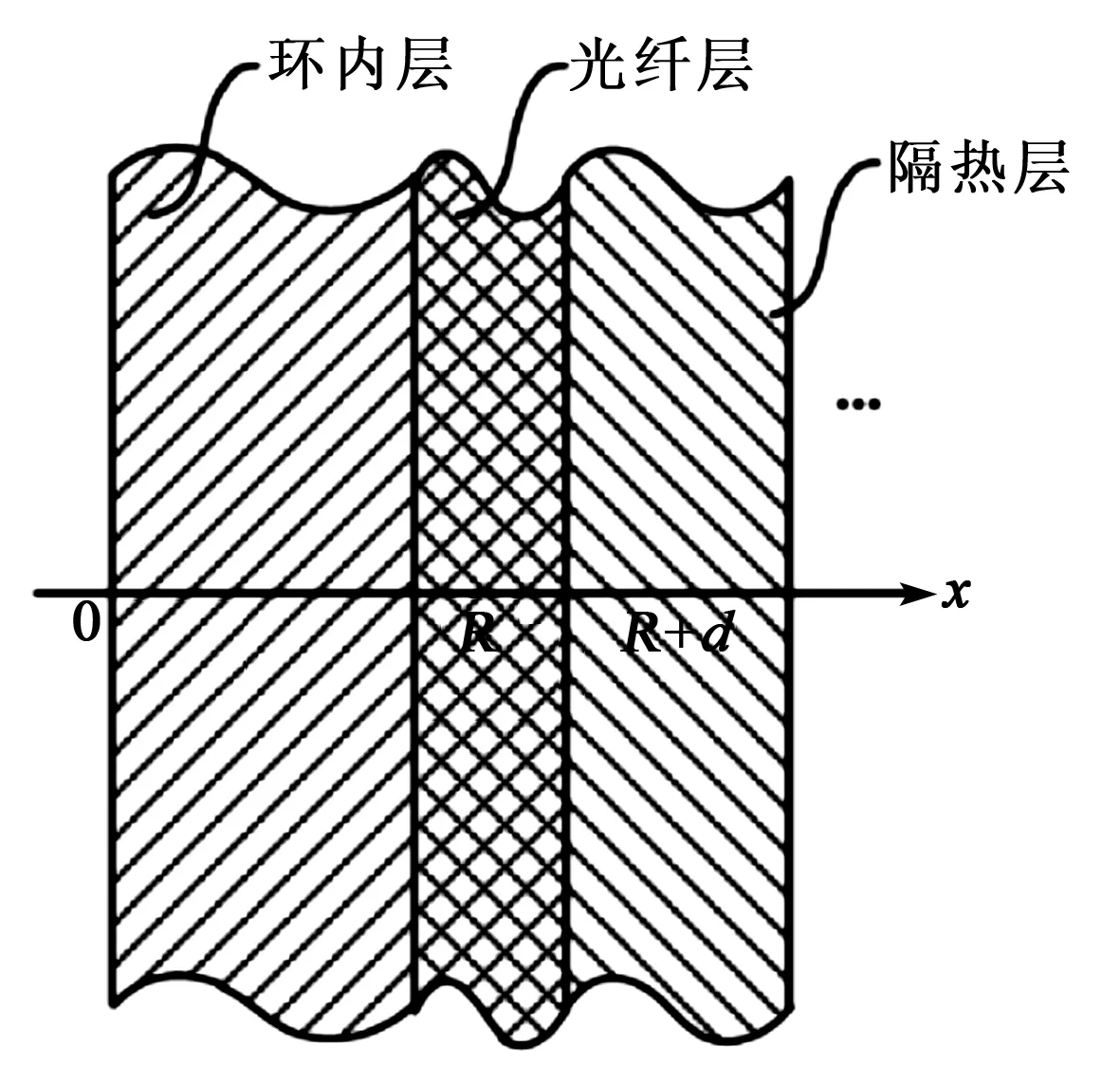
图3 光纤环半无限大物体等效分析模型
光纤陀螺初始温度为T0,启动时x=0位置处的边界温度突然提高到Tw并保持不变。引入过余温度θ=T-T0(T为光纤环内的温度),结合一维导热微分方程获得光纤环非稳态导热问题的数学描述为
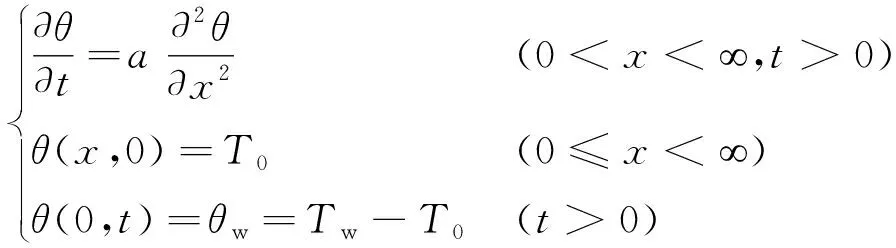
(3)
式中:a为热扩散系数;t为时间。初始条件为T(x,y,z,0)=T0。式(3)的解为
(4)
各个位置处温度的时间梯度为
(5)
将式(5)代入式(2)可获得光纤陀螺启动过程的温变效应误差模型,下面基于四极对称光纤环进行误差模型的推导与查表法抑制原理的阐述。
1.3 光纤陀螺温变效应查表法抑制原理

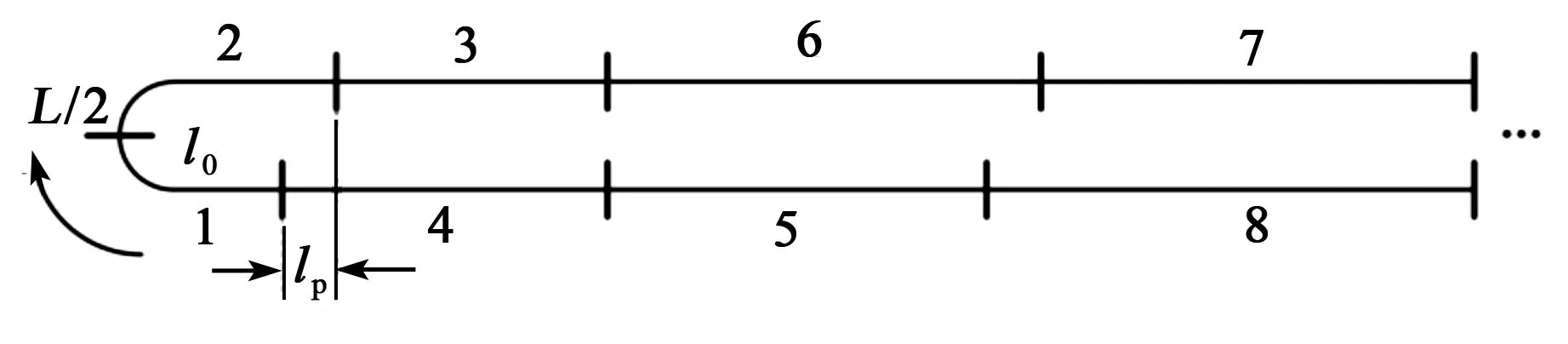
图4 四极对称绕法光纤环层分布示意图
根据式(2)可得离散化广义Shupe误差为
[lend(q,m)-lstart(q,m)]·
[L-lend(q,m)-lstart(q,m)]
(6)
式中lstart(q,m),lend(q,m)分别为第q个极子中第m层光纤的起点与终点坐标。将常数项进行合并可得:
(7)
根据式(5)可得温度时间梯度为时间t的单一变量函数:
(8)
可将式(7)进一步写为
(9)
