
光学下滑道指示误差对舰载机着舰影响分析*
2020-12-02 11:44
舰船电子工程 2020年10期
(海军航空大学 烟台 264001)
1 引言
航空母舰的甲板跑道很短,飞行员直到距离航空母舰很近时,才能确定飞机是否对准跑道中心线,因而容易发生偏航事故。同时,航空母舰又在海上不停地运动,纵摇、横摇、升沉、行驶等,使得着舰的瞄准点飘忽不定,增加了飞行员瞄准着舰点的难度[1~3]。
只有在系统的精确引导和指挥引导人员的准确指挥下,舰载机才能在航母上安全准确地完成着舰。舰载机进行着舰需要多个引导设备进行综合交替引导,是一个复杂而精细的过程[4]。舰载机飞行员在着舰的最后阶段主要靠光学助降装置提供的引导光束形成的光学下滑道目视着舰[5],因此,光学下滑道的引导精度直接关系着舰载机着舰的成功率。研究光学下滑道的指示误差对舰载机着舰的影响至关重要。
2 光学下滑道稳定方式分析
2.1 四种稳定方式
光学助降装置是当前舰载机着舰引导设施中主要的近程着舰引导设备,它采用一定的稳定方式,通过相应的补偿算法控制随动系统对航母的纵摇、横摇和升沉等运动进行补偿,为舰载机飞行员提供一个能够引导其进行目视着舰的相对稳定的光学下滑道[6~7]。目前,常见的下滑道稳定方式有点稳定、角稳定、线稳定和惯性稳定四种方式[8~10]。
1)点稳定:整个下滑道光束只相对离透镜设置的一个固定点保持稳定,一般为2500英尺(762m),为保持这一个点的稳定性,下滑道需进行上下平移和俯仰运动,补偿舰姿态角变化。
2)角稳定:通过随动系统控制灯箱的纵摇运动,使下滑道光束保持空间角度不变,即俯仰不变,不对舰纵摇、横摇、升沉引起的下滑道高度变化进行补偿。
3)线稳定:通过随动系统对舰船的纵横摇进行补偿,利用包括瞄准灯组和辅助灯组在内的灯光阵列系统,为返航着舰的舰载机提供一个光学下滑道引导光束,引导飞行员进行目视着舰。下滑道在空间相对稳定,不受舰纵摇、横摇姿态角变化影响,仅随舰的升沉运动而垂直变化。
4)惯性稳定:保持下滑道光束在惯性空间绝对稳定,不受航空母舰纵摇、横摇和升沉运动的影响,也称点和线稳定。
2.2 稳定方式分析
点稳定、角稳定两种方案无法保证下滑道在空间的完全稳定,飞行员会觉得下滑光波束仍随航空母舰运动而上下运动,而且飞机离理想着舰点越近,下滑光波束的运动越剧烈。
惯性稳定在线稳定方案基础上增加了对升沉运动的补偿,减少了飞机机动,减轻了飞行员操纵负荷。但是当航母抬升或下沉1m时会引起着舰点沿跑道中心线相应的向舰艉或舰艏移动1/tanβ0(m),对安全着舰产生巨大的影响(β0是基准下滑光波束角)。
因此,本文针对线稳定方式进行分析研究光学下滑道指示误差对舰载机的着舰影响。
3 线稳定原理分析
线稳定是惯性稳定衍生出来的一种稳定方式,通过在惯性稳定的基础上去掉了浮沉补偿而形成。在线稳定方式下,下滑道光束不会随着航空母舰的纵摇和横摇而晃动,只会随航空母舰升沉运动而上下偏移。线稳定下的引导光束下滑道示意图如图1所示。
光学助降装置中有5个单体瞄准灯箱,通过菲涅尔透镜等光学元器件,分别向空中发射一层光束,形成一组有3种颜色、5个层次的光束(从上往下分别为1层黄色,3层橙色,1层红色)。中间的一层光束所在的平面与着舰跑道中心线的垂直甲板交面的相交线,就是理想状态下舰载机的理想下滑道,如图2所示[11]。

图1 线稳定引导光束下滑道示意图

图2 光学助降装置工作示意图
4 光学下滑道指示偏差分析
4.1 “肉球”的形成与偏移
“肉球”其实是人所看到的光束反向聚焦形成的一个光体,它是一个虚像。飞行员着舰时看到的“肉球”并不是菲涅尔透镜所在的位置,而是在其后方某一个固定点处发出来的,因为五层光波束都反向聚焦在这个虚像点上[12]。由于“肉球”的位置偏移与舰载机相对光基准下滑线的偏移成正比的关系,因此可以用“肉球”的位移大小来表示舰载机的的下滑偏差,如图3所示。

