矿山胶带运输智能巡检机器人的探索与应用
2020-11-18 07:38徐晋伟
矿业工程 2020年4期
徐晋伟
(临汾煤炭工业地方煤矿建设工程质量检验(站)有限公司,山西 临汾 041000)
0 引言
矿山安全巡检工作是保证矿山开采安全的重点工作之一,其主要的检查内容包括排水系统、开采系统、电力问题、矿内外环境等[1]。安全巡检工作不仅需要安全巡检人员每天定时开展巡检工作,还要投入大量的时间和物力,以确保对整个矿山运行情况的全面检查和掌握。当前,人工巡检方式存在工作量大、效率低、过分依赖巡检人员经验以及人力资源浪费等问题[2-4]。随着技术的进步和矿山等高危行业要求的提高,智能巡检机器人来代替人工巡检,可实现直观可视化的管理,对降低劳动强度、提高矿山管理水平、推动矿山工作管理模式向数字化以及现代化方向发展,确保矿山的安全生产具有重要意义。
当前,矿用胶带机巡检机器人的研究虽然仍不成熟,但随着人力成本不断增大、国家“智能制造”战略以及“安全矿山”方针的提出,对巡检机器人研究的完善起着重要的推动作用。
1 矿山应用要求及智能巡检机器人结构
1.1 矿山复杂性及应用要求
鉴于矿山胶带工作环境的特殊性和复杂性,胶带巡检机器人需要满足诸多条件。工作环境湿度大,需要考虑湿度对胶带机智能巡检机器人的精度和稳定性存在的影响[5];大型机电设备附近存在电磁和射频干扰,要求智能巡检机器人系统具备较强的抗干扰能力;工作空间具有长度大、起伏转弯且空间狭小等特点,这都对胶带机巡检机器人的行走速度、最大行走距离、爬坡能力、转弯半径、控制方式提出很高的要求[6]。运输廊道巡检还要求具有一定的智能性和强大的监控功能,包括对机电设备温度监控、气体浓度监控、视频监控等功能[7]。胶带机巡检机器人为保证安全,应具备充电闭锁功能[8]。胶带机巡检机器人具备的环境检测分析、声音采集及双向对讲、本体自检、远程控制等功能进行检测。同时应具备通过强大的远程监控平台,实现环境与设备不间断的移动监控监测、应急火灾报警与处置的功能。
1.2 巡检机器人结构
为实现上述功能,巡检机器人设计有驱动系统、图像采集系统、语音对讲及应急广播系统、环境检测系统、智能防撞与避障系统等。
1)驱动系统
由于洗选厂胶带廊道内地形复杂,巡检机器人运行轨道存在转弯、上下坡等情况,为了使巡检机器人在各种情况下都能平稳行走,需要有较好适应能力的行走结构。因此,优选在固定的上部轨道上行走的方式进行巡检。
2)图集采集系统
图像采集系统搭载一体化高性能云台,红外热成像及可见光摄像机参数如表1所示。
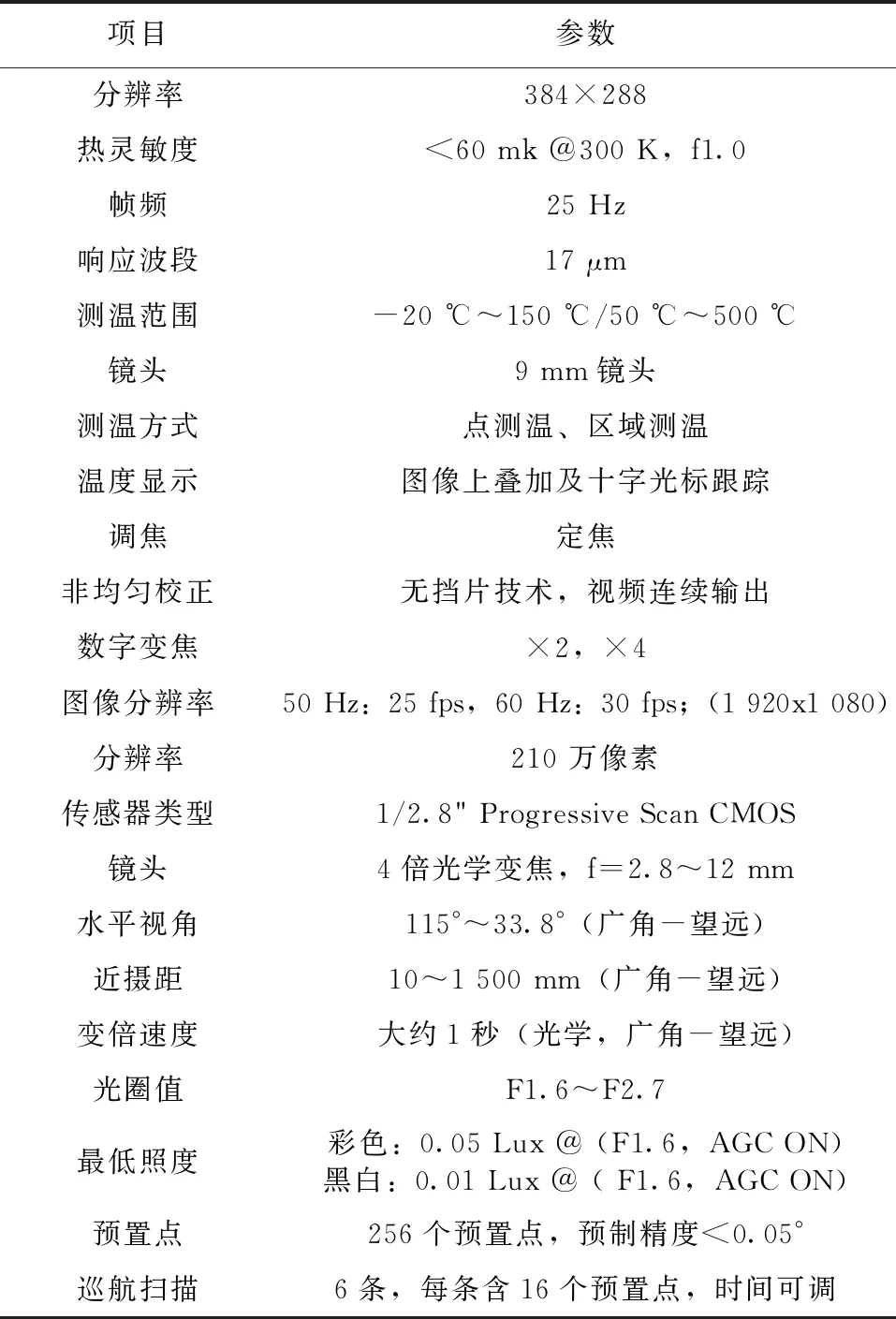
表1 图像采集系统参数表
3)语音对讲及应急广播系统
根据使用要求,巡检机器人需具备语音监听能力,监听范围为5~80 m2,且灵敏度可调,输出阻抗为600 ~1 000 Ω,在1 m距离40 dB音源情况下,信噪比为85 dB,接收频率范围为20~25 kHz。
4)环境检测系统
环境检测系统具备气体检测、温湿度检测、烟雾检测、光照度检测和火焰探测功能。对于矿山特殊工作环境来说,气体检测尤为重要。巡检机器人检测实现了四种气体高浓度连续检测,可实现超限报警,气体检测范围及分辨率等,详见表2。

