
基于COMSOL 的主动式声诱饵仿真系统
2020-11-10 02:09唐丽媛汪海涛
水下无人系统学报 2020年5期
唐丽媛,汪海涛,王 斌
(1.上海交通大学 海洋工程国家重点实验室,上海,200240;2.哈尔滨工程大学 水声技术重点实验室,黑龙江 哈尔滨,150001;3.中国船舶重工集团公司 第726 研究所,上海,201108)
0 引言
目前反鱼雷技术主要集中在自我保护和软杀伤2 个方面。其中声诱饵是各国海军广泛采用的武器装备之一[1-2]。
声诱饵按工作方式分为主动式和被动式2 种,主动式声诱饵通过模拟潜艇的散射特性应答敌方的搜寻信号;被动式声诱饵通过连续发出与潜艇辐射噪声相似的宽带噪声,达到诱骗敌方声呐的目的[3]。声诱饵按运动方式分为拖拽式、自航式和悬浮式,悬浮式声诱饵由共轴的发射阵、接收阵、声障板以及电子舱组成,其中,电子舱为耐压壳体结构,用于连接发射接收装置,储存参与工作的电子设备[4]。
为了对抗智能化鱼雷,现代主动式声诱饵通常采用边收边发工作模式[5],即发射信号的同时不关闭接收机,该技术的关键在于降低发射信号串漏对接收信号的影响。向大威等[6]指出边收边发模式下声串漏是由发射-接收端直接声串漏和海底/海面反射引起的间接声串漏两部分组成。王自娟[7]、王守义[5]讨论了利用矢量传感器的组合指向性抑制声串漏。吴培荣[8]分析了发射/接收的指向性和干扰抵消算法对声串漏的抑制效果。王敏慧等[9]定量分析了圆柱换能器轴向波束随声障板安装距离和直径的变化。徐盛瀛等[10]讨论了声诱饵电子舱材料、结构及其与发射点距离对接收隔离度的影响。上述研究对声诱饵串漏抑制具有重要的指导意义,但不具备系统仿真分析能力。
董阳泽[11]、苑秉成等[12]基于Matlab、VC 平台研制了声诱饵仿真系统。董阳泽等[13]对水声对抗仿真系统的设计思路和具体的实施方案进行了阐述。以上仿真系统的重点为声诱饵的防御策略,对阵元域信号仿真关注较少。
针对以上问题,文中设计了一套边收边发工作模式的主动式声诱饵仿真系统。该系统借助多物理场耦合数值仿真软件COMSOL Multiphysics仿真电子舱声振耦合的声场,将串漏反馈模型和时域波形仿真等算法通过其内置的APP 开发器在不同的模块中实现,完成了阵元域接收/发射信号完整仿真流程;同时,提供了包括模拟潜艇回波功能的信号处理模块,可以对信号进行分析;采用模块化设计,独立性高。最后分析了电子舱引起的发射/接收声场畸变以及边收边发模式下串漏引起的器材增益变化。
1 仿真原理与系统构成
1.1 仿真原理
主动式声诱饵工作原理如图1 所示。

图1 声诱饵工作原理图Fig.1 Principle of acoustic bait
由主动声呐发射探测信号,经过海洋信道传播至声诱饵,接收阵将入射声波及其在声隔离障板和电子舱上的散射声波一同转换为电信号,经接收机、信号处理机以及发射机滤波、放大,驱动发射基阵将电信号转换为声波,与接收过程类似发射声波在声隔离障板和电子舱上发生散射,经过海洋信道传播至主动声呐。
将包含声隔离障板和电子舱散射的海洋信道声传播作为一个线性系统考虑,并根据Ignenito近似[14]忽略声诱饵与海面/海底之间多次散射,声诱饵接收阵输出电压信号可表示为

式中:S(ω)为主动声呐发射信号频谱;θi、G(θi)和φ(θi)分别为本征声线入射角、幅度和相位;H1(ω,θi)为θi方向单位幅度平面波激励自由场环境下声诱饵接收阵输出复电压;n(t)为海洋环境噪声激励下输出电压。
主动声呐接收应答信号可表示为