图3 “肉球”的偏移
4.2 光学下滑道指示误差对着舰的影响分析
舰载机如果按照基准下滑道下滑,则尾钩便可成功勾住阻拦索。但是假如光学助降装置存在一定偏差,则会引起光学下滑道指示误差,造成“肉球”偏离基准位置,而“肉球”的偏移同时也引起舰载机着舰时,实际着舰点与理想着舰点之间的偏差,如图4所示。

图4 光学助降装置指示误差影响示意图
图中,O点表示光束反向聚焦点即虚像的位置,F点表示理想着舰点,它们之间的水平距离为L。A点表示舰载机飞行员的,C点为过A点的垂直平面和O点所在位置的水平面的交点,D点为过A点的垂直平面和F点所在位置的水平面的交点,OC=Rx,CD=Δh,d表示“肉球”偏移量,ha表示舰载机的下滑偏移量,β0表示舰载机理想的下滑角,β表示舰载机的实际下滑角,两个角度之间的差即为下滑偏差角e。
由图4可知,FF′即为着舰点偏差。根据图中所示的位置关系可以得到

5 实验计算
设下滑基准光波束角为β0(单位:°),“肉球”的虚像位置在下滑道与水平基准光条前方L(单位:m)处的垂直平面的交点处(由于数据的保密性,相应数据用字母表示)。虚像的位置低于水平基准光条所在的水平面。
表1给出下滑偏差角e和“肉球”偏移量d的关系。

表1 下滑偏差角e和“肉球”偏移量d的关系
由此,根据图4所示的几何关系,可推导出下滑偏移量ha和“肉球”偏移量d的关系为

经过仿真,下滑偏移量与“肉球”偏移量以及舰载机距理想着舰点距离之间的关系如图5所示,图中“肉球”偏移量和下滑偏移量均为偏高数。

图5 下滑偏移量与“肉球”偏移量以及舰载机距理想着舰点距离关系图
着舰偏差量与“肉球”偏移量的关系如图6所示,着舰偏差量偏向舰艏方向为正,偏向舰艉方向为负。
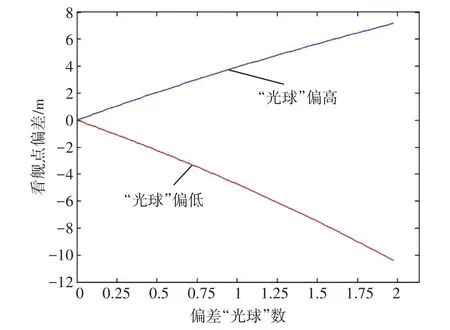
图6 “肉球”偏移量对着舰点偏差的影响
通过以上仿真结果可以得出,下滑偏移量与“肉球”偏移量以及舰载机距理想着舰点距离均成正比例关系;着舰偏移量与“肉球”偏移量也成正比例关系。随着“肉球”偏移量的增大,实际着舰点与理想着舰点之间的偏差越来越大。当“肉球”偏高时,实际着舰点在理想着舰点前方;偏低时,实际着舰点在理想着舰点后方。
当达到安全着舰允许的最大偏差值时,应对光学助降装置进行校准,以便于更好地引导飞行员安全顺利着舰。
6 结语
舰载机的安全着舰是遂行海上任务的前提,而舰载机的安全着舰很大程度上依赖于光学下滑道的指示引导。本文对线稳定方式下,光学下滑道的指示误差对舰载机着舰的影响进行分析,通过仿真定量给出了不同“肉球”偏移量对应的着舰误差,为飞行员着舰提供了辅助作用,同时也可以作为对光学助降装置进行校准的一个依据。
猜你喜欢
新青年(2022年7期)2022-07-19
量子电子学报(2022年3期)2022-06-10
阅读(科学探秘)(2022年5期)2022-06-07
地理空间信息(2022年3期)2022-04-01
奥秘(2021年3期)2021-04-12
计算机辅助工程(2018年4期)2018-10-09
价值工程(2018年13期)2018-05-03
快乐作文·低年级(2016年11期)2017-05-09
小学教学研究·新小读者(2016年11期)2016-12-03
地震研究(2016年4期)2016-11-25
