
级联式信道化和异构服务器的ESM系统组合架构
2020-11-05 08:53张剑云周青松
探测与控制学报 2020年5期
彭 平,张剑云,周青松,赵 利
(1.国防科技大学电子对抗学院,安徽 合肥 230031;2.解放军31104部队,江苏 南京 210028)
0 引言
在现代ESM中,雷达信号密集复杂、交错多变、频带宽开,模拟接收机难以实现对雷达侦察信号的全概率截获和高精度测频,加上新体制雷达的抗截获、反侦察和抗干扰能力不断完善[1],使得基于传统的FPGA、DSP架构的处理机难以实现电子支援侦察信号的实时分选。这对ESM系统中的侦察接收机和信号处理机的设计提出了挑战,因此在设计时需解决两个问题:一是如何设计出能实现全概率截获和高精度测频的宽带侦察接收机;二是如何设计出能对从接收机前端获得的大吞吐量高速数据流实时分选的信号处理机。
在电子战领域,搜索式超外差接收机、瞬时测频接收机和信道化测频接收机等模拟接收机技术相对成熟,在ESM系统中应用较为广泛,而数字接收机特别是数字信道化接收机受限于硬件水平,一般作为模拟接收机的补充,处于辅助和从属地位[2]。将宽带雷达侦察信号进行折叠信道化再进行数字信道化是将超外差与数字信道化的优势相结合,即将宽带信号折叠在同一个频段上再进行数字信道化的并行处理,不仅可以解决大宽带信号的处理问题,还可以实现高灵敏度接收,而且接收的信号能长期存储、信息损失少,可以在截获后实现较为复杂的算法进行分选识别。
信号处理机则以传统的FPGA+DSP架构为主,以PowerPC通用处理器嵌入式开发为辅。为了适应分选识别技术的发展,以及实现通用性、易开发和软件化等要求,近年来使用CPU+GPU架构的信号处理机来实现一些复杂算法成为一种趋势。如2017年哈尔滨工业大学的刘楠提出基于GPU并行计算的雷达信号分选算法,在先验知识不足的情况下使用Fast-ICA的K-Means聚类算法能够满足实时性分选要求[3],但如果没有经过精确测频引导,分选准确率将会受到影响。2019年西南电子技术研究所的庄跃迁提出一种基于高性能GPU的实时脉内分析实现方案进行分析处理,在信号分选之前即对雷达信号脉冲分析处理,获取其调制样式及调制参数,利用GPU的阵列并行处理能力,能够大幅度提高雷达信号分选的正确率[4],该方案运用于ESM系统时也需考虑对宽带雷达侦察信号全概率截获和高精度测频的要求。也有学者在CPU+GPU异构服务器的基础上对雷达信号的处理进行了研究,能够满足搜索探测的雷达信号处理要求,但对于雷达侦察支援信号的处理却鲜有提及。
为解决现代ESM系统难以同时实现对复杂交错宽带雷达侦察信号全概率截获、高精度测频和实时可编程分选的问题,本文提出级联式信道化和异构服务器的ESM系统组合架构。
1 级联式信道化和异构服务器的ESM系统组合架构
侦察接收机和信号处理机主要负责雷达信号和数据的处理,是ESM系统的核心部分。从现代雷达对抗面临的信号环境和实战需求来看,二者必须整体设计、互相搭配才能共同支撑ESM系统。
按典型信号处理系统的物理结构进行功能建模,ESM系统主要由天线模块、侦察接收模块、信号处理模块、显示操控模块、记录模块等组成[2],典型ESM系统组成如图1所示。

图1 典型ESM系统组成框图Fig.1 Typical radar countermeasure support reconnaissance system block diagram
从侦察接收机的角度来看,严峻的ESM雷达信号环境对现代接收机的灵敏度、瞬时带宽、动态范围、频率选择性、实时性、灵活性、自适应性、在线可配置性、对同时到达信号的分辨率等提出更高的要求,表1将常见的模拟接收机与信道化接收机进行详细对比,为信道化接收机的选择提供了参考依据[2]。

表1 常见模拟接收机与信道化接收机的性能对比Tab.1 Performance comparison between analog receivers and channelized receivers
从信号处理机的角度来看,雷达侦察信号处理对点数、运算速度、数据传输速度等方面的要求比探测雷达信号处理更高,且没有先验信息作为参考,加上现代的ESM系统除了射频前端外其他很多模拟电路也通过软件来实现,因此对雷达侦察信号的分选识别、脉内特征分析等处理需要采取较为复杂的算法。而基于传统的FPGA、DSP或者PowerPC通用处理器等嵌入式硬件架构的雷达信号处理系统在运算能力、通用性、复杂算法实现和开发难度等方面存在一定的不足,表2将各类型处理器的性能进行了对比。

