固定辙叉区心轨轨顶降低值优化设计方法
2020-12-18 05:51汪徐江
同济大学学报(自然科学版) 2020年11期
沈 钢,汪徐江
(同济大学铁道与城市轨道交通研究院,上海201804)
道岔作为轨道结构的薄弱环节,运用维护工作量大,一直以来给铁路工务带来极大困扰。固定辙叉式道岔虽然允许通行速度较低,但是由于其成本低廉却被广泛运用于普速干线、货运专线以及地铁、轻轨等城市轨道交通线路上,保有量极大。由于固定辙叉有害空间的存在,列车通过岔区时往往产生剧烈的轮轨冲击振动,甚至出现脱轨等事故。因此,如何通过优化固定辙叉的结构型式,改善岔区的结构不平顺,对降低列车过岔的轮轨冲击、提升列车过岔的安全性和延长道岔的使用寿命具有重要意义。
目前,国内外许多学者对固定辙叉进行了大量研究。Sun 等[1]利用 SIMPACK 软件建立了列车通过固定辙叉的动力学模型,分析了列车直向和侧向过岔时的轮轨动态作用。Kassa 等[2]利用软件DIFF3D 建立了轮岔接触有限元模型,分析了较大频率范围内的轮岔动态相互作用。赵卫华[3]建立了车辆道岔耦合动力学模型,分析比较了固定辙叉各结构设计参数对轮轨接触几何关系的影响规律,明确了固定辙叉结构设计参数的重要性及合理取值范围。曹洋等[4]基于岔区轮轨接触参数提出了心轨降低值的选取和评价方法。徐井芒等[5]在分析固定辙叉损伤规律的基础上,提出了基于轮轨廓形净差值比的固定辙叉优化设计方法。Wan等[6]同时对心轨顶面宽度和降低值进行了多目标优化设计,获得了较好的轮轨接触性能。张鹏飞等[7]以12号固定辙叉为例深入分析了不同翼轨加高方案下的列车过岔动力特性,指出合理的翼轨加高设计有利于提高列车的过岔速度。
固定辙叉区的心轨轨顶降低值对于车辆过岔的轮轨动力性能和安全性具有重要影响。为了改变以往反复试凑而后动力学校验的传统设计方法,本文将根据固定辙叉区的轮轨接触关系,提出一种固定辙叉区心轨轨顶降低值的闭环设计方法,并以某地铁列车通过12 号固定辙叉为例对心轨轨顶降低值进行优化设计,比较优化前后轮对经过岔区的走行特征和轮轨动力性能。
