基于随机时间影响网络的联合火力打击动态武器目标分配问题研究
2020-12-08 07:26王志梅
指挥控制与仿真 2020年6期
田 伟,王志梅,段 威
(1.中国人民解放军92192部队,浙江 宁波 315122;2.中国人民解放军91001部队,北京 100055)
武器目标分配(Weapon Target Assignment,WTA)问题[1-8]是联合作战火力规划过程中亟待解决的重难点问题。为避免打击不足或重复打击,联合火力打击按照“侦、控、打、评”四个步骤循环往复进行,直至达成作战目的。设定输出一次火力分配方案为一个时间阶段,其基本任务是在K个时段内,分配M个武器打击N个目标,使得作战效果最大化。WTA模型通常分为两种:1)静态武器目标分配(Static Weapon Target Assignment,SWTA)模型,即考虑某个时间段的武器目标分配;2)动态武器目标分配(Dynamic Weapon Target Assignment,DWTA)模型,即考虑离散时间段的武器目标分配。目前大多数文献[9-16]都是针对SWTA问题进行建模,模型结构清晰、计算效率较高,但未考虑打击顺序对作战效能的影响,并且简单将目标毁伤效果、目标威胁系数等作为优化目标,难以反映目标毁伤对使命任务达成的实际支撑作用。另外,战争的不确定性和战场环境的复杂性,导致目标在时间和空间上具有不确定性,因此,传统意义上的SWTA模型已不能满足实际作战指挥决策的需求,因此考虑时间因素影响的DWTA模型的研究逐渐成为近年来的研究重点。Hosein等人[8]在研究C3(Command, Control and Communication,C3)节点防卫问题时,提出基于资源的WTA问题的动态版本,并为动态问题提供一种启发式方法;王士同等人[17]基于SWTA建立了两阶段DWTA问题模型,用动态规划方法解决SWTA问题;王正元博士[18]根据进攻炮弹摧毁目标的方式建立了4类坦克战DWTA模型,但并未考虑时间约束;韩松臣教授[19]考虑新目标的随机出现,基于马尔可夫决策过程建立了防空作战DWTA模型,并提出策略优化与匹配优化相结合的求解算法,但对随机事件的处理还需与实际做进一步结合。
当前,DWTA问题研究主要集中在求解方法上,对于模型的研究还比较有限,主要难点:1)有效反映时间因素对武器目标分配过程的影响;2)量化评价打击目标毁伤对使命任务达成的支撑效果,即要求量化描述敌物理目标能力丧失与我使命任务达成概率之间的复杂因果影响关系。为此,本文引入时间窗口概念[20]建立DWTA模型的时间约束条件,同时,为克服贝叶斯网络的条件概率知识获取和概率推理的瓶颈,合理分析打击目标毁伤与使命达成效果间因果影响强度的动态不确定性,在时间影响网络(Time Influence Nets,TIN)[21]的基础上,引入时延可变强度、随机信度序列和随机时间延迟等参数,构建敌物理目标与我使命任务之间的随机时间影响网络(Stochastic Time Influence Network,STIN)模型[22-23],从而建立使命达成目标函数的数学模型。
1 DWTA数学模型
1.1 DWTA问题描述
