
可升级的基于模糊控制的最优化交通信号灯系统
2020-11-23 12:02张书阳天津工业大学电子与信息工程学院陈佳琦东北石油大学地球科学学院
数码世界 2020年11期
张书阳 天津工业大学电子与信息工程学院 陈佳琦 东北石油大学地球科学学院
1 引言
随着城市的发展其规模在不断扩大,交通也需要不断的提高和改进,交通的是否顺畅已经成为城市发展的一个重要因素。目前,伴随着机动车辆的不断增加,尤其是十字路口的交通问题颇为关键,严重的影响到城市交通安全。但是信号灯的时间并不是十分合理,经常会出现一个方向积压了很多车流量,另一个方向却畅通无阻。基于大数据的最优化交通问题就是来解决当前信号等待时间不均匀的问题,从而最大化实现绿色环保的。
2 理论设计计算
由于我国的交通因出行日期,时间具有车辆多少随机性强的特点,用精确的数学模型来描述比较困难,对单个路口红灯等候时间的优化显得很重要。
对单个路口而言,当交通需求较小车辆比较少时,信号周期则应设置的短一些,但不少于一定秒数的绿灯时间(如果小于这个秒数车辆来不及通过路)。当交通需求很小时,经过观察和计算为了保证车辆的最少通过时间经过按最小周期运行(20秒)。当需求较大时,只能按比较大的时间周期进行控制。这样一个方向的车辆保证了足够甚至更多的通行时间,但另一个方向的车辆产生了比较严重的车辆堵塞现象。所以设计单个红绿灯路口的模糊控制算法变得十分必要且迫切。我将这个表达分为以下几个步骤:第一步从第一个方向开始依次给四个方向分别指定最大绿灯时间;第二步先给一个方向的绿灯最短绿灯时间,记Δt=20秒;第三步在Δt内测得通行车道上的交通需求,设其为K;第四步若K小于某一给定的值r或累积绿灯时间,则将绿灯转到下一方向同时返回第二步,如果不是那么继续;第五步根据K值的大小来确定绿灯延长时间Δt。如果K比较小则少量延长绿灯时间,反之如果K比较大则多延长绿灯时间,依据K值由此建立模糊控制规则。设延长的绿灯时间为Δt,若+ΔG≥70秒,则Δt=70秒;否则该相位的绿灯时间为+ΔG,回到第三步。用车辆等候长度来表示交通需求,建立下述模糊控制规则。将测得的等候车辆长度可看作模糊变量,其论域(单位是辆)为:S={3,8,13,18,23},取5个语言值:(短(),较短(),中等),(较长),(长)。绿灯追加时间Δt及其对应语言值{10(少),20(较少),30(适中),40(较多),50(多)}。根据模糊统计法(或者神经网络法)得出五个控制规则。由5条语言控制策略可组成单输入单输出语言控制策略,每条控制策略可用模糊关系矩阵表示。再求出两者的模糊关系R(规则内取交集,规则间取并集),再进行模糊决策,其中模糊控制器的输出为误差向量和模糊关系的合成。
最后将模糊推理得到的模糊量进行反模糊化,变换为应用于交通信号灯中控制精确量,从而实现了对交通路口一个方向的绿灯时间的模糊控制。其中要遵顼“隶属度度最大原则”进行反模糊化。