式中:Z(ω)为输出机输出电压频谱;H2(ω,θ i)为自由场环境下单位电压激励下声诱饵接发射阵在θi方向和距离归一化后的复声压。
传统存储转发模式时,输出机输出电压z(t)与接收机输入电压y(t)的频谱满足

其中,H(ω)为存储转发模式下声诱饵接收机输入电压与发射机输出电压之间的传递函数,为已知量。
在边收边发工作模式下,发射阵发射信号经接收阵接收后同时转发,形成一个典型反馈闭环系统[15],如图2 所示。

图2 串漏反馈模型Fig.2 Model of cross-leak feedback
此时接收机输入电压与发射机输出电压之间传递函数由H(ω)变为

其中,H3(ω)为自由场环境单位声压驱动下发射阵发射声波时接收阵输出电压的传递函数。
由此可知声诱饵阵元域信号仿真流程如下:1) 根据海洋环境参数、主动声呐/声诱饵深度和水平距离计算本征声线入射角、幅度与相位;2) 根据声隔离障板、电子舱结构与材料参数以及发射/接收阵配置参数(形状、尺度以及压电响应或灵敏度)计算传递函数;3) 根据接收机输入电压与发射机输出电压之间的传递函数,计算接收机输入电压以及发射阵应答信号时域波形。
1.2 系统构成
针对上述仿真流程,该系统采用了模块化设计,模块间采用共享文件的方式通信。系统结构如图3 所示。

图3 系统结构Fig.3 System structure
各模块具体功能如下。
1) 模型构建模块: 具备丰富的CAD 接口,支持用户导入待计算的声诱饵模型,并同时展示该模型二维剖面图和三维立体图,输出二维模型。
2) 海洋环境模块: 用于生成主动声呐信号和模拟海洋信道多途效应、背景噪声和混响。基于射线声学计算主动声呐与声诱饵之间的本征声线入射角、幅度和相位,同时根据Wenz 谱[16]和单元散射模型[17]模拟海洋环境噪声和混响时域波形。
3) 声学有限元模块: 根据海洋环境模块输出的本征声线入射角,计算自由场情况下各个角度声波入射时考虑诱饵电子舱的声场传递函数,包含发射、接收和串漏传递函数。为了提高计算速度,系统采用了基于轴向谐波展开的有限元方法[18]计算传递函数,计算速度与效率相对于三维有限元方法具有显著优势[18]。
4) 接收机模块: 根据海洋环境模块和声学有限元模块计算得到的本征声线和传递函数,应用式(1)计算接收机输入电压时域波形。
5) 发射机模块: 根据海洋环境模块和声学有限元模块计算得到的本征声线和传递函数,结合式(2)、式(3)和式(5)计算存储转发和边收边发2种模式下的主动声呐应答信号时域波形。
6) 信号处理模块: 对仿真设计的效果进行评估,具体通过对式(5)计算得到的应答信号进行信号处理和与模拟潜艇回波对比进行评估。信号处理部分采用较为成熟的频谱分析,匹配滤波和包络检测以及时频分析方法处理声呐应答信号。
模拟潜艇回波部分,设包含潜艇目标散射声场传递函数为Hv,则模拟潜艇的回波为

由于通常要模拟的潜艇等目标尺寸很大,主要为几何回波,若采用有限元软件计算,对计算机的要求很高,计算速度较慢,因此采用板块元方法[19]快速计算Hv,即

其中,αij是第(i,j)个板块元的法向与入射和反射方向的夹角。
2 仿真系统实现
2.1 硬件与平台配置
2.1.1 集群系统硬件资源
该系统配置集群系统包含4 台曙光C500-3K刀片服务器,每台服务器配置2 个型号为Intel(R)Xeon(R) CPU E5-2695 v4@2.10 GHz 的处理器,每个处理器核心数为18 个。服务器内存128 GB。数据均置于本地硬盘中存储,其中3 个节点的容量为2 479 GB,第4 个节点容量为479 GB。各节点通过千兆有线局域网连接,通过作业配置调度程序PBS (portable batch system)实现仿真计算程序的协同处理。
2.1.2 集群软件配置
各节点安装的操作系统为Linux,其中节点1为主节点,安装的软件为COMSOL Server 5.3a。
COMSOL Server 是由COMSOL 公司开发的专业平台[20],用于部署和运行已构建好的仿真模块,界面内置多种管理工具,可以管理已上传APP 的访问权限、用户帐户、用户组以及多处理器的使用情况等。通过COMSOL Server 内置的集群计算技术部署各模块,使其能够在集群架构中运行。系统主界面如图4 所示。