表2 各类型处理器性能对比Tab.2 Performance comparison for each type of processor
通过表2可知,异构服务器的整体性能比其他3种处理器要好,但考虑到FPGA可以并行运算,而DSP采用哈弗结构,它们都具有很强的实时性,是雷达信号处理系统的首选,所以需要通过实际性能测试来进行比较。
表3将雷达信号处理中常见的单精度1 024点FFT运算的测试情况进行了对比,测试结果验证了异构服务器用于ESM系统实时信号处理的可行性。

表3 各处理器单精度1 024点FFT运算性能测试对比Tab.3 Comparison table of performance test of 1024 point FFT operation with single precisionfor each processor
2 组合架构中宽带雷达信号高精度测频的实现
由于难以对截获的雷达侦察信号采用射频直接采样技术进行数字化,需要先借助模拟处理技术,即折叠信道化,先把宽带信号转换为适合于 A/D 采样的中频信号进行处理,因此本文采用折叠+数字级联式信道化的设计方法。
以机载ESM系统通常的工作频率范围,即2~18 GHz带宽的信号环境为例,具体设计流程为:第一步,首先用2~18 GHz带通滤波器把支援侦察目标范围以外的信号滤去,只留下保留处理频段2~18 GHz的信号;然后用低噪声放大器提高信噪比;最后用功分器将信号分为8路。第二步,8路信号分别经过2~4 GHz、4~6 GHz、6~8 GHz、8~10 GHz、10~12 GHz、12~14 GHz、14~16 GHz、16~18 GHz带通滤波器,分割成8个带宽为2 GHz的波段。第三步,用8个不同的本振(LO)将8个波段下变频为8路中心频率同为3 GHz、宽带同为2 GHz的中频模拟信号,相同的中心频率和带宽可以确保在后续带通采样时只需使用一个采样率就能实现数字化。第四步,用合路器将8路中频模拟信号统一折叠为2 GHz瞬时处理带宽的中频模拟信号,并根据检波器随机触发或顺序扫描仪扫描的结果判断折叠信号的所属波段。第五步,为满足2 GHz瞬时处理带宽要求并留有一定过渡带,使用4.8 GSPS采样率的ADC芯片进行采样[5],得到实际带宽为2.4 GHz的宽带数字中频采样数据并高速缓存。第六步,通过对缓存的2.4 GHz采样数据进行抽取分路、多相滤波和并行IFFT实现数字信道化,得到32路75 MHz的数字正交I、Q信号,独立信道数为16个,最后通过多路光纤并行输出至信号处理机。
上述流程的具体实现如图2所示,由图可以看出经过折叠信道化+数字信道化的处理,最终可以得到与信号带宽相适应的、有效带宽经过压缩的正交数字基带信号。在继承前文所述的信道化接收机优点的基础上,该设计方法还将采样率保持在非常高的水平上(4.8 GSPS),确保了频率分辨率,同时大大减小了模拟设备使用量,简化了系统设计,便于工程实现。
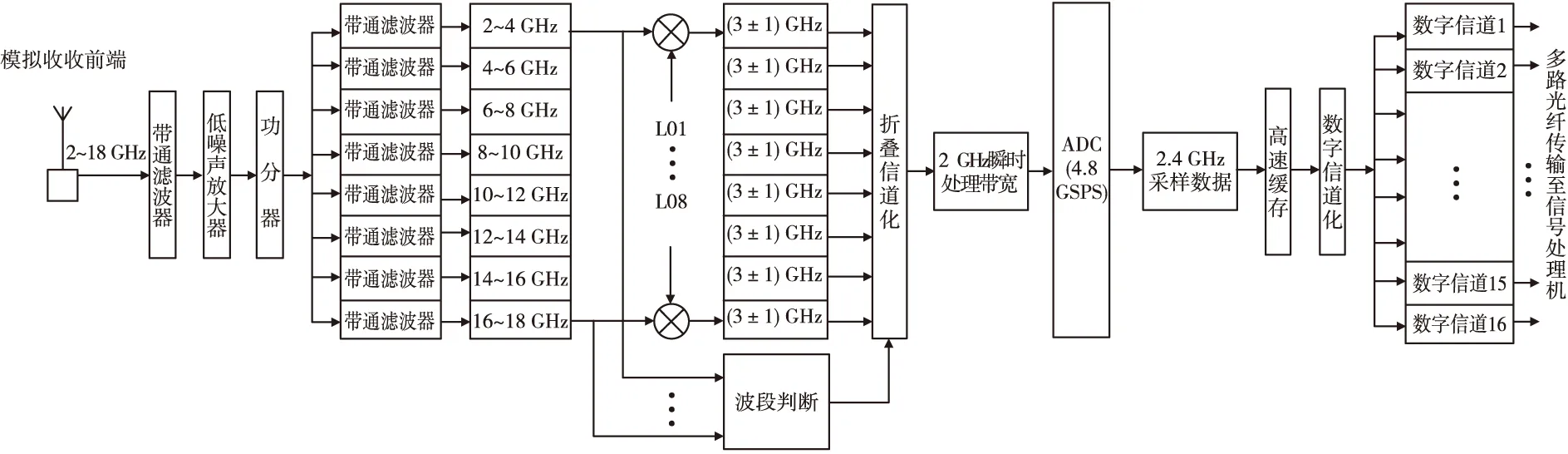
图2 折叠信道化+数字信道化侦察接收机的总体设计流程图Fig.2 System design flow chart of folded channelized + digital channelized reconnaissance receiver
3 组合架构中高速雷达信号数据流实时处理的实现及仿真
军工产品的来源很大程度上依靠商业市场,使用商用现成品(COTS)实现处理高速雷达信号数据流已经越来越普遍,与传统的军事专项定购方法相比,使用COTS开发周期快,能减少研发成本,服务器中通用处理器都有开放软件标准,制造商通常还提供对处理器进行优化的信号处理库[6]。随着异构服务器运算性能的大幅提升,软件生态环境的进一步优化、并行及低延时编译方法的逐步成熟,使得利用异构服务器完成强实时的雷达信号处理任务成为可能[7]。基于GPU+CPU异构服务器的实时分选识别,通过采用高速数据存储处理平台架构,能够实现对输入数据提供实时存储、处理。在前文论述的级联式信道化的基础上,ESM系统的信号流程图如图3所示。