1 固定辙叉区轮轨静态接触关系
在理想情况下,列车在直线线路上稳定运行时,轮轨接触点的位置不变,轮轨蠕滑力也保持恒定不变,此时轮对不会出现明显的横移和浮沉趋势。而当列车直逆向通过固定辙叉区时,由于固定辙叉特殊的结构形式,即使没有外界激扰,轮轨接触点的位置也会随着辙叉纵向不断发生变化,这种固定辙叉区的结构不平顺特性使得辙叉区的轮轨接触关系非常复杂。
辙叉区的轮轨接触参数是评价轮轨接触优劣的重要指标,对于辙叉区的结构优化设计具有重要指导意义。图1 为12 号固定辙叉的平面示意图,辙叉趾端距离理论尖端为2 038 mm,辙叉跟端距离理论尖端为3 954 mm,车辆直逆向过岔时的行驶方向如图所示。
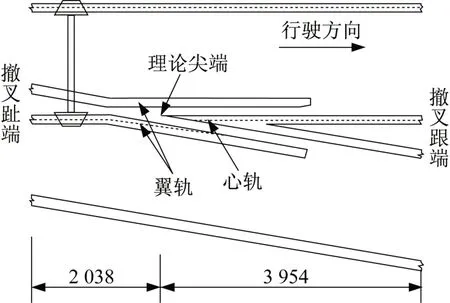
图1 固定辙叉区示意图(单位:mm)Fig.1 Plan diagram of turnout crossing (unit:mm)
本文以LM型踏面和12号固定辙叉为例进行了辙叉区自理论尖端到心轨顶面宽度为50 mm处的轮轨接触计算。不同横移量下,辙叉侧接触点的横向坐标和垂向坐标(以无横移量时的轮对质心位置为坐标原点,横向以轮对行驶方向的右侧为正,垂向向上为正)、轮对侧滚角、轮对质心垂向位移等接触随辙叉纵向的变化趋势分别如图2所示。
从图2a 和图2b 可以看出,当轮对的横移量为0时,轮对自理论尖端行至心轨顶宽20 mm断面处时,接触点的横向坐标随着翼轨的不断向外弯折从约780 mm 逐渐增大至距离轮缘最远处的800 mm 附近,滚动圆半径也逐渐减小至416 mm左右。轮对行至心轨顶宽20 mm后,由于辙叉区的结构不平顺,接触点的横向坐标由800 mm 瞬间减小至725 mm,滚动圆半径也瞬间增大至422 mm 左右。所以当列车直逆向通过辙叉区时,轮对经过辙叉咽喉部位后首先与翼轨接触,并且轮轨接触点随着翼轨的向外弯折不断向远离轮缘侧移动,直至轮对开始与心轨接触时,轮轨接触点逐渐转移至轮缘侧。轮载在心轨顶宽20 mm 断面处前基本由翼轨承载,在心轨顶宽20 mm 断面处后逐渐转移至心轨上,若轮对受到外界激扰导致轮对横移量较大时,可能会出现心轨提前承载或滞后承载的情况。