图4 系统主界面Fig.4 Main system interface
2.1.3 模块开发方法
各模块均采用COMSOL Multiphysics 内置的APP 开发器进行开发。APP 开发器不仅可以通过运行方法对有限元仿真进行控制,还支持嵌入算法、定制APP 的界面、控制输入和输出等操作。
该系统使用Java 语言在APP 开发器中实现。首先,将常用的数据处理算法如插值函数、快速傅立叶变换等采用面向对象的方式封装成应用程序接口(application programming interface,API),然后在方法中进行API 调用,最后设计界面。通过按钮关联方法,得到具有特定功能的模块,各模块通过维护公共的文件进行信息传递。
2.2 参数设计与界面显示
1) 海洋环境模块
具体设置如图5 所示。左侧为海洋环境参数设置部分,包含主动声呐发射信号、发射指向性、海洋噪声谱以及信道参数等;右侧为图形展示部分,结果图分别为主动声呐发射信号、海洋环境噪声信号和海洋混响信号。
2) 声学有限元模块
具体设置如图6 所示。左侧为参数设置部分,主要包含导入电子舱计算模型,发射接收阵阵元类型、位置及灵敏度,各区域材料以及计算频率范围等;右侧为图形展示部分,其中,第1 列为计算模型和计算后声场,第2 列3 幅图分别为考虑电子舱时的接收传递函数、发射传递函数和串漏传递函数的结果。
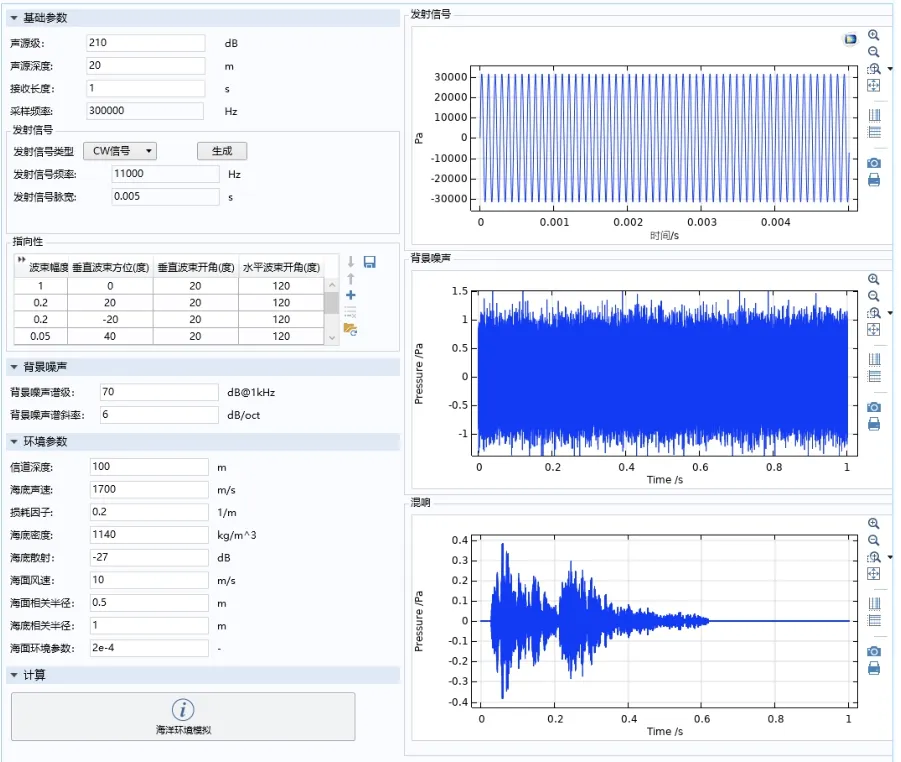
图5 海洋环境模块Fig.5 Marine environment module