图3 ESM系统信号处理流程图Fig.3 Signal processing flow chart of radar countermeasure system
为验证将异构服务器用于实现ESM系统中信号处理算法的准确度和实时性,本文主要对ESM系统信号处理的主要环节信号分选进行仿真。在充分利用前文所述的级联式信道化实现高精度测频和信号并行处理等优点的基础上,可以通过异构服务器实现软件化分选处理来提高信号分选的效率和准确性,同时考虑到实际在ESM情况下存在缺乏充足先验信息、样本空间不够大以及实时性要求难满足等客观情况,本文采用SVM分类算法进行仿真。
3.1 SVM原理
SVM是基于统计学习理论和结构风险最小化准则的一种分类器。SVM算法是一个凸二次优化问题,能够保证找到的极值解就是全局最优解,无须任何先验知识便能找到最优超平面分割面,且仅凭少量的支持向量就能表示这个最优超平面分割面,在解决小样本、非线性高维模式分选识别问题中表现出结构简单、全局最优、泛化能力强等许多特有优势[8],因此适合用于ESM系统中雷达信号的分选。
SVM是在两类线性可分问题的最优分类算法基础上发展而来的。以两类线性可分数据为例,一类数据用圆形代表,另一类数据用菱形代表,则最优分类线(在高维情况下为最优分类超平面)示例图如图4所示。

图4 最优分类线示例图Fig.4 Sample diagram of the optimal classification line
图4中margin代表分类平面间的最大分类间隔,处于分类线两侧的数据点为待分类的样本。在该示例图中,基本分类判别面方程为:
WTX+b=0
若对线性可分的样本集进行数据归一化处理,分类间隔的表达式为,求分类间隔最大问题实际上就是求最小,通过加入有效约束条件,引入拉格朗日乘子后,解得最优分类判别函数,且其参数的确定依赖于SV(支持向量),从而得到通用SVM最优化分类函数表达式:
在实际应用中,为解决SVM只能处理线性可分样本的问题,将核函数与最优分类判别面相结合形成最终的SVM模型,分类函数表达式变为:
引入核函数的主要目的是将原低维空间中非线性不可分函数映射到高维空间中,即解决低维特征空间无法构造分类超平面的问题,从而将非线性不可分的问题转化为线性可分问题,此时的最优分类算法就变成了SVM分类算法[8]。
SVM分类算法的性能关键在于核函数方法的选取,常见的核函数有线性核、p阶多项式核、多层感知器核(Sigmoid)和Gauss径向基核(RBF)[1]。本文采用基于Gauss径向基核的SVM分类算法进行信号分选的仿真分析。
3.2 算法仿真
3.2.1参数设置
用PDW(脉冲描述字)表述雷达的参数,主要包括射频(RF)、PA(脉冲幅度)、PW(脉冲宽度)、TOA(到达时间)、DOA(到达角)。2部侦察站分别部署在(±50 000,0,0),4部雷达的位置在(7 000,4 000,4 000)处随机产生,DOA不考虑俯仰,采集0.1 s的脉冲数据。分别设置3种不同复杂度的ESM工作频段中S波段的信号样式。
1) 固定载频、固定脉宽;
2) 频率捷变(捷变范围为5 MHz)、脉宽捷变(捷变范围为0.5 μs)、脉冲丢失率为10%;
3) 脉冲丢失率为20%,其余与2)中相同。
3.2.2仿真分析
对雷达全脉冲数据的各个维度进行相关性检测可知相关性最强的是RF和PW两个属性,因此选择利用这两个属性来进行分选。由于Matlab中的SVM只用于二分类,因此针对四部雷达的分类问题需要通过多个SVM的组合来完成,训练出四个分类器,测试数据时取匹配概率最大的分类结果。
把坐标上的每一个点都载入模型得到对应的分类预测,仿真中在SNR为40 dB相对较高信噪比环境下来训练SVM模型,这样就可以画出本次分类器训练出的分类范围,此时分选准确率为100%,如图5所示。