因此,光纤陀螺启动过程的温变效应导致的相位误差为时间t的复杂函数,幅值由θw决定。在不同启动温度环境下,光纤陀螺内部热源不同的发热功率对应不同的边界过余温度,因此,幅值θw取决于启动时的环境温度T0。在不同启动温度环境下,温变效应误差具有相同时间变化趋势,只是具有不同的幅值。因此式(9)可改写为
Δφe(t)=θw(T0)·f(t)
(10)
式中:θw(T0)为温变效应误差幅值系数;f(t)为温变效应误差时间函数。
基于上述分析,可确定光纤陀螺启动温变效应误差的查表法抑制原理:通过实验获得不同标定启动环境温度Ti下的光纤陀螺启动温变效应误差,采用时间表格方法建立式(10)形式的时间函数F(t,Ti)。在光纤陀螺启动时,按照启动环境温度T和启动时间查询对应的时间表格,获得对应温变效应误差,并在光纤陀螺输出数字量中加以补偿,从而实现启动温变效应误差的抑制。
实际工程应用中,T≠Ti,根据温变效应误差模型可认为在一定温度范围内θw与环境温度成线性关系,此时可以取相邻最近的两个温度标定点Ti和Ti+1下的时间表格F(t,Ti)和F(t,Ti+1),根据温度值进行等比例插值获得T下的时间表格为
F(t,Ti)
(11)
1.4 光纤陀螺温变效应误差评价方法
为对温变效应误差抑制效果进行评估,需要统一的方法对误差进行量化。可参考惯导系统的圆概率误差(CEP)精度评估方法[20],计算光纤陀螺的漂移概率误差(DEP)。对光纤陀螺数据进行角度积分,将积分结果归化至1 h,获得每个采样时刻ti的漂移率为