图6 声学有限元模块Fig.6 Acoustic finite element module
3) 接收机模块
具体设置如图7 所示。左侧参数设置包含接收机增益、滤波器设置、傅里叶点数以及相关共享文件名;右侧图形展示部分分别为滤波器频谱和接收阵输出电压信号。

图7 接收机模块Fig.7 Receiver module
4) 发射机模块
具体设置如图8 所示。左侧参数设置包含发射机增益、卷积函数文件导入以及相关共享文件名;右侧为图形展示部分,第1 行分别为转发信号时域和频域图,第2 行分别为存储转发模式和实时转发模式主动声呐接收信号。

图8 发射机模块Fig.8 Transmitter module
5) 信号处理模块
具体设置如图9 所示。左侧参数设置包含待分析信号k(t)、参考信号s(t) 和待计算潜艇模型文件,并设置相关配置文件;右侧第1 列图分别为待分析信号、参考信号和分析信号时域波形,第2 列分别为时频分析、包络检测和匹配滤波结果,第3 列分别为被模拟目标模型、目标强度和模拟回波。

图9 信号处理模块Fig.9 Signal processing module
2.3 精度与性能测试
2.3.1 精度测试
计算考虑诱饵电子舱散射对接收/转发声场影响的传递函数是该系统的关键。球壳和有限长柱壳均具有解析解,但对于有限长柱壳仿真时需要增加无限长的障板,无法计算轴向声场,因此该部分采用具有理论解的球壳电子舱进行验证。
应用弹性理论推导点源激励下球壳散射声场在柱坐标系下可表示为[21]

球壳电子舱参数为: 半径0.2 m,厚度0.02 m,设置材料密度为,泊松比0.3,杨氏模量设置为复数210×(1+0.01i) GPa。分析频段为7~15 kHz,发射阵和接收阵均为三元点源阵列,间距为3 cm。各发射阵元发送电压响应均为120 dB,各阵元接收灵敏度均为-120 dB。两阵中心分别位于电子舱上方0.78 m 和0.08 m 处。
将诱饵电子舱存在时水平方位的接收、发射传递函数和串漏传递函数与理论解对比,如图10所示,可见总体吻合较好。

图10 弹性球壳散射声场传递函数随频率变化曲线Fig.10 Curves of transfer function of acoustic field scattered by elastic spherical shell versus frequency
2.3.2 性能测试
为测试仿真平台的稳定性和可行性,对平台进行多次仿真运行。测试主要在2.1 节所介绍的硬件系统下完成。测试采用动态测试方法,即所有模块均被执行1 次。测试所用模型为球冠圆柱壳,具体参数见3.1 节,完成1 次测试所用时间定义为1 次仿真时间。
测试结果如表1 所示,仿真平台运行良好,操作时运行流畅,时间可控。对比1、3、4 结果可知,频率提高时网格数量增多,运行时间随之增长;对比1、2 结果可知,相同网格时,运行时间和频点数呈非线性正相关,这是由于1 次运算只需要1 次节点任务分配和组装时间,计算规模越大计算效率越高。

表1 系统仿真测试结果Table 1 System simulation test results
3 仿真分析
3.1 电子舱散射声场对传递函数影响分析
设置导入球冠圆柱壳形电子舱总长1.2 m、半径0.2 m、壳厚0.02 m、壳体材料为钢材料、密度、泊松比0.3、杨氏模量210 GPa。设置敌方距离2 km,水平深度相同,均匀声速梯度,直达声波入射角0°。计算频段为7~15 kHz。发射阵和接收阵配置同2.3 节。
图11 给出了考虑/忽略电子舱2 种情况下发射、接收传递函数随频率的变化规律。从图中可以看出,在压电响应或灵敏度随频率不变的假设条件下,忽略电子舱时,水平方位发射/接收传递函数不随频率变化;考虑电子舱时,由于电子舱壳体的散射作用,水平方位发射/接收传递函数随着频率快速起伏。相比于接收阵,发射阵距离电子舱更远,因此发射传递函数起伏程度较接收传递函数弱。尽管发射/接收阵处于电子舱同一端,但2 个传递函数随频率起伏的趋势不同步,这是由于近场散射声场特性造成的。