联合火力打击行动是指在明确作战目的的前提下,运用多军兵种力量对敌目标系统实施火力打击的作战活动,DWTA问题可描述如下:假设我方武器系统由M个武器平台组成,不同的武器具有不同的弹型、弹量、毁伤能力及射击条件;初始状态下探测到敌方目标系统由N个不同类型的目标组成,并且整个火力打击过程中,敌方来袭目标随机出现;根据敌我武器装备战技术性能指标,结合演习演练数据积累,假设已知不同武器对不同目标的毁伤概率Pij(i=1,2,…,M;j=1,2,…,N);Xij为决策变量,当指派武器平台i打击目标j时Xij=1,否则Xij=0。则以输出一次火力分配方案为一个打击波次,联合火力打击DWTA过程即是在不确定的K个阶段内合理分配“武器目标对”X(k)(k=1,2,…,K),以求使命达成概率最大化,总体火力分配方案可表示为W={X(1),X(2),…,X(K)}。其中,
j=1,2,…,N
(1)
需要说明的是,火力打击过程中某个时段ks(ks=1,2,…,K)可能出现的新目标,将导致敌方目标系统动态变化,此时应基于ks时段前已执行的火力分配方案{X(1),X(2),…,X(ks)},重新进行后续阶段的武器目标优化分配。
1.2 目标函数
联合火力打击DWTA问题是一个典型的多目标约束优化问题,它要求在有限时间内尽最快速度、最大可能实现作战目的,达成使命任务,并最大化保存自身战斗力。因此,联合火力打击DWTA模型具有三个目标函数:1)使命达成概率最大化f1(W);2)剩余战斗力最大化f2(W);3)行动时长最小化f3(W)。
其中,剩余战斗力主要取决于武器平台剩余弹量及对应弹型,已知不同弹型的毁伤能力,据此便可实现剩余战斗力的定量表达;行动时长取决于阶段数K以及各阶段时间损耗,各阶段耗时主要发生于“侦、控、评”三个环节,而本文主要关注“打”的环节,因此可仅用阶段数K来表示行动时长;使命达成概率与敌各目标能力的丧失息息相关,但由于敌目标能力丧失与我使命达成概率之间的因果影响关系以及目标与目标之间的复杂关联关系难以定量描述,从而导致使命达成概率难以解析表达。因此,如何合理表述目标之间以及敌目标能力丧失与我使命任务达成之间的复杂因果影响关系是解决问题的关键。
完成顶层使命任务可能需要达成多个作战效果,并且作战效果可进一步向下分解形成多个下级作战子效果,直至直接对应物理目标,并且某目标的毁伤可能直接或间接造成其他目标能力的丧失,从而直接或间接支撑顶层使命任务的达成。由此可知,要想实现使命达成概率的量化表达,必须合理量化描述打击目标之间、作战效果之间、打击目标与作战效果之间的复杂因果影响关系。而随机时间影响网络是描述动态不确定性环境下因果影响关系的有效方法,广泛应用于基于效果作战(Effects-Based Operations,EBO)领域[24],能够很好地描述作战任务直接或间接效果产生和传播时间的不确定性以及物理目标能力丧失和使命任务达成概率间因果影响强度的动态不确定性。
因此,本文首先对顶层使命任务进行分解,以顶层使命任务、完成使命任务须达到的作战效果以及相应的下级子效果为节点、以使命节点与效果节点、效果节点与效果节点之间的影响关系为边,构建使命任务层STIN模型;以打击目标为节点,以目标节点之间的因果影响关系为边,建立物理目标层STIN模型;最后以效果节点及其直接对应的目标节点之间的因果影响关系为边连接使命任务层STIN模型和物理目标层STIN模型,从而实现使命达成概率的非解析表达。