(12)
式中θ(ti)为ti时刻的角度积分值。
ΩER服从均值为0,标准差为σ的一维正态分布,漂移概率误差ΩDEP(95%)为1.96σ,σ使用漂移率标准差估计值代替。光纤陀螺的漂移概率误差计算过程中使用角度积分值进行计算,避免了白噪声的影响,可直接量化评估温变效应误差。
另外,惯导系统的位置精度是反映其性能的重要指标,而光纤陀螺的漂移误差会直接导致导航的位置误差,因此,可直接采用系统位置误差进行误差评估。将光纤陀螺漂移数据代入导航解算过程,导航结果中仅包含有光纤陀螺漂移所带来的导航误差。根据惯导系统精度评定方法获得导航圆概率误差,反映了温变效应误差对系统误差的贡献。
综上所述,光纤陀螺漂移概率误差与惯导系统圆概率误差是温变效应误差的有效量化评估手段。在后续的实验数据分析中,采用DEP与系统CEP对温变效应误差进行评估。
2 实验结果与分析
实验中,采用温箱控制环境温度进行-40~+60 ℃的环境温度控制。温箱放置在隔振地基上,光纤陀螺静态放置于温箱内部。光纤陀螺采用稳压电源进行供电,输出数据通过串口发送至上位机,通过数据采集软件进行光纤陀螺输出数据的接收。整体实验装置示意图如图 5所示。
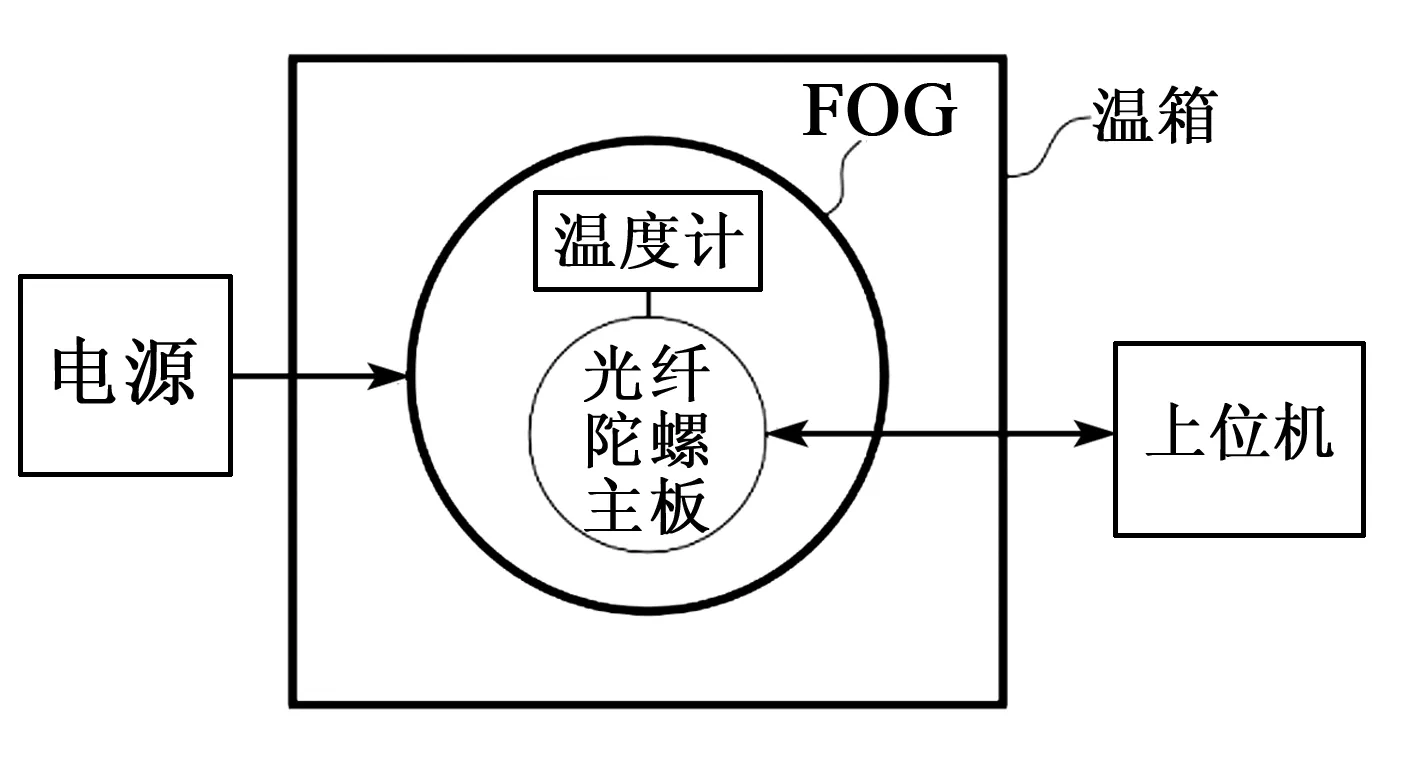
图5 实验装置示意图