从图2 c和图2d可以看出,由于辙叉区结构不平顺的存在,轮对侧滚角和轮对质心的垂向位移在轮对无横移时并不为0,且均在接触点从翼轨跳跃至心轨时达到最小幅值,之后又随着心轨的不断抬升逐渐增大,但总体数值很小。若轮对横移量较大时,轮轨发生轮缘接触,则轮对侧滚角和轮对质心垂向位移则会随轮对横移量大幅度增加。
根据辙叉区的轮轨接触特征,心轨轨顶降低值直接导致辙叉区心轨顶面的整体沉降,对于辙叉区的轮轨关系影响很大,心轨轨顶降低值和翼轨加高值的不合理匹配将直接导致轮轨接触点的大幅度跳跃现象,从而恶化辙叉区的轮轨接触性能,对于心轨轨顶降低值的优化应该侧重于心轨顶宽20 mm断面至50 mm断面。
2 优化模型及求解算法
2.1 优化模型
列车通过固定辙叉区的轮轨动力性能与辙叉区的钢轨廓形、翼轨与心轨的合理匹配密切相关,本文的研究工作旨在给出一种与已知翼轨匹配最佳的心轨轨顶降低值优化设计方法。
图3 所示为辙叉区心轨布置平立面示意图,其中断面A 为理论尖端,断面B 和断面H 的心轨顶宽分别为20 mm 和50 mm,自心轨顶宽20 mm 至心轨顶宽50 mm每隔5 mm设置一个断面,则心轨可由以上共计8 个关键断面插值生成[8]。设断面A 与断面H 的心轨轨顶降低值分别为固定值hA和hH,断面B至断面G共计6个断面的心轨轨顶降低值为可变值hk,k=1,2,…,6,则通过调整这6个断面的心轨轨顶降低值,可以得到一系列完整的心轨廓形。

图2 固定辙叉区的轮轨接触特征Fig.2 Wheel-rail contact characteristics of turnout crossing
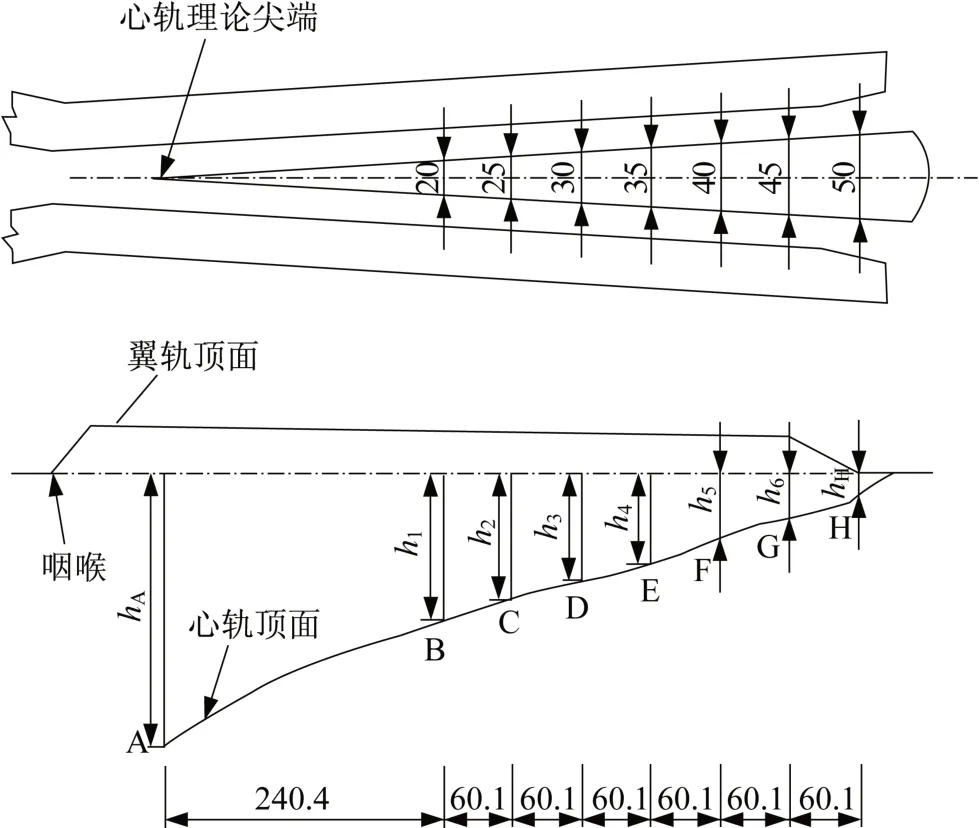