随机时间影响网络数学模型描述为以下九元组:
STIN=〈Vm,Ve,Vt,E,C,Be,Bt,D,F〉
Vm:表示顶层使命任务节点构成的有限集合,一般为单节点集,集合元素类型为枚举名称。
Ve:表示效果节点构成的有限集合,集合元素类型为枚举名称。自顶向下分解顶层使命任务可得诸多效果节点及子效果节点,直至直接对应火力打击目标。
Vt:表示打击目标节点构成的有限集合,集合元素类型为顺序编号。
E:表示节点之间构成的有向连边集合,E=NmONe∪NeONt∪NtONt,集合元素类型为枚举整数,如0、-1和1。其中,NmONe表示使命节点与效果节点之间的有向连边,NmONe⊂Nm⊗Ne;NeONt表示效果节点与打击目标节点之间的有向连边,NeONt⊂Ne⊗Nt;NtONt表示打击目标节点相互之间的有向连边,NtONt⊂Nt⊗Nt,⊗表示笛卡尔积。
C:表示使命节点和效果节点、效果节点和打击目标节点以及打击目标节点相互之间的时延可变强度集合。对于∀e∈E,∃Se∈C满足映射fc:e|→Se,其中Se=fSe(Ωe)表示有向边e相关的时延可变强度集合,Ωe表示有向边e所对应的时间延迟集合。
Be:表示效果节点基准概率构成的有限集合,即效果节点达成的初始概率,取值范围为[0,1]。
Bt:表示目标节点的基准概率集合,基准概率是指在没有任何影响关系的条件下,目标节点能力丧失的概率,取值范围为[0,1]。
D:表示节点之间的影响效果信息产生或传递的随机时间延迟集合,对于∀e∈E,∃ξ∈D满足fd:e|→ξ,其中,ξ~Pde(Ωe),集合Ωe是由非负整数组成的有限集合,表示随机时间延迟ξ的取值空间,Pde(Ωe)表示定义在集合Ωe上的离散概率分布。
F:表示物理目标层STIN中目标毁伤概率函数构成的集合,其中第j个目标对应的毁伤概率函数为:y=fj(Z),其中,Z=(z1,z2,…,zm)为打击该目标我方武器数目向量,即该目标的火力分配方案,输出为第j个目标的毁伤概率,取值范围为[0,1]。
此外,三个目标函数之间具有不可公度性和不相容性,本文采用效用函数法统一其量纲和数量级,分别构建效用函数g1(W)、g2(W)和g3(W),并且通过加权求和的方法引入决策者的主观偏好意愿,从而解决多目标优化问题。综上,DWTA问题的目标函数描述为
maxg(W)=α1g1(W)+α2g2(W)-α3g3(W)
(2)
其中,α1+α2+α3=1。
1.3 约束条件
联合火力打击行动的实施时刻受到各种各样的约束限制,既有时间上的,也有空间上的;既有对敌的,也有对我的;既有主观的;也有客观的。从主客观角度分析,可建立如下约束条件。
1.3.1 主观约束
1)主观时间约束
为控制作战进程,可由指挥员定下其可接受的最长行动时长,即Kmax,则有
K<=Kmax
(3)
2)使命达成概率约束
为体现指挥员作战决心,可由指挥员指定最低使命达成概率Dmin,则有
g1(W)≥Dmin
(4)
3)主观策略约束
其是指指挥员针对我火力资源分配提出的战法策略要求,是指挥员战争艺术的体现,主要有:
①为避嫌重复打击,限制目标j可被分配的最大武器单元数量为sj,则在整个作战过程中,目标j需满足条件:
(5)
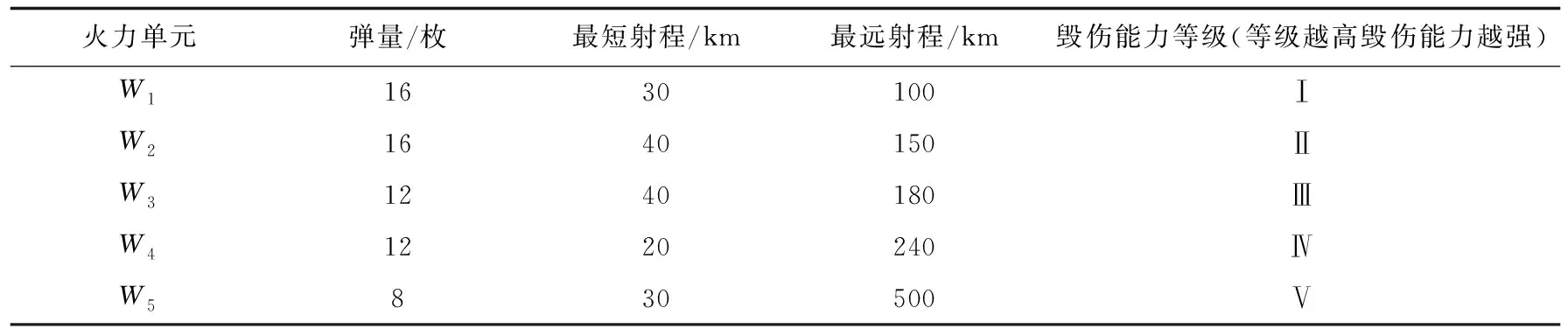
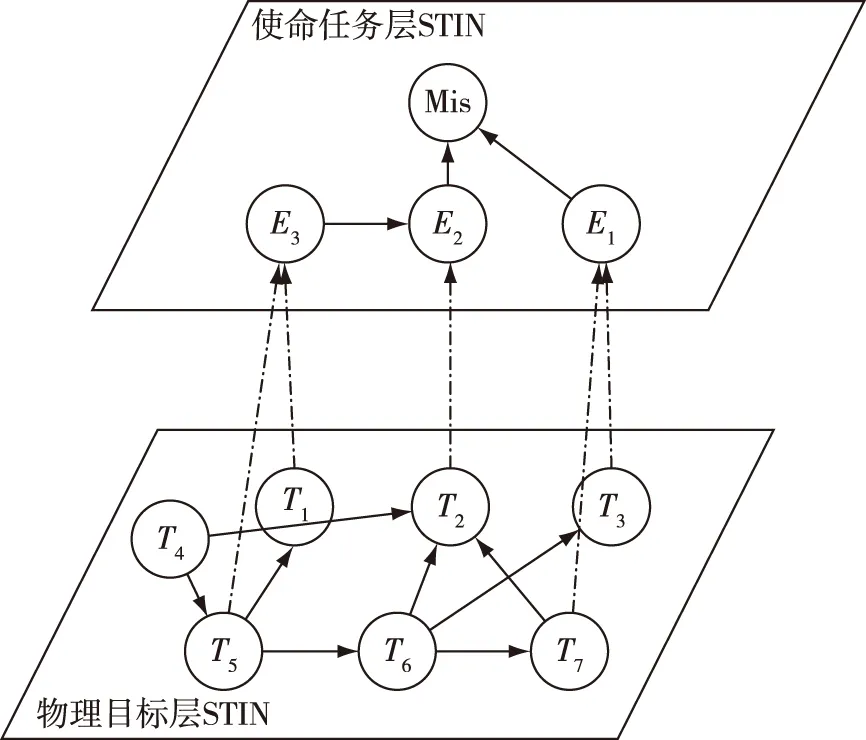
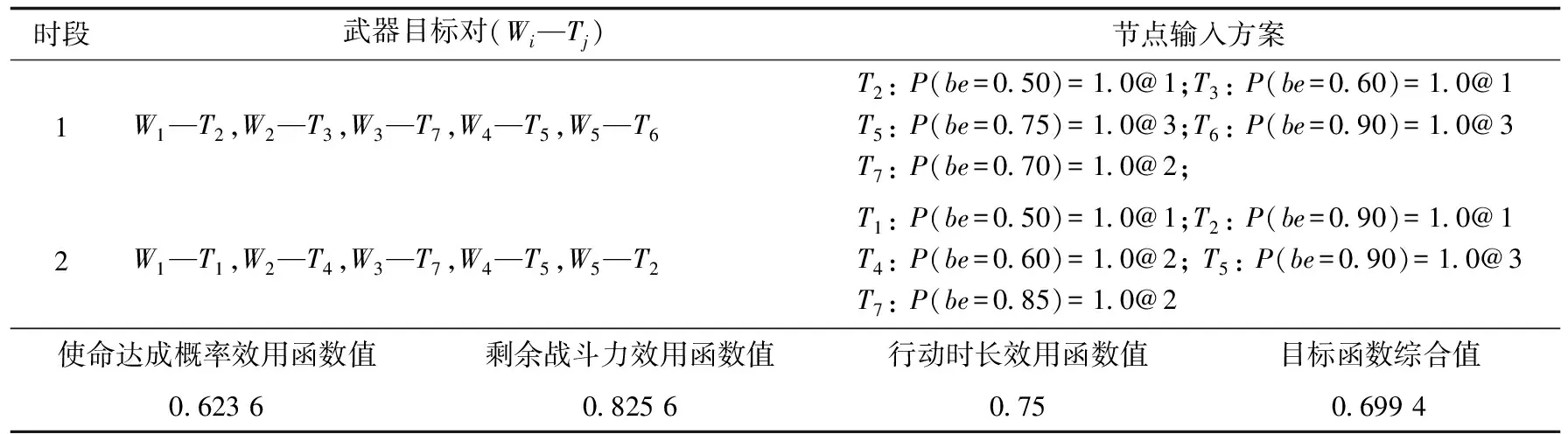
②当k≤tCij (6) ③要求一个武器平台在同一阶段只能打击一个目标,武器平台i需满足条件: (7) 1.3.2 客观约束 1)客观空间约束 主要指敌我空间位置条件对我火力分配过程的约束限制。设Pij(k)表示第k阶段目标j相对于武器平台i的航路捷径,Pimax表示武器平台i能够打击目标的最大航路捷径;Vj(k)表示第k阶段目标j的速度,Vimax表示武器平台i能够打击目标的最大速度;θij(k)表示第k阶段目标j相对于武器平台i的航向角,θimax表示武器平台i能够打击目标的最大航向角;Hj(k)表示第k阶段目标j的高度,Himin,Himax分别表示武器平台i能够打击目标的最小、最大高度。目标j若满足条件: (Pij(k)≤Pimax)∧(Vj(k)≤Vimax)∧(θij(k)≤θimax)∧(Himin≤Hj(k)≤Himax) (8) 则可确定在第k(k=1,2,…,K)阶段,目标j在武器平台i的作战空域内。 2)客观时间约束 主要指战场态势的迅速演变对我火力分配过程提出的快速反应要求。在满足目标空间约束的前提下,引入时间窗概念,设tDij、tCij分别表示目标j到达武器平台i作战空域远界、近界的时间,如果目标j未进入武器平台i的作战空域,tDij=tCij=0;在第k个时间阶段,目标j若满足条件tDij≤k≤tCij,则武器平台i对目标j具备打击条件,否则Xij(k)=0,tEij=tCij-tDij称为武器平台i打击目标j的时间窗口。 3)客观资源约束 设武器平台i的武器单元数量为bi,则在整个作战过程中,武器平台i需满足条件: (9) 此外,目标函数实质上也对我火力分配过程提出一定要求,如使命达成概率最大化原则对我火力分配过程提出了对敌毁伤的相关要求,使命任务达成的根本驱动力即是对敌目标的物理毁伤;剩余战斗力最大化则要求火力分配分案在满足最低目标毁伤要求的前提下,优先考虑弹药充足且毁伤能力相对较弱的武器平台,尽可能保存战斗力;行动时长最小化目标函数则对我火力分配全过程提出主观上的时间约束要求。 联合作战筹划阶段,深入分析作战目的,充分利用敌、我情静态数据,根据战场态势实时构建动态随机时间影响网络模型,据此评估目标价值,生成打击目标清单,结合既往演习演练数据积累,合理划分作战阶段,从而建立如上联合火力打击DWTA模型,并求解得到最优武器目标分配方案:W′={X′(1),X′(2),…,X′(K)}。基于此方案,对敌目标系统迅速实施联合火力打击。若在火力打击第ks(ks=1,2,…,K)阶段发现目标,则快速分析其与现有目标及使命任务的关联关系,将其纳入现有随机时间影响网络,并对后续第ks+1~K阶段进行武器目标再分配。 设新目标系统的数量为N′,则第ks+1~K阶段DWTA问题的数学模型如式(10)所示。 (10) 其中,W′={X′(1),X′(2),…,X′(ks),X″(ks+1),X″(ks+2),…,X″(K)}表示整个火力打击过程各个阶段的武器目标分配方案;j1表示原目标系统中的目标;j2表示新出现的目标;式(10)第一行表示打击目标j的客观空间约束条件;式(10)第2行表示武器平台i在整个作战过程中的武器单元数量约束;式(10)第3行表示武器平台i在一个阶段只能对一个目标进行打击;式(10)第4行和式(10)第5行分别表示原目标系统中的目标和新出现的目标在整个作战过程中可分配的武器单元数量约束;式(10)第6行和式(10)第7行表示在目标j突破武器平台i的火力发射区近界或逃离其火力发射区远界前,必须至少分配一个武器对其进行打击;式(10)第8行表示武器平台i打击目标j需具备的时间条件;式(10)第9行表示联合火力打击行动最大时长约束;式(10)第10行表示指挥员定下的最低使命任务达成概率,体现了指挥员的作战决心。 为验证联合火力打击DWTA模型的可行性和有效性,本文以远程精确对海打击行动为例,进行仿真对比实验。 想定如下,蓝军与红军发生冲突,红军需在两小时内对蓝军信息指挥链路进行远程精确打击,在两小时内,最多组织4个打击波次完成联合火力打击行动,且要求毁瘫蓝军通信体系至少70%以上,任务完成概率最少在60%以上。红方具有5个火力单元Wi(i=1,2,…,5),分别配备不同的弹型,火力资源编组如表1所示,目前探测到蓝军目标21个,假设目标的航路捷径、航向角、速度保持不变,基准概率均为0.1。 表1 红方火力资源编组 作战筹划阶段,红军首先确定目标毁伤概率函数y=fj(Z)(j=1,2,…,21),计算各目标到达各武器平台发射区近界、远界的时间,分析目标间的相互影响关系,确定物理目标层STIN的网络结构,并确定各连边随机时间延迟和时延可变强度等参数,构建物理目标层STIN;同步分解使命任务节点Mis得到效果节点E1、E2和E3,并给出与其相对应的物理目标节点,假设使命节点和效果节点的初始基准概率均为0;而后由专家指定使命节点与效果节点、效果节点与效果节点以及效果节点与其对应的目标节点之间的随机时间延迟和时延可变影响强度,构建使命任务层STIN,并通过融合物理目标层STIN和使命任务层STIN,得到物理目标能力丧失和使命任务达成概率之间的STIN模型;最后围绕达成作战目的,依据上述构建的STIN模型精心选出7个打击目标,待打击目标Tj(j=1,2,…,7)与顶层使命任务Mis之间的远程精确对海打击STIN如图1所示,连边属性如表2所示。 对于任一火力分配方案X(k)(1≤k≤4),使命达成效果均随时间动态变化,根据网络结构规模,本文选取使命节点第15个时间阶段的随机信度序列,作为火力分配方案的使命达成效果值,即使命任务达成概率。根据上述分析,引入指挥员主观决策意愿,取α1=0.8,α2=0.1,α3=0.1,依据式(10)构建远程精确对海打击DWTA模型,采用文献[23,25]中的概率传播算法,用软件进行求解,得最优火力分配方案如表3所示,使命节点随机信度序列如表4所示。 图1 远程精确对海打击随机时间影响网络 表4 使命节点随机信度序列 为检验模型的有效性,分别取加权系数为α1=0.4,α2=0.6,α3=0、α1=0.4,α2=0,α3=0.6和α1=0.6,α2=0.2,α3=0.2进行仿真对比实验,实验结果分别如表5、表6和表7所示。 