为获得各个启动温度下的光纤陀螺启动温变效应抑制表格,同时验证各温度点下光纤陀螺启动温变效应误差查表法抑制效果,进行零状态重复启动实验。设置一固定的环境温度,对陀螺进行断电4 h、通电2 h的启动测试,每个温度测试4组数据。在每个温度点下,对多组启动数据按照时间点进行平均后进行中心滑动平均,获得一组噪声抑制后的光纤陀螺零状态启动趋势数据。根据第1.1节中光纤陀螺温变效应理论,当光纤陀螺内部温度场达到稳态时,其温变效应误差为0,因此,可以认为光纤陀螺启动测试数据中末段为不包含温变效应误差的输出。将光纤陀螺零状态启动数据减去数据末段的平均值,即获得该温度点下光纤陀螺温变效应误差抑制表格,流程如图 6所示。
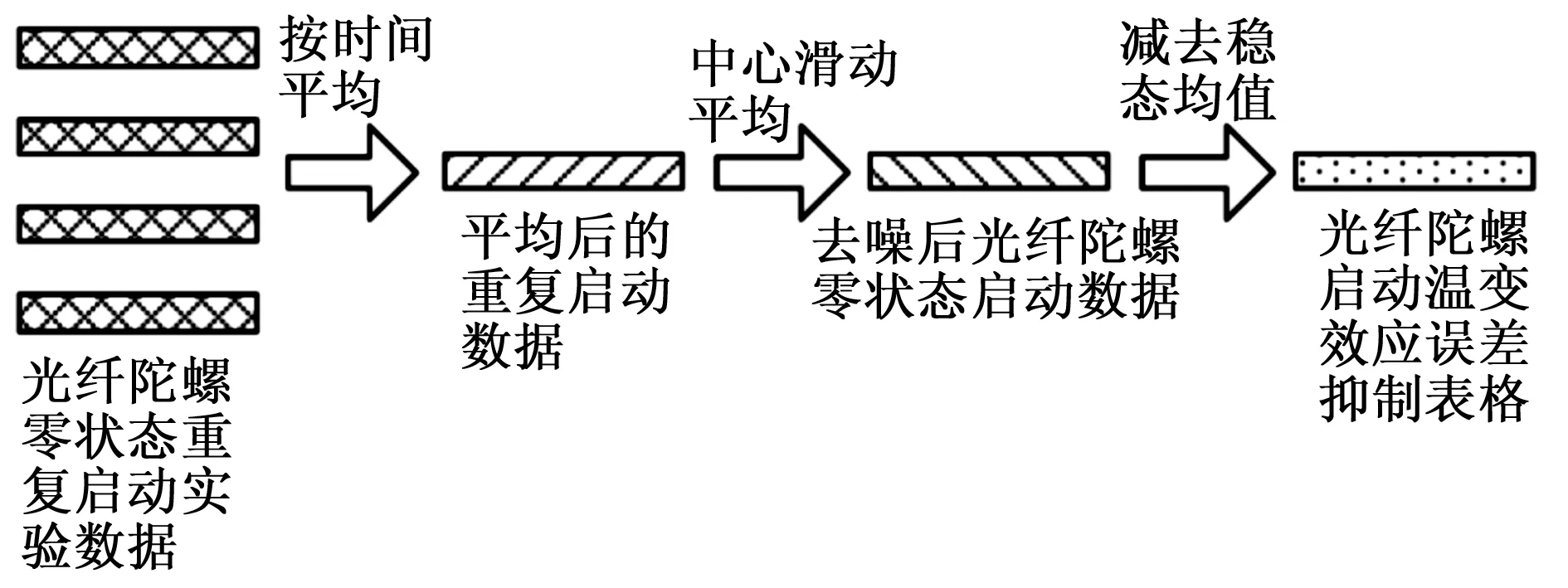
图6 误差抑制表格计算流程
根据误差抑制表格,对光纤陀螺零状态启动输出数据进行实时温变效应误差抑制。图 7为20 ℃条件下误差抑制前、后的光纤陀螺启动数据对比。
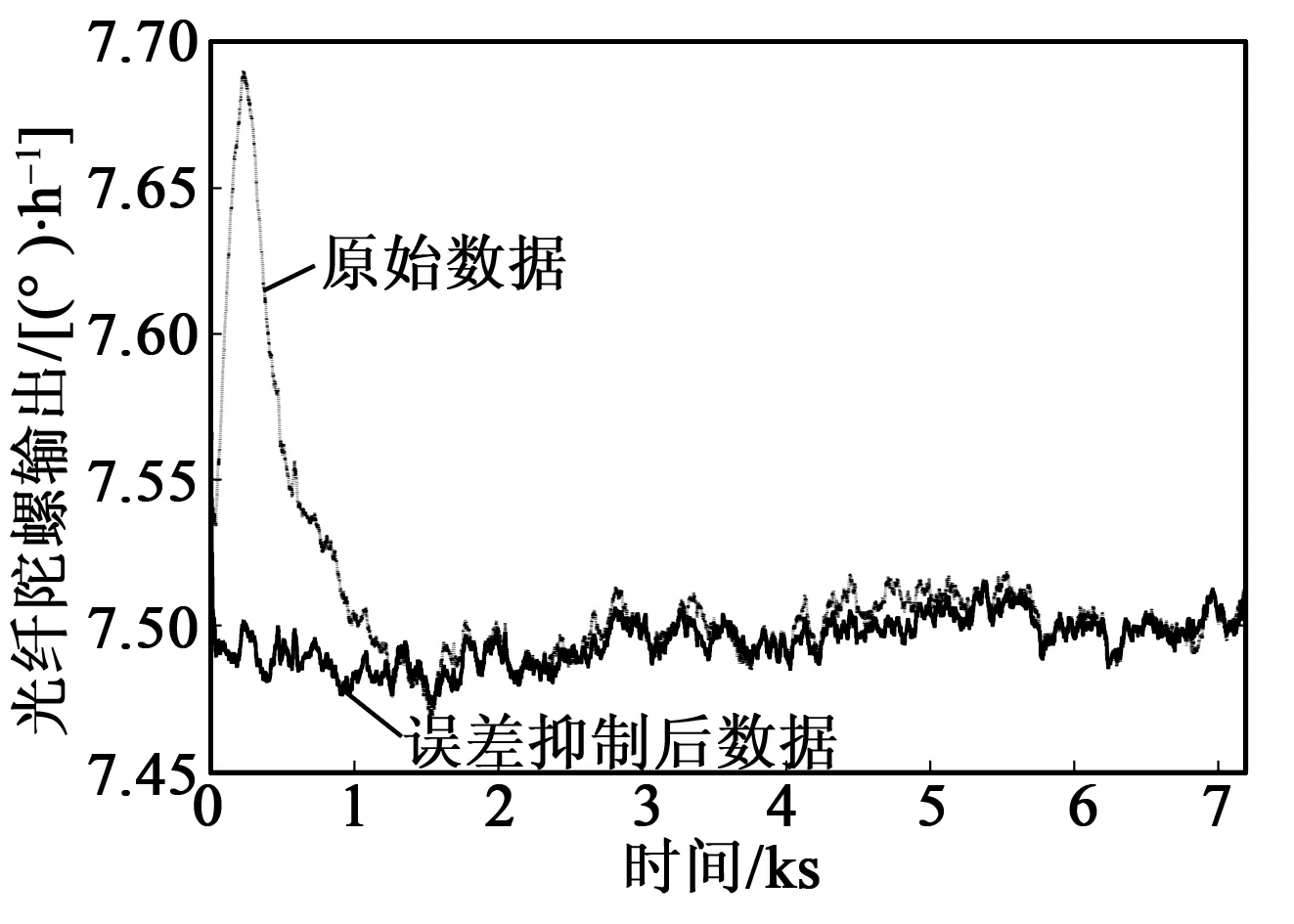
图7 20 ℃环境下误差抑制前、后对比
根据第1.4节中的温变效应误差评价方法计算误差抑制前、后的DEP和导航CEP,如表 1所示。误差抑制后DEP由0.10~0.12 (°)/h下降为0.004~0.006 (°)/h,误差剩余比小于6%。导航CEP从7~9 n mile/h降至0.5 n mile/h以下,误差剩余比小于7%。同时DEP指标与导航CEP指标成正相关。
