高空作业车臂架结构优化设计研究
2020-11-06 00:04关彩明
中国电气工程学报 2020年10期
关彩明
摘要:伸缩臂是汽车工作装置的主要组成部分,它直接影响到汽车的作业性能。以臂架重量的最小化作为调整的最优目标,以强度和刚度等相关条件作为约束条件,创建出调整后的数学模型,从而得出最理想的截面类型。研究调查显示,经调整后的臂架最大应力、以及质量等参数均有所降低,在增强臂架综合性能指标的水平之上,完成了减轻自重的初步目标,期望能对作业车的臂架内部结构的设计工作带来些许参考价值。
关键词:高空作业;结构优化;臂架
臂架的综合性能将极大地影响到汽车的作业效率。伸缩臂的质量在整个作业车的质量中占有很大的比例。若目前吊臂存在重量过大的现象,则会进一步地影响工作效率的问题。所以,在保证工作强度以及工作刚度的基础之下,要不断地对臂架结构进行调整与优化,用以提高臂架的自身性能。并创建臂架的具体化数学模型,通过部分软件实现对臂架截面的尺寸等参数进行调整与优化。
一、高空作业车臂架结构截面形式
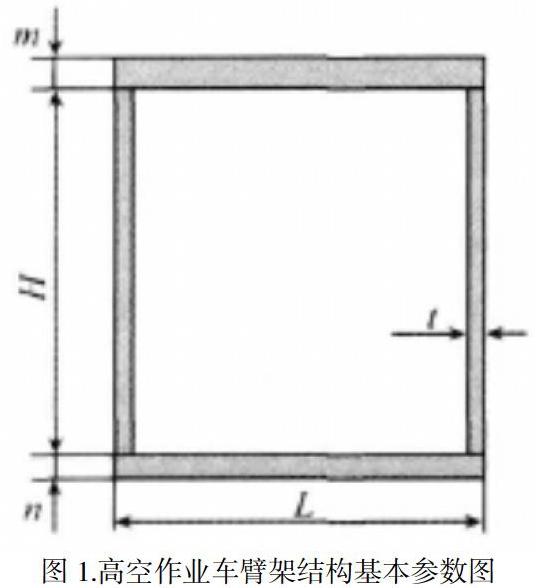
对高空作业车臂架结构的截面形式的优化与调整是截面优化的关键步骤,其可以在增强高空作业车臂架结构的综合能力的基础之上,进一步地减小其臂架自身的质量,最大程度上地节省所用原材料,降低作业成本。高空作业车臂架结构的基本参数如图1所示,由图可得,高空作业车的臂架横截面的主要形式为矩形,其中,m、n分别为上、下盖板的厚度大小,L为作业车臂架的上下盖板宽度的大小,t为盖板的厚度大小,H则为盖板的高度大小,此五类信息为高空作业车臂架结构的主要参数。
二、高空作业车臂架结构的有限元类分析
优化前,必须对臂架进行有限元分析。在DM模块中创建了臂架结构的具体化数学模型[1]。起重机的最大的工作载荷施加在臂座的上端面之中。其方向是Y轴的负方向。在臂架侧面施加120帕的风荷载,在臂架上施加等效重量的筒体、管道等部件。u,ur的平移自由度。U2和旋转的两个方向。转子被约束在气缸和基本臂的铰链连接处,并释放其绕Z轴的转动方向的自由度。并且在其他关节处增添相同的约束条件,通过静力分析得到相对应的应力云图以及应变云图。
三、高空作业车臂架结构的调整与优化
(一)敏感度响应分析
在实际中完成实验设计法时会显示二十七个调整后的样本,其调整的主要程序包括:开始→建立模型→静力分析→实验点设计→敏感度分析→最优化设计→是否达到研究目的→是→结论。若选用以神经网络为基础的分析系统进行调整与优化,则可以获得相对应的响应曲面。经研究可知,对吊臂的最大应力产生影响最大的是腹板的高度以及盖板的宽度。对吊臂的重量参数产生影响最大的是盖板的宽度,对吊臂的最大形变产生影响最大的是腹板的高度。
(二)以遗传算法为基础的多方位调整方法分析
采用以遗传算法为基础的多方位调整方法进行实际的调整工作。以遗传算法为基础的多方位调整方法是在概率统计算法基础之上的一种搜索方法,其对于离散变量的调整与计算具有较高的适用度[2]。在此基础上,选择多目标的遗传算法进行实际的调整,则会获得若干组待选点。在针对各个待选点进行实际比较之后,选择最优化的目标,将设计数据导入至其中,并更新算法结果。则可得出其在进行调整前后的质量、等效应力的具体优化程度。由研究调查得,吊臂最大的效力为六十三兆帕,其在原有的基础上减小了十一兆帕,具体优化的比例为百分之十五。最大变形量为十五毫米,其在原有的基础上减小了零点五毫米,具体优化的比例为百分之三。吊臂最大重量为为五百一十千克,其在原有的基础上减小了五十千克,具体优化的比例为百分之九。
四、功能实现
(一)工作平台的自动调整