图3 辙叉区心轨布置平、立面示意图(单位:mm)Fig.3 Plan and elevation diagram of crossing nose(unit:mm)
为了改善心轨的受力状况,降低列车通过固定辙叉区的轮轨冲击,本文选用辙叉侧和基本轨侧的轮轨力作为心轨轨顶降低值合理与否的评价指标,则优化模型的目标函数可确定为以下形式:
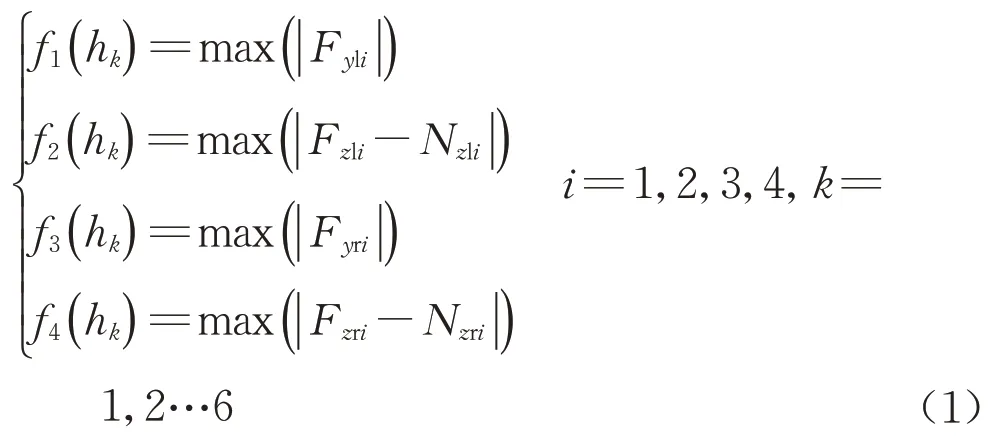
式中:i表示车辆的4个轮对;Fyli和Fyri分别为基本轨侧和辙叉侧的轮轨横向力;Fzli和Fzri分别为基本轨侧和辙叉侧的轮轨垂向力;Nzli和Nzri分别为基本轨侧和辙叉侧在车辆稳定运行时的轮轨垂向力;f1为基本轨侧轮轨横向力的最大值;f2为基本轨侧轮轨垂向力的波动最大值;f3为辙叉侧轮轨横向力的最大值;f4为辙叉侧轮轨垂向力的波动最大值。
对以上4 个函数根据重要程度进行加权处理,可得到最终的优化目标函数为

式中:ωi分别为对应函数的加权系数,i=1,2,3,4。
心轨顶面高度逐渐升高直至与基本轨面平齐,为了保证心轨顶面的平顺性,心轨顶宽各断面的降低值应是单调递减的,给定约束条件:

由于心轨顶宽20 mm断面处的降低值过小可能会造成心轨的提前承载,此时心轨顶宽较小,承载能力不够,很容易造成心轨的伤损,因此应根据心轨的材料、强度、承载能力以及轮轨静态接触计算设定极限最小降低值hmin,则心轨顶宽20 mm断面的降低值应满足以下约束条件:

优化后的心轨应该保证列车通过固定辙叉区的安全性,辙叉侧和基本轨侧的脱轨系数和轮重减载率应满足以下约束条件:
心轨轨顶降低值的优化模型可以定义如下:
目标函数为

约束条件为
2.2 求解算法
由于粒子群(PSO)算法具有较快的计算速度和较好的全局搜索能力,本文采用粒子群算法求解式(7)~(8)所述优化模型。粒子群优化算法是一种基于群体智能的随机搜索算法,其将每一个可行解都抽象为一个没有质量和体积的粒子,根据一定的飞行规则在目标空间中搜索,并通过种群间粒子的合作和竞争求解复杂的优化问题[9-10]。
