
微小型金属壳谐振陀螺幅值稳定控制方法研究
2020-12-07 06:12卫炳乾刘宁苏中张小宇
现代电子技术 2020年21期
卫炳乾 刘宁 苏中 张小宇

摘 要: 针对金属壳谐振陀螺振子小型化设计,电极控制力过小导致响应时间慢的问题,传统四回路PI控制难以有效解决,提出一种微小型金属壳谐振陀螺幅值控制方法,有效提高响应速度。在分析微小型金属壳谐振陀螺工作原理的基础上,对传统四回路PI控制器进行研究,提取幅值作为被控对象,设计微分先行控制器,搭建算法仿真平台。通过仿真验证,文中方法比传统四回路PI控制方法响应速度提高,角速率解算时间缩短。
关键词: 金属壳谐振陀螺; 幅值提取; 幅值控制; 角速率检测; 微分先行控制; 系统仿真
中图分类号: TN876?34; TP212.1 文献标识码: A 文章编号: 1004?373X(2020)21?0093?04
Research on amplitude stability control method of microminiature
metal?shell resonance gyro
WEI Bingqian1, LIU Ning1, 2, SU Zhong1, 2, ZHANG Xiaoyu1
(1. Beijing Key Laboratory of High Dynamic Navigation Technology, Beijing Information Science and Technology University, Beijing 100101, China;
2. Key Laboratory of Modern Measurement and Control Technology, Ministry of Education, Beijing 100101, China)
Abstract: As it is difficult for the traditional four?loop PI control to effectively solve the problem of slow response sped caused by insufficient electrode control force in miniaturization design of the metal?shell resonance gyro, an amplitude control method of microminiature metal?shell resonance gyro is proposed to effectively improve the response speed. On the basis of analysis on the working principle of microminiature metal?shell resonance gyro, the traditional four?loop PI controller is studied, the amplitude is extracted as the controlled object, the differential advanced controller is designed, and the algorithm simulation platform is built. The simulation results show that, in comparison with the traditional four?loop PI control method, the proposed method has higher response speed and shorter angular rate solving time.