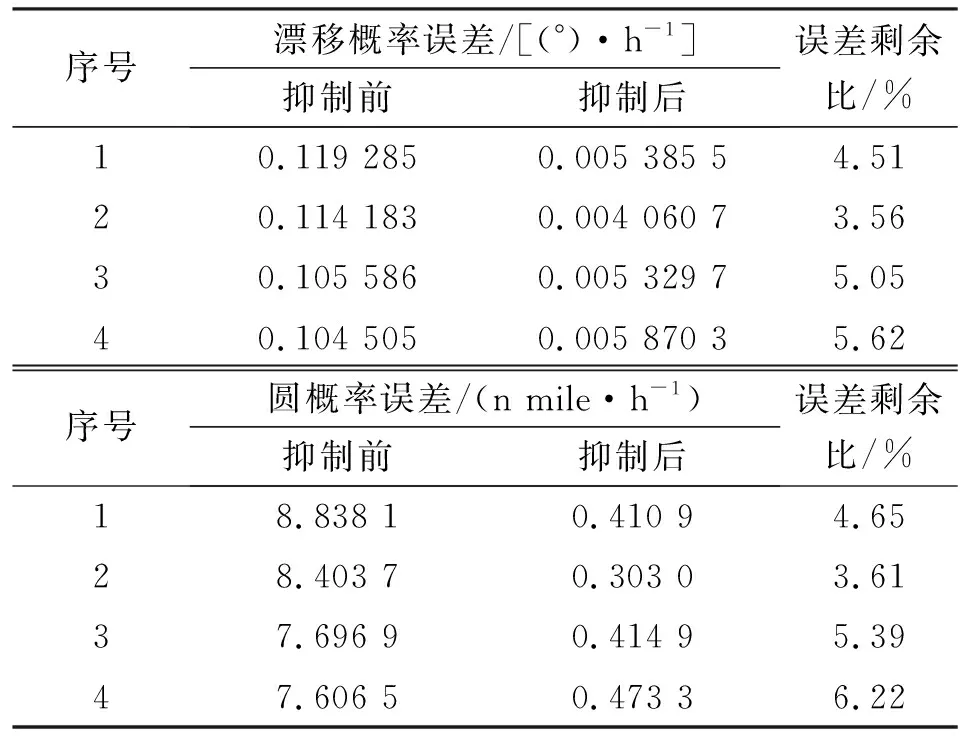
表1 20 ℃条件下误差抑制前、后的漂移概率误差与导航圆概率误差
为验证光纤陀螺温变效应误差模型在全温范围内的适应性,进行了全温条件下的光纤陀螺温变效应误差抑制实验。以10 ℃为间隔,在-40~60 ℃设置11个环境温度点进行光纤陀螺静态启动测试,测试时间为2 h。实验中,每次温箱调整温度后,对陀螺进行大于4 h的冷却,以保证陀螺内部温度场充分稳定。各个环境温度点下的测试数据表明,光纤陀螺温变效应误差在不同环境温度下的幅值不同,通过各个温度下的光纤陀螺启动温变效应误差抑制表格加以补偿后,温变效应误差下降较大。计算各个温度点下误差抑制前、后光纤陀螺的DEP与导航CEP指标,如图 8所示。
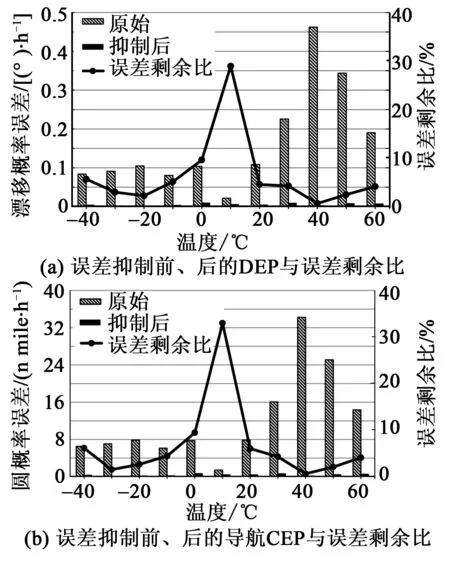
图8 全温条件下误差抑制前、后实验结果
由图8(a)可看出,温变效应误差模型在不同温度下的光纤陀螺DEP抑制效果不同,在40 ℃下抑制比最高,DEP误差剩余比为0.63%,而10 ℃下抑制比最低,DEP误差剩余比为28.94%。在10 ℃下,光纤陀螺自身的温变效应误差较小,原始光纤陀螺数据DEP为0.021 424 (°)/h,经过误差抑制后为0.006 200 (°)/h,因此,误差抑制比较小。