根据作业平台的内置角度的传感器来调平工作平台,作业平台的倾斜角度是实时进行测量的,然后将其输入到调频控制器当中。接下来再依据倾斜角度来控制调平控制器的调平比例阀动作,使得平台恢复到正常的水平状态,然后采用闭环控制来进行调平[3]。
为了能够使得作业平台的安全性得到保障,调平控制装置的安全性措施有以下几个方面。
(1)调频控制器有自己的规定时间,嗯,比如说每隔20ms就會通过CAN通讯,给主控制器传达状态信息,在规定的时间之内,如果主控制器没有接受调频控制器的状态信息,那么主控制器将会把所有的动作自动断开,蜂鸣器发出声音,报警灯闪烁,一直到恢复到正常状态。
(2)主控制器也会有自己的规定时间,比如说在每隔20ms就会得到倾斜的角度的数据,这个数据是由调频控制器测量到的。一旦倾斜的角度小于-10度或者是大于+10度时,那么主控制器将会把所有的动作都断开,蜂鸣器会发出声响,报警灯也会闪烁,一直到恢复到正常状态[4]。
(3)调平比例阀也有自己的机械操作手柄,在出现危急情况时,可以用手动来调平操作。
(二)安全保护
1)动作互锁
支腿没有得到支撑前,臂会处于一个锁定的状态,支腿得到支撑之后,自动会把臂的锁定解除,如果臂一旦远离臂的支架,那么支腿就会自己处在一个锁定的情形,然后就不能在进行操作了,在完成工作之后,臂支架的臂就会自动回缩,然后支腿的锁定也会自己解除掉,接下来在完成支腿的操作。在特殊的情况下,会设置一个解锁的开关[5]。
2)防倾倒保护
因为车辆其自身的工作区域较大,其在进行实际操作之前必须要完成对安全作业范围的划定工作,并且精确地求出具体范围,从而避免在车辆在进行实际作业过程中出现倾倒的问题。可以利用PLC技术进行程序控制,当技术工作人员进行有可能发生倾倒的操作时,对此动作进行拒绝响应,并且及时提醒操作人员此安全隐患问题,在操作人员完成降低安全隐患系数的操作时,完成响应操作,此时,可以确保倾倒问题尽可能小几率的发生,从而进一步地避免操作人员发生误触等操作失误的问题。
结语:本篇文章是根据复杂混合臂架结构高空作业车的一些特点,比如说:处理量很大、数据信息采集很多以及逻辑关系很复杂的特点。根据这种提出了一种控制系统的设计形式,这种形式是以CAN-BUS控制总线以及智能控制系统为基本,让作业平台的动作更加的灵敏、平稳,让作业平台的运动轨迹以及工作状态都实现了智能化的控制,使得作业效率有了更明显的提高,并且还保障了作业的可靠性以及安全性,给和他相似的车辆,特别是给复杂结构高空作业车的开发提供了很好的借鉴。
参考文献
[1]刘志,纪爱敏,张磊,王豪,赵仲航.剪叉式高空作业平台上车液压系统的稳定性研究[J].机电工程,2020,37(06):600-606.
[2]董洪月,张泽华,闫晓玲.履带式高空作业车行走液压系统的设计[J].液压气动与密封,2020,40(04):5-7.
[3]李前进,张胜利,王志勇,姜文光.高空作业车臂架轻量化设计与改进[J].建筑机械化,2019,40(03):21-23.
[4]夏林焱. 高空作业车臂架优化设计及多体动力学分析[D].中南林业科技大学,2018.
[5]李向良. 折叠式高空作业车臂架结构仿真分析与优化设计[D].河北工程大学,2018.
猜你喜欢
信息化建设(2021年1期)2021-05-20
学苑创造·C版(2020年12期)2020-01-04
工业设计(2019年4期)2019-06-11
科学与财富(2016年34期)2017-03-23
科技视界(2016年18期)2016-11-03
中国市场(2016年33期)2016-10-18
中国市场(2016年33期)2016-10-18
商业经济研究(2016年14期)2016-09-14
股市动态分析(2016年30期)2016-08-15
环球时报(2009-11-23)2009-11-23