
多厂家AGV相互避碰和交通管制
2020-11-19 02:17韩旭
装备维修技术 2020年10期
关键词:交通管制
韩旭
摘要:伴随着自动导引小车AGV(Automatic Guided Vehicle)领域内技术的不断成熟,越来越多的企业将AGV应用在生产实际中。如何使多个厂家AGV在同一车间高效并顺畅的运行成为关键问题,本文研究的目标就是使多AGV系统具有更快的响应速度、更高的系统效率以及无冲突的运行。
关键词:多厂家AGV;避碰;交通管制
针对当下多AGV调度系统无法满足独特的工厂车间环境要求的问题,提出了适用于车间环境的交通管制法,设计了基于交通管制的多AGV调度系统。
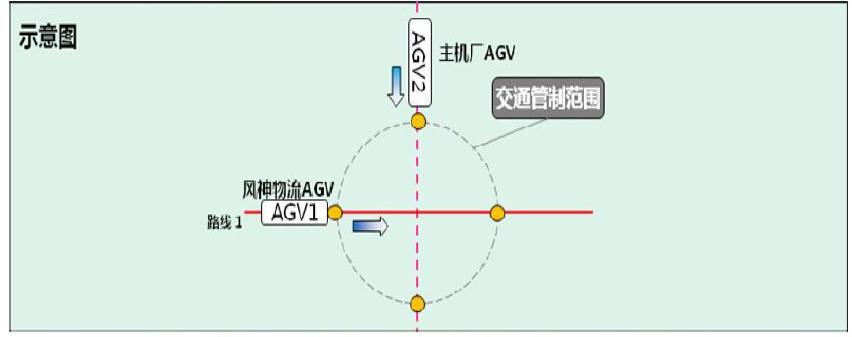
室内交通管理的基础:如图,所谓的交通管理就是在两个AGV运行路线可能产生物理干涉之前将其中的一个AGV停止运行,在另一个AGV通过干涉区域后再放行该AGV。
因而,交通管理的基础有两个,一是在交通管制范围内需要检测各AGV所处的位置,二是在交通管制范围外可以管理AGV的停止和启动。由于AGV之间没有直接的相互控制能力,所以必须依靠外部的设备来完成交通管理,管理的方式可以使用简单的信号灯方案(类似于城市道路路口的红绿灯),也可以使用飞行管理的方案(类似于航空的交通管理),前者为定时放行交通路口,来保证在同一时刻仅能有一个AGV通过路口,后者则在检测各AGV位置的同时根据优先级放行路口周围的AGV,管理者就是系统中的AGV控制台
新松AGV的特点:新松公司的AGV系统采用有控制台的方案,AGV控制台可以通过通讯得到系统中每个AGV的位置,并管理每个AGV的运行方式,也就是说新松公司的AGV是可以通过控制台进行交通管制区域的管理的。
其他厂家AGV的特点:在风神公司的其他厂家的AGV采用无控制台的方案,也就是说只能针对该AGV进行交通管制范围内的检测及启停管理才能完成交通管制区域的管理。一般情况下AGV均会设计有前方的非接触式防碰传感器,可以使AGV在距离障碍物还有一定距离的情况下停止运行,有些AGV会设计有专用的光开关来控制AGV的启动和停止,有些AGV没有光开关控制启动和停止,但会在操作面板上安装控制启动停止的按钮,以实现人工的可操作性,另有一些AGV仅使用单一急停按钮作为AGV启停操纵方式。
目的:本方案的目的是实现新松AGV与其他厂家AGV在运行路线有干涉的情况下,管理各交通路口的安全,新松公司可以根据不同特点的AGV提出不同的方案。
1.交通灯管理方案
该方案的主要特点是不需要检测AGV的位置,类似于城市路口的红绿灯,使用小型PLC或AGV控制台均可实现,管理方式是完全使用时间延时,在不同的时间段内分别放行不同方向的AGV,如可以设定每60秒各放行两路线的AGV一次,这样可以设定10秒放行信号给路线1,然后关闭放行信号20秒,供AGV保证通过该区域,再打开另一路线的放行信号10秒,然后再关闭放行信号20秒,以保证这个方向的AGV能够完全通过该区域,完成一个循环,各方向的AGV在到达交通管制范围边缘时需要检测本方向的放行信号,只有放行信号是允许状态时才能通过。
该方案原理及实现简单,在不允许放行时,对于新松的AGV只需给新松的AGV控制台一个信号即可,对于其他厂家的AGV,需要有办法将其AGV停止,方法与后续方案中涉及的内容相同,后面会有详细说明。但本方案会在一定程度上影响AGV通过路口的效率,需根据系统的实际效率要求来判断是否可以使用。
2.飞行管制方案