根据粒子群算法,在D维的目标搜索空间中,有N个粒子组成群落,设第i个粒子的位置和飞行速度分别表示为

将第i个粒子搜索到的最优位置和整个群落搜索到的的最优位置分别记为
在找到目标解前,所有粒子根据式(13)进行迭代更新下一时刻的速度和位置:

式中:c1和c2为加速常数;r1和r2均为[0,1]范围内的均匀随机数;hij为每个粒子的位置,vij表示每个粒子的飞行速度,为了限制粒子的飞行速度,约定:为惯性权重,权重越大,则全局收敛能力越强,局部收敛能力则越弱;pij为当前每个粒子的最佳位置;pj为当前种群的最佳位置;t为当前迭代次数。
为了使算法能够有更好的全局最优搜索能力,在搜索过程中需对惯性权重ω按式(14)进行动态调整:

式中:Tmax为最大迭代次数;ωmin为最小惯性权重;ωmax为最大惯性权重。
采用粒子群算法求解心轨轨顶降低值最优解的具体流程如图4所示。
由图4 可知,优化流程首先需要设置算法的参数,然后根据约束条件随机生成N组心轨降低值,并根据降低后的各心轨断面廓形插值生成完整的心轨廓形,用于车辆通过固定辙叉区的动力学仿真。若仿真结果满足车辆过岔的脱轨安全性指标,则根据适应度函数值的优劣更新个体最优解和全局最优解,然后判定迭代是否终止,若当前迭代次数已达到最大迭代次数,则输出优化结果。若当前迭代次数未达到最大迭代次数或者不满足脱轨安全性指标,则根据式(13)计算得到新的N组心轨降低值,整个优化过程在闭环中不断迭代直至获得最优的各断面心轨降低值。
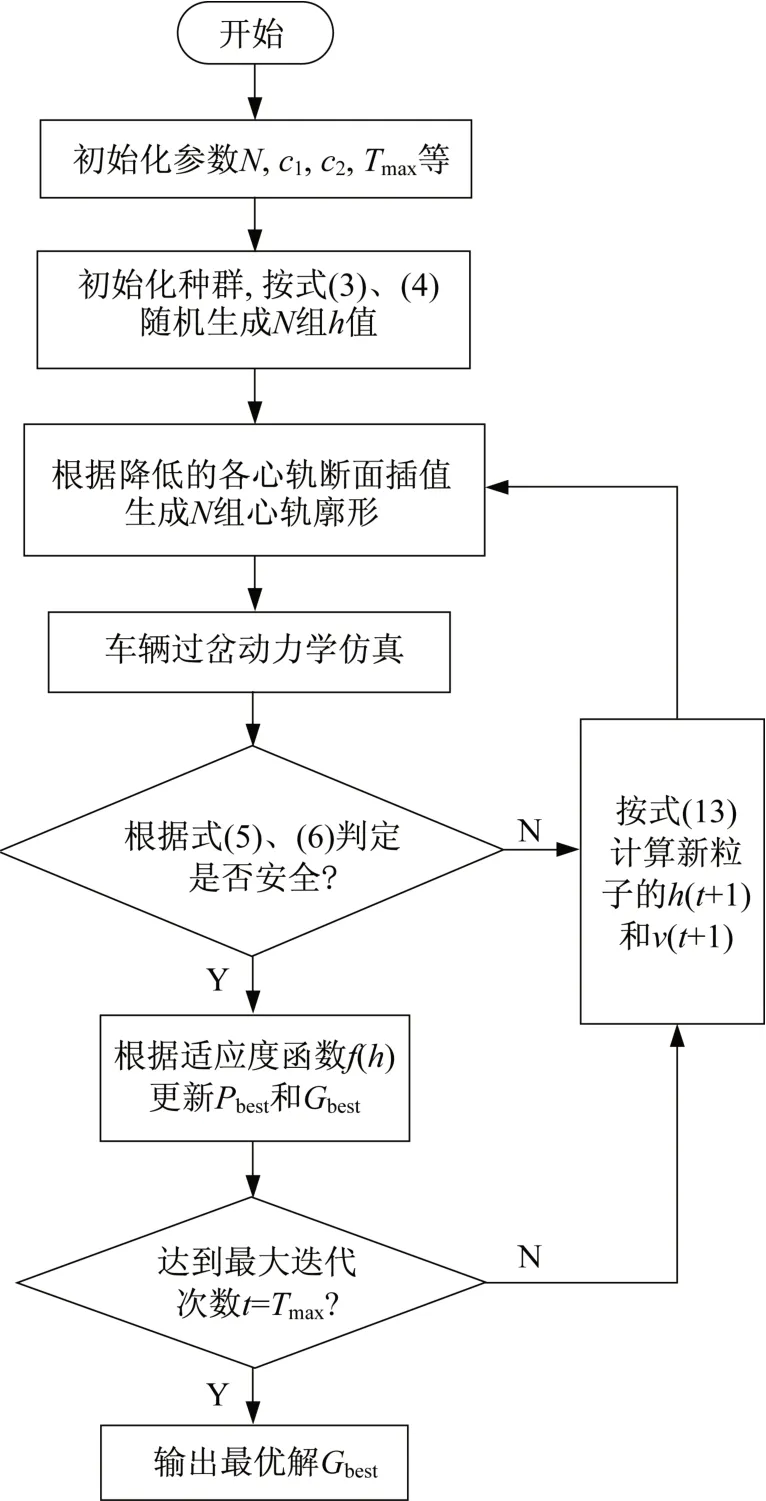
图4 优化算法流程图Fig.4 Flowchart of optimization algorithm
3 算例