对比图 8(b)、(a)可看出,导航CEP指标温度分布与光纤陀螺DEP指标相似,且两者误差剩余比也具有相同的趋势。在全温范围内,光纤陀螺DEP从0.02~0.5 (°)/h下降到小于0.01 (°)/h,而对应的导航CEP从1.4~35 n mile/h下降到小于0.8 n mile/h。
实验结果表明,通过应用光纤陀螺温变效应误差抑制法,常温条件下光纤陀螺DEP从0.10~0.12 (°)/h降至为0.004~0.006 (°)/h,对应导航CEP从7~9 n mile/h降至0.5 n mile/h以下;在全温度范围内,光纤陀螺DEP从0.02~0.5 (°)/h降至0.01 (°)/h以下,导航CEP从1.4~35 n mile/h降至小于0.8 n mile/h。该方法对光纤陀螺的温变效应误差具有有效的抑制作用,具有良好的一致性与全温度范围内的适应性,可有效降低由于温变效应导致的光纤陀螺漂移误差,提升对应导航系统精度。
3 结束语
本文根据光纤陀螺温变效应误差机理,结合光纤环等效非稳态温度场分析,获得了启动状态下温变效应误差等效数学模型。等效数学模型中的幅值系数仅与环境温度有关,并对于状态固定的光纤陀螺其时间函数保持不变,根据这一特点提出了基于查表法的光纤陀螺温变效应误差抑制方法。同时根据光纤陀螺的数据特征与系统应用特点,提出了采用漂移概率误差和导航圆概率误差对温变效应误差进行量化评估。