Keywords: metal?shell resonance gyro; amplitude extraction; amplitude control; angular rate detection; differential advanced control; system simulation
0 引 言
金属壳谐振陀螺相比于光学陀螺仪和转子陀螺仪而言,采用微幅振动的高强度合金谐振子代替高速旋转的机械转子,更加适合应用于高动态环境下的角速率测量[1?4]。受限于高动态环境下空间、工作条件等约束,振子小型化是发展趋势,如美国密歇根大学研制的微半球谐振陀螺样机[5?6],国防科技大学研究出的微型壳体谐振结构[7]。多控制回路方法被应用于金属壳谐振陀螺,取得了一定的效果[8],而针对微小型金属壳谐振陀螺控制回路算法有待进一步研究。小型化设计势必对振型控制和角速率测量问题带来更大难度。传统控制回路研究中,大多数回路均采用单一PI控制,响应时间慢,超调量大。本文讨论金属壳谐振陀螺在振子小型化后带来的反应时间长等问题,利用二阶弹簧振子作为控制模型,在四回路中加入微分先行PID控制和PI控制,二者结合快速实现陀螺角速率测量。
1 工作原理
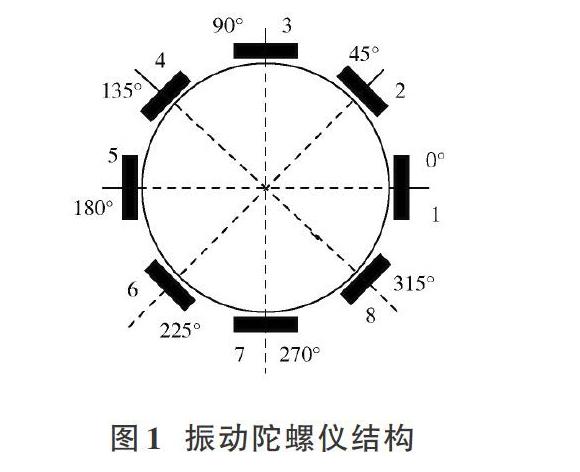
微小型金属壳谐振陀螺是基于振动质量的哥氏力效应工作的,利用谐振子旋转产生的哥氏效应引起振型的移动实现对角速度的测量[9]。幅值控制是陀螺实现稳态振动的先决条件[10]。金属壳谐振陀螺利用压电激励电容检测,在描述时,可采用如图1所示的控制截面的示意图,截面外表面均布有8个激励与检测机构,为分析控制回路提供了一个基本对象,方便将研究的回路设计方法与实际陀螺情况相结合,8个电极分别为激励电极、阻尼控制电极、反馈电极、检测电极,对激励电极施加频率为金属壳谐振陀螺固有频率的正弦信号作为激励信号,振子会产生振动,利用反馈电极计算实际钟形振子的振动情况,从而解算出角速率[11?12]。
2 角速率检测方法
根据金属壳谐振陀螺的工作原理,基于二阶弹簧振子模型[3],利用激励、反饋、阻尼、检测四对电极组成控制回路,回路中加入控制算法,可以得到敏感轴向与驱动轴向的输出和角速率解算情况。
2.1 控制模型
利用二阶弹簧振子模型作为驱动轴向和敏感轴向之间的控制数学模型[3]。
[fx=x-2nkΩy+2τ+Δ1τcos 2nθτx+Δ1τsin 2nθτy+ ω2-ωΔωcos 2nθωx-ωΔωsin 2nθωyfy=y+2nkΩx+2τ-Δ1τcos 2nθτy+Δ1τsin 2nθτx+ ω2+ωΔωcos 2nθωy-ωΔωsin 2nθωx]
(1)
式中:[fx]和[fy]是对应轴所施加的激励力;[k]为进动因子;[n]是唇缘振动的模态阶数;[Ω]是输入的角速度;[θω]是激励力与固有轴系之间的角度;[θτ]是感应力和固有轴系之间的角度;[ω2=ω2x+ω2y2],[ωΔω=ω2x-ω2y2],[1τ=121τx+1τy],[Δ1τ=1τx-1τy],[τx],[τy]是时间延迟常数;[ωx]是激励模态下的频率;[ωy]是检测模态下的频率。
2.2 控制回路
针对微小型金属壳谐振陀螺的角速率测量,设计了四控制回路,在驱动轴[p]轴设计频率控制回路,使谐振子驱动信号频率维持固有频率,幅值控制回路令陀螺谐振子恒幅振动。在此条件下,设计速率回路控制和正交回路控制,采用力平衡的方式,调整施加在阻尼控制电极上的控制力矩,保持振型稳定,抑制陀螺检测轴[q]轴振动,在此情况下,速率控制回路的控制器输出正比于输入角速率[12]。整个系统的主要框图如图2所示。