为了验证图4所述心轨轨顶降低值优化策略的有效性,以某轴重为14 t、行驶速度为40 Km·h-1的地铁车辆直逆向通过12号固定辙叉为例,对心轨轨顶降低值进行了迭代优化。为了提高算法的迭代速度和求解效率,本文采用自编程序搭建了车辆通过固定辙叉区的动力学模型,并对动力学模型进行了适当的简化,假设轮对始终不与钢轨脱离接触且轮轨接触采用刚性算法[11]。在优化模型中,各优化函数fi(hk)的数量级相同且同等重要,因此加权系数ωi可均取为1。固定断面的降低值可根据道岔参数手册设置为:断面A 降低值hA=6,断面H 降低值hH=0,断面 B 最小降低值hmin=2[12]。粒子群算法的各项参数选取为:种群规模N=10,种群维数D=6,加速常数c1=c2=1.5,粒子最大飞行速度vmax=1,最小惯性权重ωmin=0.4,最大惯性权重ωmax=0.8,最大迭代次数Tmax=100[13]。
图5 为应用上述优化算法对心轨轨顶降低值进行迭代优化的适应度曲线,表征了算法的收敛过程,由此可见,该优化设计方法能以较低的迭代次数便可得到合适的输出结果,并趋于稳定。
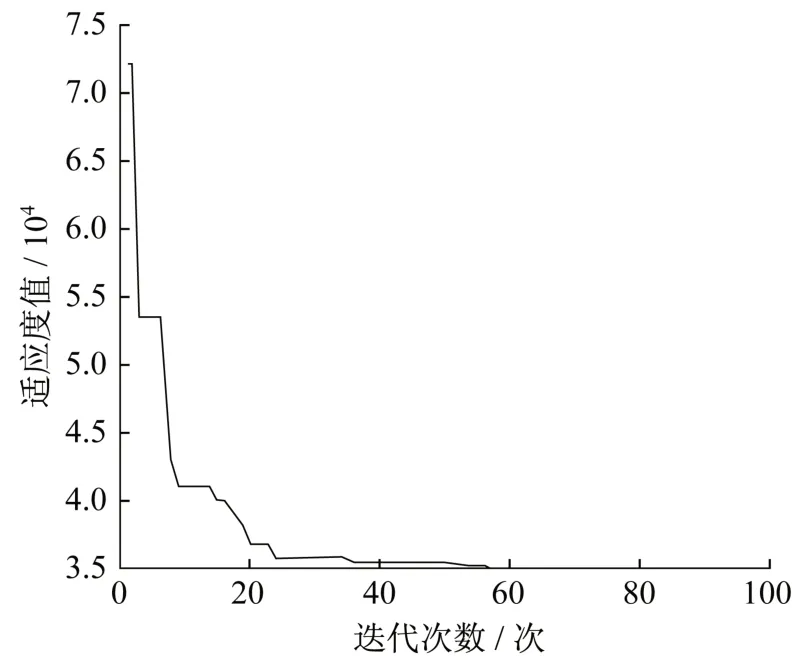
图5 适应度进化曲线Fig.5 Curve of fitness training
迭代完成后,得到各断面的心轨轨顶降低值为Gbest=[4.336 9,2.017 9,1.725 7,1.394 5,0.955 6,0.362 0]
设辙叉趾端基本轨轨顶为轮轨接触点垂向坐标的零点,垂向向上为正,则轮对通过固定辙叉区的接触点垂向坐标变化趋势如图6所示。辙叉区轮轨接触点的垂向坐标变化趋势代表了辙叉区竖向结构不平顺对轮对走行特征的影响,可以看出优化后的心轨廓形使得辙叉区的竖向结构不平顺减小,同时心轨开始承载的断面位置稍有延后,此时承载的心轨顶面较优化前更宽,增强了心轨的承载能力。
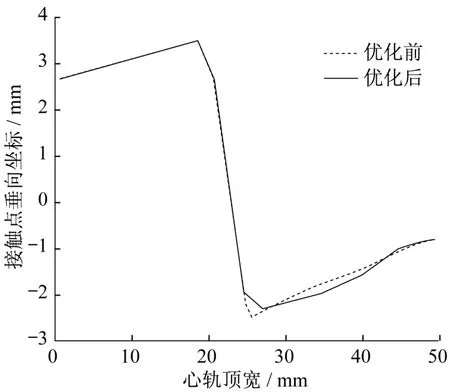
图6 轮轨接触点垂向坐标Fig.6 Vertical coordinate of wheel-rail contact point