表5 最优火力分配方案(α1=0.4,α2=0.6,α3=0) 表6 最优火力分配方案(α1=0.4,α2=0,α3=0.6) 表7 最优火力分配方案(α1=0.6,α2=0.2,α3=0.2) 对比表3、表5和表6,使命达成概率效用函数值可知,过度关注追求剩余战斗力最大化和行动时长最小化,可能导致出现对敌打击不充分的情况;对比表3和表7可知,两者使命达成概率效用函数值相差并不大,说明过度追求使命达成概率最大化有可能出现饱和打击或过度打击的情况;由此说明,该模型确能有效反映三个目标函数对指挥决策过程的影响。 为进一步检验模型的有效性,作战实施阶段,取α1=0.6,α2=0.2,α3=0.2对应的最优火力分配方案对敌目标系统实施联合火力打击,打击过程中敌目标随机出现,一旦出现新目标,立即分析其与现有目标节点、效果节点以及顶层使命任务节点之间的关联关系,快速重构联合火力打击STIN模型,并依据式(10)重建联合火力打击DWTA模型,为下一阶段DWTA过程做好准备。假设火力打击第2阶段发现新目标T8,其对目标节点T3和效果节点E1分别起促进作用,并且节点间影响强度如表8所示,求解得到第3阶段最优武器目标分配方案如表9所示,使命节点随机信度序列如表10所示。 表8 T8与T3、E1之间的影响强度 表9 最优火力分配方案(α1=0.6,α2=0.2,α3=0.2) 表10 使命节点随机信度序列 由表7和表9可知,在发现高价值目标T8后,DWTA模型迅速调整下一阶段打击计划,在补充打击上阶段价值相对较高目标的前提下,集中优势火力重点打击新目标,取得了更好的打击效果,使命达成概率效用函数值提升11.2%。实验结果表明联合火力打击DWTA模型能够有效处理新目标的随机出现,再一次验证了模型的可行性和有效性。 本文以联合火力打击动态武器目标分配问题为应用背景,针对现有DWTA模型在描述时间因素对WTA过程的影响,以及量化评价目标毁伤对使命任务的支撑效果这两个方面存在的不足,引入时间窗概念,基于随机时间影响网络的理论和方法,实现了联合火力打击DWTA问题使命达成目标函数的非解析表达。综合考虑使命达成概率最大化、剩余战斗力最大化、行动时长最小化原则,从主观和客观、时间和空间、对敌和对我等多个角度全面深入分析DWTA问题约束条件,构建了联合火力打击DWTA问题的约束满足问题模型,并结合远程精确对海打击作战案例,通过仿真对比实验检验了方法的可行性和有效性。1.4 数学模型构建

3 仿真及验证






4 结束语
猜你喜欢
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
中学生数理化(高中版.高考数学)(2022年3期)2022-04-26
政工学刊(2021年8期)2021-07-31
中学生数理化·高三版(2021年3期)2021-05-14
中学生数理化·高三版(2021年3期)2021-05-14
政工学刊(2021年4期)2021-04-13
房地产导刊(2020年7期)2020-08-24
航空发动机(2020年3期)2020-07-24
汉语世界(The World of Chinese)(2019年3期)2019-07-01
数学大王·趣味逻辑(2019年5期)2019-06-13