当然随着通信技术的进步,芯片成本的降低,我们可以把这个模糊控制系统升级为模糊自适应PID系统。因为像今年南方比往年频发的大量降雨引发的洪水问题,红绿灯路口的等候规则(属于非人为因素)就需要马上修改。而自适应控制运用现代控制理论,使用云计算的方法通过稳定的信道传送给交通信号灯。具体操作是利用往年暴雨条件下(也可设置其他非人为因素)操作人员的参数正定经验存入计算机中,这样就实现了智能(模糊自适应)PID控制器。这种控制器可以把模糊控制系统和先进的专家系统相结合,使交通信号灯在面对人为因素(如消防车,救护车经过)和非人为因素(冰雹洪水等)时,有了更加智能的应对方法。
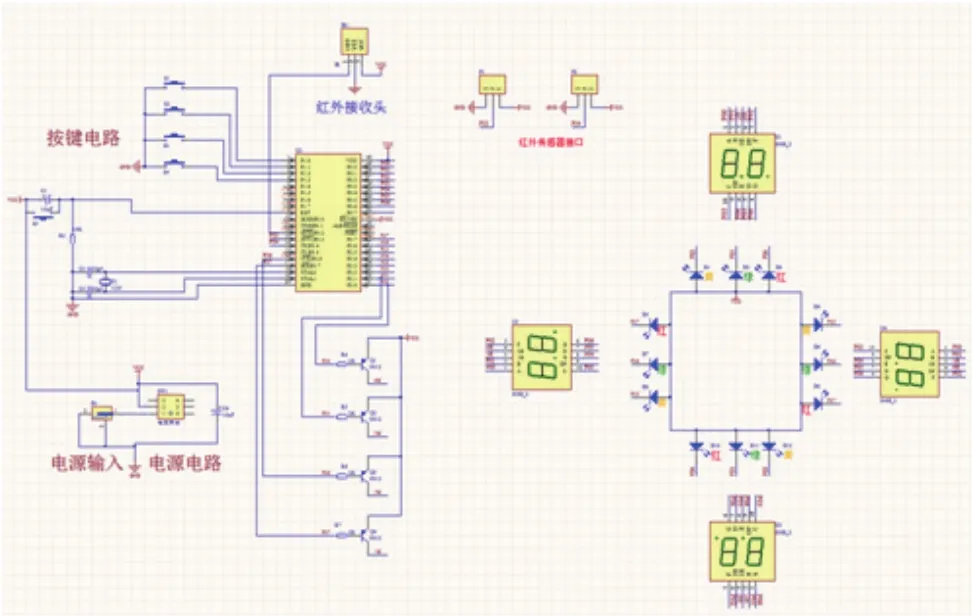
3 用单片机最小系统模拟
设计的最优化交通信号灯系统分为三部分。基础数据采集依靠红外线传感器来统计上一次经过的车辆。第二部分采用STC89C51单片机以及单片机最小系统算出下一次绿灯时间同时传送给信号灯,第三部分通过信号灯来反映实际情况。本设计的控制部分由单片机+按键+发光二极管+共阳数码管+三极管设计而成。可以手动设置东西、南北的倒计时时间、可以设置黄灯闪烁时间。采用四方向数码管设计,更加符合真实的交通信号灯设计。同时通过红外传感器实时监测车流量,通过在同期车流量和临时车流量两个因素来共同决定下一时刻的红绿灯时间长度,减少车辆排队等待时间,使问题得到最优化解决,最大程度减少车辆车辆等候时间。
使用红外线探头来测量上一次绿灯时车流量的多少,并自动调节下一次绿灯的时间。有效的缓解了车辆等候时间,避免了拥堵。夜间模式是比较简单,使4个方向黄灯闪烁。当消防车、救护车等特殊车辆通行时按下”紧急模式键”全部亮红灯,待紧急车辆通过后,再恢复后。
设计的系统默认是当南北方向绿灯时间最开始为20s,当车流量3到8之间时时间量增加10s,当车流量8到13之间时时间量再次增加10s,当车流量13到18之间时时间量再次增加10s,当车流量18到23之间时时间量再次增加10s,当车流量23以上时时间量增加到70s。车流量的增加根据模糊算法得到的参数是可以修改的。设计一个车辆数量的隶属函数(使用的是模糊统计法)在{3,8,13,18,23}之内按大小的顺序划分为五个等级即{短,较短,中等,较长,长}。采用五个三角形隶属度函数来表达,从而建立一个模糊系统。具体来优化绿灯时间,使增加的时间不在以10s为单位,更加优化了等候时间。
4 结束语
交通信号灯系统具有较大的随机性和不可控制的非人为因素影响,建立一个数学模型比较困难。而模糊控制方法适用于较大随机可能性的城市交通系统的控制。在未来科技进一步发展后还可以在原来的模糊控制基础上升级为模糊自适应PID系统。避免了科技升级带来的资源二次浪费。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
成都信息工程大学学报(2021年6期)2021-02-12
小天使·一年级语数英综合(2018年6期)2018-06-22
神州·中旬刊(2017年1期)2017-06-28
华人时刊(2016年19期)2016-04-05
数学教学通讯·初中版(2015年5期)2015-06-17
小学阅读指南·低年级版(2014年5期)2014-09-15