图11 球冠圆柱电子舱散射声场传递函数随频率变化曲线Fig.11 Curves of transfer function of acoustic field scattered by spherical crown cylinder electronic cabin versus frequency
图12 给出了考虑/忽略电子舱2 种情况下串漏传递函数幅度和相位随频率的变化规律。从图中可以看出,忽略电子舱时,串漏函数随着频率提高而单调降低,当电子舱存在时,串漏函数随频率变化起伏程度明显高于水平方位发射/接收指向性,这是由于发射/接收阵轴向空间滤波能力不足造成的,尤其是低频情况。
综上所述,电子舱对发射、接收以及串漏传递函数的影响是不容忽视的。仿真时可以通过在发射-接收阵之间加入障板、增大发射-接收阵和电子舱的距离以及更改电子舱的结构和材料等方法降低电子舱的影响,具体方法文中不予讨论。
3.2 边收边发模式器材增益分析
根据式(4)计算的边收边发模式和存储转发模式下接收机输入电压与发射机输出电压之间传递函数比值为

其中,H(ω)相位设为0。上式结果幅值即有无反馈系统增益比如图13 所示。
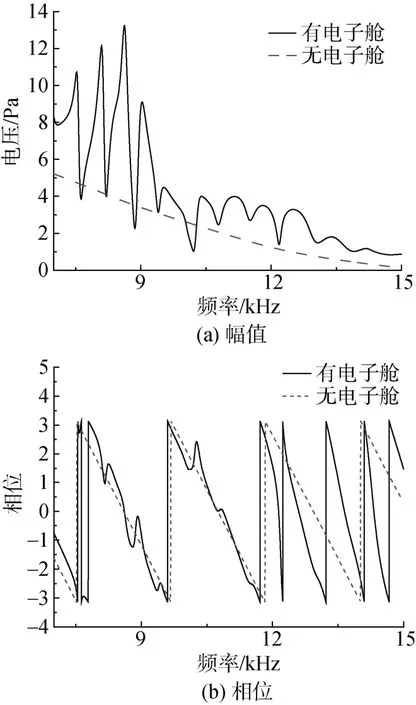
图12 串漏传递函数随频率变化曲线Fig.12 Curves of cross-leak transfer function versus frequency

图13 边收边发工作模式下系统增益比Fig.13 Gain ratio of system in receiving and sending mode
从图中可以看出,频率不同时,边收边发模式系统反馈方式不定。当H(ω)H3(ω)远大于1时,系统增益减弱,呈负反馈;当H(ω)H3(ω)幅值接近1、相位接近 -π时,系统增益变得非常大,易引起系统自激;H(ω)H3(ω)越接近0,系统增益受串漏影响越小。无论是负反馈还是正反馈均会降低声诱饵器材的稳定性,影响诱骗性能。因此在实际工程中,采取声隔离措施时需要充分考虑串漏函数的影响并对其有效隔离。
4 结束语
文中利用COMSOL 软件仿真定制的特点和强大的部署能力,设计了一套基于COMSOL 的主动式声诱饵仿真系统,为考虑电子舱声振耦合作用边收边发工作模式的声诱饵器材性能提供了一个仿真平台。该系统可快速仿真存储转发和边收边发2 种情况下的回波,同时兼具信号处理和仿真目标回波的功能,用户可通过仿真结果评估设计器材的性能。该系统将各部分功能模块化,独立性高,界面简洁,便于非研发人员操作,部署在集群上,计算速度快。经测试,该系统运行流畅,运行时间可控,为声诱饵的性能研究提供了一个可靠的预评估系统。同时仿真并分析了电子舱对传递函数的影响,以及边收边发工作模式下器材的增益变化,实际工程中,需采用必要的隔离措施降低电子舱以及声串漏的影响。
目前该系统中的仿真算法均较基础,下一步将在各个模块中增加用户导入自定义Matlab 处理程序的功能,以实现用户定制化仿真。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
舰船科学技术(2022年11期)2022-07-15
灌溉排水学报(2022年6期)2022-07-13
兵工学报(2021年4期)2021-06-19
科技创新与应用(2017年16期)2017-06-10
艺术科技(2016年11期)2017-05-05
演艺科技(2017年1期)2017-03-09
现代兵器(2016年12期)2016-12-22
现代兵器(2016年12期)2016-12-22
戏剧之家(2016年12期)2016-06-30