开展了全温条件下温变效应误差抑制实验,实验中获得了90%以上的误差抑制效果,全温环境下系统导航定位误差从最大34.221 3 n mile/h降至0.730 4 n mile/h。实验结果表明,通过该文误差抑制方法的应用,有效抑制了光纤陀螺温变效应误差,提升了相应的系统性能,具有很强的工程应用价值。
此外,当考虑更恶劣的应用环境时,外界环境为变温条件,根据温变效应误差模型,其内部的热传导过程相当于一个时变边界条件的传热过程,若仍采用固定温度下的误差抑制表格会导致较大的剩余误差。此时可通过标定获得的环境温度与误差抑制表格幅值系数间的关系,根据外界环境温度实时调整幅值系数,以逼近变温条件下的温变效应误差。变温条件下的温变效应误差抑制,需要进一步试验研究,是后续研究的重点方向。
猜你喜欢
Bone Research(2021年2期)2021-09-11
家庭影院技术(2020年1期)2020-06-24
小学生学习指导(低年级)(2019年10期)2019-10-16
家庭影院技术(2019年4期)2019-04-17
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
家庭影院技术(2018年9期)2018-11-02
快乐语文(2018年36期)2018-03-12
电子制作(2017年13期)2017-12-15
汽车维护与修理(2016年10期)2016-07-10