车辆通过优化后的固定辙叉区的动力学响应如图7所示。从图7 a可以看出,优化前的辙叉侧轮轨横向力最大值为15.3 kN,优化后约为11.7 kN,下降了23.5%,从图7 b 可以看出优化前的基本轨侧轮轨横向力最大值为9.6 kN,优化后降低为7.3 kN,下降了24%。根据图7c来看,辙叉侧的轮轨垂向力相比优化前有较大降幅,这表明优化后的心轨降低值方案能够减小轮载转移至心轨时的轮轨冲击力。根据图7d,当辙叉侧车轮冲击心轨时,基本轨侧的瞬时减载也稍有减小,从而降低了车辆在辙叉区脱轨的风险。根据辙叉侧和基本轨侧的轮轨力曲线,车辆通过固定辙叉区的轮重减载率和脱轨系数均在安全裕度内。
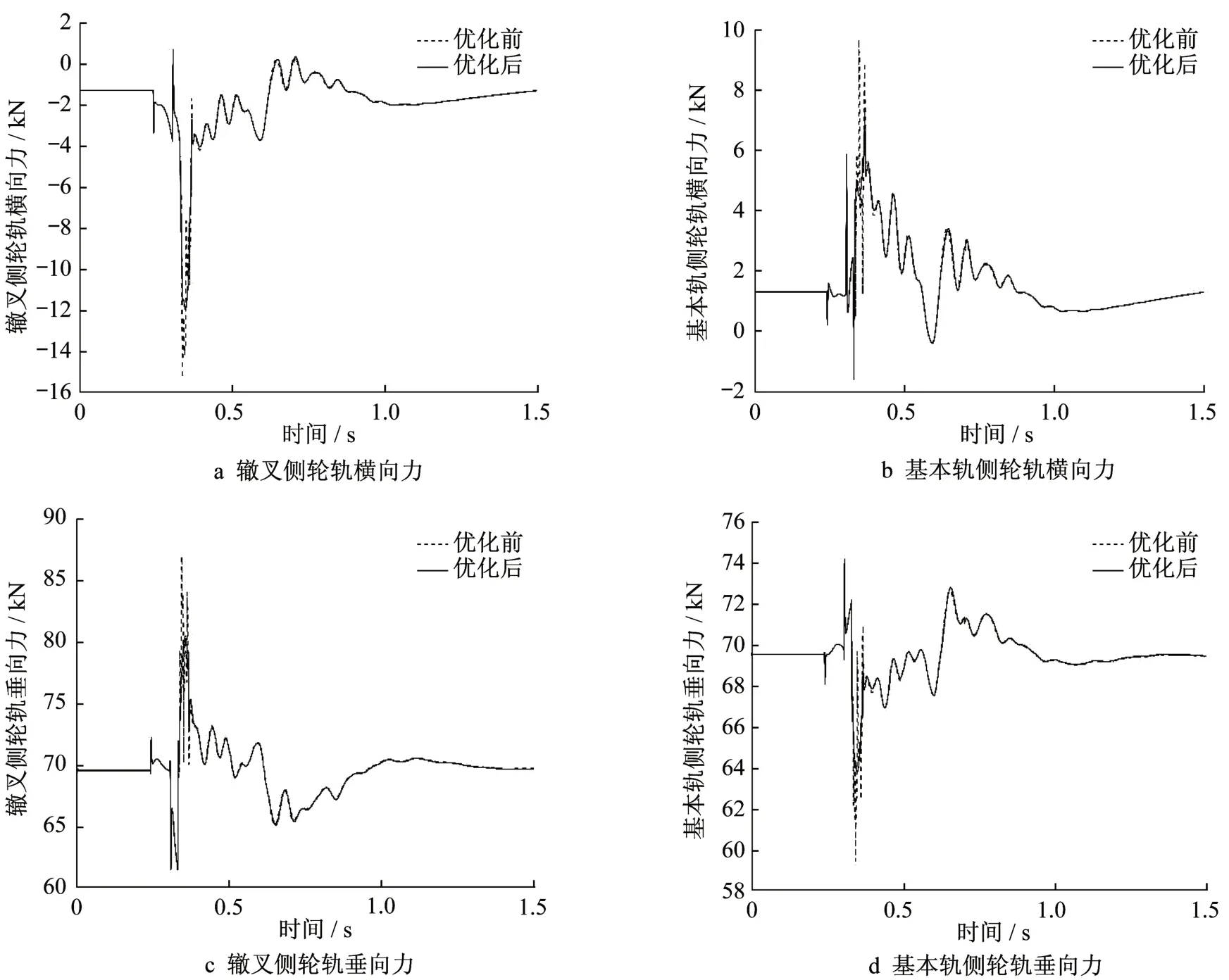
图7 车辆通过固定辙叉区的动力学响应Fig.7 Dynamic responses of turnout crossing
4 结语
针对固定辙叉区心轨受力状况差、寿命短等问题,本文提出了一种心轨轨顶降低值的优化设计方法,该方法能够根据岔区的钢轨廓形、翼轨加高值以及踏面廓形快速设计出与翼轨匹配较优的心轨轨顶降低值方案,从而改善辙叉区的轮轨接触关系,降低车辆过岔的轮轨接触力。研究结果表明,本文所提出的优化设计方法适应性广,收敛速度较快,能够为固定辙叉的优化设计提供一定的理论依据。
猜你喜欢
昆明医科大学学报(2022年1期)2022-02-28
轮胎工业(2021年5期)2021-12-26
新疆钢铁(2021年1期)2021-10-14
西部交通科技(2021年9期)2021-01-11
润滑与密封(2020年9期)2020-10-10
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
铁道通信信号(2020年10期)2020-02-07
润滑与密封(2019年11期)2019-11-27
润滑与密封(2019年11期)2019-11-27