2.2.1 误差分析
金属壳谐振陀螺由于谐振子小型化设计后压电电极距离过近和存在的加工误差等,多个控制回路的每个电极均会收到驱动电机的干扰信号,形成了多回路相互耦合的现象,令陀螺的控制系统变得十分复杂,降低了金属壳谐振陀螺的性能,如零位漂移、比例系数稳定性等[13?14]。如果仅引入单个回路控制,将会造成电极间耦合信号相互影响,噪声相互叠加,降低陀螺性能。幅频控制回路和正交控制回路都是带扰动的二阶系统,其间的耦合严重会造成扰动剧烈,无法精确快速测量角速率,故采用多种算法结合可以解决此问题。
2.2.2 微分先行PID控制
微分先行PID控制相对于传统PI控制,加入微分环节,对误差的变化趋势敏感,在误差信号出现之前对误差进行修正,有利于显著提高系统的响应速度,减少被控对象的超调量,改善系统动态特性[15]。控制结构如图3所示。
微分部分的传递函数为:
[uD(s)y(s)=TDs+1γTDs+1, γ<1] (2)
式中[1γTDs+1]相当于低通滤波器。则:
[γTDduDdt+uD=TDdydt+y] (3)
差分得到:
[duDdt≈uD(k)-uD(k-1)T] (4)
[dydt≈y(k)-y(k-1)T] (5)
[γTDuD(k)-uD(k-1)T+uD(k)=TDy(k)-y(k-1)T+y(k)]
(6)
得到[uD(k)=c1uD(k-1)+c2y(k)-c3y(k-1)],式中:[c1=γTDγTD+T],[c2=TD+TγTD+T],[c3=TDγTD+T],其中,[TD]为微分系数,[γ]<1。
2.2.3 控制器设计
驱动信号通过调制解调,加入低通滤波器过滤高频信号后作为驱动轴[p]轴的输入信号[16],在幅值控制回路中加入微分先行PID控制,在频率以及速率和正交回路中加入PI控制。微分先行控制有利于快速调整输出激励信号,提高响应速度,降低超调量,令振子能够快速维持在固有频率上振动。此方法硬件复杂程度低,算法易实现。控制器流程如图4所示。
3 仿真与实现
在系统仿真中,采样周期为5 ms,输入正弦激励信号幅值为20 mV,加入控制器,以及微小型金属壳谐振陀螺数学模型,角速率输入曲线分别为正弦波、三角波和方波,利用Matlab对陀螺整体控制回路进行仿真,Simulink仿真图如图5所示,陀螺具体参数如表1所示。
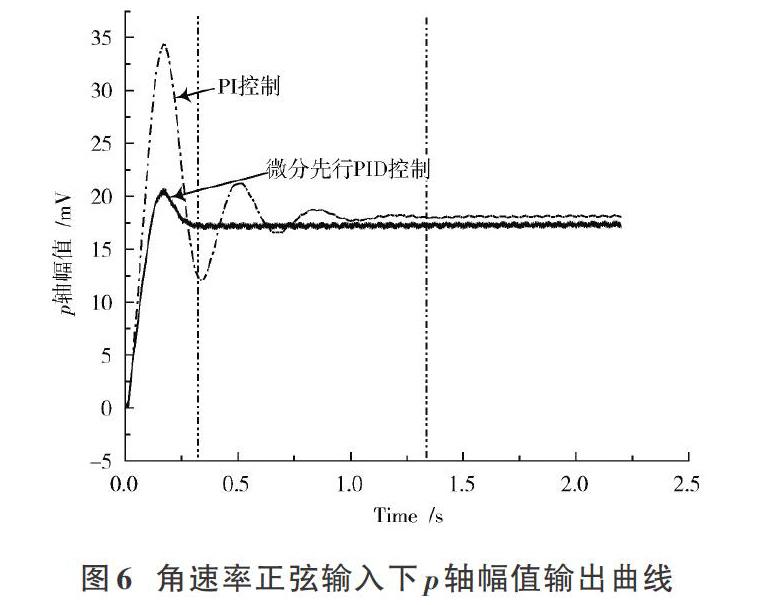
当角速率输入曲线为正弦时,在幅值控制回路中分别加入PI控制和微分先行PID控制,得到驱动轴[p]轴输出幅值曲线如图6所示,检测轴[q]轴输出幅值曲线如图7所示。微分先行PID控制中,参数设定[γ=0.01],[TD]=300,加入算法后,角速率解算结果如图8所示。改变角速率输入为三角波和方波,分别加入两种控制,得到角速率解算情况如图9和图10所示。
由仿真结果可以得到,当输入角速率以正弦波形式存在时,利用多回路控制和检测方法,在幅值控制回路中加入微分先行PID控制算法,在频率控制回路和检测轴向回路中加入PI控制,通过参数调节,实现角速率测量,且幅值控制回路调节时间从1.3 s减少到0.3 s,能够快速实现幅值稳定,超调量明显减少;检测轴[q]轴受到幅值控制回路的影响,其幅值调节时间减少到0.3 s左右;角速率解算过程中,微分先行PID控制调节时间相比于PI控制减少两个周期。
将角速率分别以三角波和方波形式输入,从图9,图10中可看出,由于在幅值控制回路中加入微分先行PID控制算法,角速率以三角波形式输入时,解算调节时间相比PI控制减少两个周期,超调量低;以方波形式输入,微分先行PID控制无明显超调量,调节时间缩短。由此可得,在幅值控制回路下加入微分先行PID控制算法响应速度明显优于PI控制,并且角速率解算响应速度得到提升。