表2 气体检测指标表
温湿度检测的测量范围为温度-40 ℃~+123.8 ℃,湿度 0%~100% RH ,温度和湿度的测量精度分别为±0.5 ℃和±4.5% RH @25 ℃。烟雾检测灵敏度为0.5 dB/m(±0.1 dB/m)。光照度检测的测量范围0~65 535 lux,并且可按照不同光照场景进行智能调整,具体为:黑夜时为0.001~0.02 lux;月夜时为0.02~0.3 lux;阴天室内时为:5~50 lux;阴天室外时为:50~500 lux;晴天室内时为:100~1 000 lux。火焰探测也尤为重要,火焰探测采用检测紫外线波长(185~260 nm)的紫外光辐射探测器,检测参数如表3所示。

表3 火焰探测参数指标表
5)智能防撞与避障系统
巡检机器人具有智能防撞、避障功能,对障碍物和隧道内工作人员进行探测,遇到障碍自动停止并报警,同时加装安全触边,防止碰撞造成人员及设备损伤。探测距离0~3 m,探测角度120°。设置有断电动功能,当巡检机器人在运行过程中,如遇故障断电,巡检机器人立即停止。
2 现场应用及效果
2.1 现场应用
通过矿山的现场工业性试验,胶带机巡检机器人满足胶带机运输安全监控的实际需求,系统运行状况良好,监测性能稳定可靠,故障识别能力强,报警及时且信息准确可信。胶带机巡检机器人实现了直观可视化的管理。通过胶带机管理系统的建设,实现巡检可视化、一键智能巡检、智能报警。图1和图2给出了胶带机巡检机器人系统能实时调取现场画面及实时设备运行参数等,并在视频监控的同时,在右上角实时显示红外摄像机监控图像并显示最高温度。

图1 胶带机巡检机器人现场监控画面

图2 胶带机巡检机器人功能设置界面图
由图2可知,胶带机巡检机器人可通过操作界面实现实时监控、历史数据、参数设置等功能,实现对巡检机器人的远程控制,实现远程在线监测与现场巡检相结合,在胶带廊道内打造无人巡视与处置管理新模式。
2.2 应用效果
在保证安全和生产稳定的前提下,实现自动化减人的目标。原人员定额为85人,胶带机巡检机器人应用后人员定额为25人,年节约资金500 万元以上。胶带机巡检机器人提高了自动化程度和故障处理效率,大幅降低工人的劳动强度和事故带来的损失,取得了良好的技术经济效益。
3 结语
1)智能巡检机器人可以通过各种传感器对设备、作业空间环境等基础数据进行搜集,并充分发挥山东能源临矿集团大数据分析中心优势,利用大数据算法及时掌握和判断设备的运行状况,实现了设备性能的充分利用。
2)胶带机智能巡检机器人可以实现对胶带机廊道工作环境和设备的全方位监测,实现可视化管理和实施预警,提升了巡检效率和准确性。进一步通过机器人和技术人员的联动互馈,实现对异常情况的及时处理,大幅度提高了效率。
3)胶带机巡检机器人的应用实现自动化减人的目标,降低了成本,提高了自动化程度和故障处理效率,取得了良好的技术经济效益。
猜你喜欢
煤炭与化工(2022年2期)2022-04-14
疯狂英语·新读写(2021年10期)2021-12-07
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
成都信息工程大学学报(2021年2期)2021-07-22
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
山东工业技术(2016年24期)2017-01-12
体育科研(2014年5期)2014-04-16
体育师友(2010年6期)2010-03-20