图5 较高信噪比环境下SVM训练出的分类范围Fig.5 Classification regions trained by SVM classification algorithm under a higher SNR
实际情况下噪声干扰影响可能较大,因此在仿真中将SNR降到20 dB相对较低信噪比,此时使用SVM分类算法分离信号,仿真结果如图6所示。此时下方两个较为密集的结合部分信号分选效果稍差,但总体效果较好,此时分选准确率为98.67%,仍可满足ESM系统雷达信号分选的要求。

图6 较低信噪比环境下SVM训练出的分类范围Fig.6 Classification regions trained by SVM classification algorithm under a lower SNR
为了提高算法的实时性,除了对代码进行优化、向量化编程等手段外,还可以通过CPU+GPU异构加快Matlab代码的运行速度,表4将使用通用CPU与CPU+GPU异构服务器实现SVM分类算法的处理时间进行了对比。

表4 通用CPU与CPU+GPU异构服务器实现SVM分类算法的处理时间对比Tab.4 Comparison table of processing time of SVM classification algorithm implemented by general CPU and CPU+GPU heterogeneous server
通过对比可以看出,使用异构服务器架构能够较快加速SVM分类算法的实现,从而满足ESM中信号实时分选要求。本文仿真选择了实时性强、无需先验条件且在较低SNR环境下仍能够确保高分选准确率的SVM分类算法,在实际系统设计中,可以根据具体需求和环境选择不同的算法,特别是在需要实现维度高、迭代次数多、样本空间大、在线可编程的雷达侦察信号分选算法时,利用该架构能够加速算法的实现,而在传统的FPGA、DSP等处理器上是无法实现的,在通用上能够实现但实时性较差,因此目前在一些最新的雷达对抗平台中已经开始采用CPU+GPU异构服务器来实现信号的处理。
通过前文对侦察接收和信号处理两个模块的设计论证和算法的仿真分析可以看出:级联式信道化能够实现对雷达侦察信号的全概率截获和高精度测频并完成信号的实时传输,为下一步信号高准确率分选奠定了基础,从而应对日渐增多的低截获概率(LPI)雷达的威胁;但也带来了大吞吐量高速数据流实时处理的挑战,此时便可以利用异构服务器特有的性能优势,在提高信号处理的速度同时,对复杂交错宽带雷达侦察信号的大吞吐量高速数据流进行实时的数字化、可编程分选,从而达到快速侦察并精准引导干扰的目的。因此,级联式信道化和异构服务器前呼后应、取长补短,从而发挥该ESM系统组合架构优势。
4 结论
本文提出并论证了一种级联式信道化和异构服务器ESM系统组合架构,该架构将级联式信道化和异构服务器进行组合搭配、优势互补。基于该架构用Matlab对SVM分类算法进行仿真,仿真结果表明:该架构能够在全概率截获、高精度测频、实时性传输和简化工程设计的基础上,实现对复杂交错宽带雷达侦察信号的实时可编程分选;即使在某些情况下不满足ESM雷达侦察信号处理的强实时性要求,仍然可以在该组合架构的基础上用先进但又复杂的算法来实现ELINT(电子情报侦察)。该设计思想契合了智能雷达对抗的发展趋势,在雷达对抗领域具有一定的研究意义和应用前景。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
导航定位学报(2022年5期)2022-10-13
军民两用技术与产品(2022年7期)2022-08-06
计算技术与自动化(2022年2期)2022-07-04
包装工程(2022年9期)2022-05-13
小学教学研究(2022年5期)2022-04-28
导航定位学报(2022年1期)2022-02-17
中国电气工程学报(2019年18期)2019-10-21
福建基础教育研究(2019年11期)2019-05-28