该方案的主要特点是路口时间利用率高,需要检测AGV的位置,类似于航空塔台的管理方式,使用AGV控制台采集路口附近AGV的位置信息,根据运行的时序、任务及状态判断放行的优先级,然后判断停止哪一个方向的AGV运行,放行其中一个,待先放行的AGV通过后再放行另一个方向的AGV。AGV控制台通过通讯或线边传感器检测到两个方向的AGV均运行到交通管制范围附近,并有进入该区域的需求,AGV控制台通过信息采集的时间判断路线1的AGV稍早于另一路线AGV进入该区域,因而判断路线1AGV优先,则AGV控制台会通过通讯或线边设备通知另一路线AGV停止运行,该AGV在得到命令后会停止在干涉区域外,在路线1的AGV通过路口后,AGV控制台通知另一路线AGV可以运行,则AGV2可以自行通过路口。
该方案的原理清晰,针对新松的AGV来讲实现简单,因为新松的AGV有实际位置的通讯信息及启停的控制管理,针对其他厂家的AGV,首先要检测AGV是否到达或离开交通管制区域,在AGV进入和离开交通管制区域的点上需要增加检测开关,检测的信息送至新松的AGV控制台中,如果AGV上有可以发送该信息的开关,可以在两个位置上增加接收开关,如果AGV上没有可以发送该信息的开关,则需要在线边增加AGV通过位置的检测传感器,可使用区域扫描传感器或光开关组来完成该检测。另外需要对AGV的启停进行控制,针对不同配置的AGV,控制方案不同,主要有如下几种。
a.有启停控制光开关
针对有启停控制光开关的AGV,可以在控制点处增加相对应的光开关以实现对该种类型AGV的启停控制。光开关由新松的AGV控制台完成控制
b.有启停控制按钮
针对没有启停控制光开关的AGV,如果AGV上有启停控制按钮或相对应的IO点,可以在AGV上进行改造,将其IO信号串接(串联或并联)到控制光开关回路中,再在控制点处增加相对应的光开关以实现对该种类型AGV的启停控制。光开关由新松的AGV控制台完成控制。如果不希望对该型AGV进行改造,可以采用后续的c方案
c.无任何可控制输入点
如果AGV无任何可控制的输入点,则可以在地面需控制AGV停止位置旁增加一小型机械装置,该装置可以控制一个软性遮挡物(一般为带弹性支杆的布板),当需要停止AGV运行时,可将该遮挡物伸出,AGV前方的非接触防碰传感器检测到该物件时会安全停止,当需要放行AGV时,将该遮挡物收回,AGV会自动恢复运行,该装置可由一简单气动或电动的推杆完成控制,因为是带弹性的软性材料,即使伸出时AGV或料架已经在伸出的前方,也不会损坏AGV或其他物品,装置的控制由新松AGV控制台来完成。
参考文献:
【1】高瑜,过金超,崔光照. 一种改进的多机器人路径规划自适应人工势场法[J]. 郑州轻工业学院学报(自然科学版). 2013(06)
【2】过金超,刘征,崔光照. 基于人工免疫网络理论的移动机器人路径规划[J]. 郑州轻工业学院学报(自然科学版). 2012(04)
【3】劉国栋,曲道奎,张雷. 机器人.多AGV调度系统中的两阶段动态路径规划[J]. 2005(03)
猜你喜欢
科学家(2022年5期)2022-05-13
科学家(2022年4期)2022-05-10
科学与财富(2021年34期)2021-05-10
科学与财富(2019年29期)2019-10-21
中国科技纵横(2017年8期)2017-05-20
科技视界(2016年19期)2017-05-18
科学与财富(2016年24期)2017-03-29
科学与财富(2016年24期)2017-03-29
山东工业技术(2017年5期)2017-03-16
科技传播(2016年16期)2017-01-03
