
考虑前方多车优化速度信息的车辆跟驰模型
2020-12-22 09:12安树科徐良杰钱良辉陈国俊
东南大学学报(自然科学版) 2020年6期
安树科 徐良杰,2 钱良辉 陈国俊
(1武汉理工大学交通学院,武汉 430070)(2湖北文理学院汽车与交通工程学院,襄阳 435003)(3西南林业大学继续教育学院,昆明 650224)
近年来,在我国许多大中城市交通拥堵问题变得日趋严重,因而如何从交通流运行机理角度缓解拥堵引起了广泛关注.为了揭示交通拥堵的产生条件与作用机理,国内外学者根据车辆相互作用关系建立了各类交通流模型.交通流模型可以描述车辆跟驰过程的相互作用力及其作用强度,此类模型的提出为交通拥堵的机理解析和稳定性调控提供了方法.常用的交通流模型根据模型结构一般分为:分子动力学模型、元胞自动机模型和车辆跟驰模型等[1-4].
车辆跟驰模型从动力学角度分析了前后车辆之间相对速度和车头间距的传递关系,具有较强的可解释性,其中,Newell模型被广泛认为是车辆跟驰模型的研究基础[5].Bando等[6]进一步解决了Newell模型中存在的不合理加速度问题,因而其所述优化速度 (optimal velocity, OV) 模型能够更好地拟合实际交通流.Helbing等[7]发现OV模型在车辆启动过程中存在速度滞后的问题,因而在其广义力 (general force, GF) 模型中进一步考虑了负向速度差.此外,通过实测数据分析发现,GF模型中存在车头间距小于安全间距且后车不会减速的问题,因而Jiang等[8]提出了改进模型,即全速度差 (full velocity difference, FVD) 模型.基于OV模型框架结构,学者们提出了各类考虑驾驶员特性和道路环境的改进模型[9-13].由于此类交通流模型具有较高的平滑性,因而可以通过线性稳定性分析和非线性波动方程分别从微观和宏观角度揭示交通流的传播特性.
相较于传统车辆,智能网联车能够通过车路协同技术 (vehicle-infrastructure cooperation technology, VICT) 实现车辆与车辆、车辆与路侧设备之间的短程通讯,拓展了车辆的感知信息,因而有望改善交通流的运行环境.Ge等[14]基于智能交通系统引入车辆的后视效应,提出了改进车辆跟驰模型,研究结果表明相邻后车速度信息会对交通流的稳定性产生影响.Yu等[15]基于FVD模型,考虑相邻车辆加速度差的影响,建立了改进跟驰模型,在一定程度上提高了车辆抗扰动能力.周桐等[16]基于智能交通系统考虑了多车稳态期望速度效应,建立了拥堵抑制跟驰模型,进一步增强了交通系统的稳定性.Jiang等[17]通过对25辆车的实车测试发现,在道路系统中微小的速度波动就会引起较大的车头间距波动.另外,韩祥临等[18]将周围其他车辆的速度差信息引入至车辆跟驰模型中,进一步补充了驾驶员的决策信息.
基于VICT,已有研究考虑了后车速度、相邻车辆加速度差、多前车稳态期望速度等信息对车辆跟驰的影响,在一定程度上抑制了交通拥堵.王祺等[19]研究发现,宏观交通流具有较大的随机性和波动性,即同一局部密度可能对应着多种短时局部速度,且随着局部密度的变化,局部速度服从不同类型的分布.在微观层面局部车辆车头间距的变化也将会以交通波的形式向交通流上游传播,进而影响后方车辆的行驶速度,因而有必要探讨多前方车辆车头间距的变化对交通流稳定性的影响.本文基于车头间距反馈构建了考虑多前车优化速度信息的改进车辆跟驰模型,并引入动态速度差反馈系数,最后采用数值仿真方法验证了多前车优化速度和速度差信息对交通流稳定性的影响.
1 跟驰模型与稳定性分析
1.1 改进跟驰模型
Jiang等[8]提出的FVD模型克服了OV模型和GF模型在速度差过大时,存在车头间距较小导致车辆碰撞的安全隐患问题,其模型描述如下:

(1)
式中,α为驾驶员敏感度系数,其取值一般为驾驶员反应延迟的倒数;xn(t)为车辆n在t时刻的位置;vn(t)为车辆n在t时刻的速度;λ为速度差反应系数;Δxn(t)为车辆n在t时刻与前车n+1的车头间距;Δvn(t)为车辆n在t时刻与前车n+1的速度差;V(Δxn(t))为车辆n在t时刻的优化速度,即
(2)
式中,Vmax为路段最大限制速度;hc为安全车头间距.
在实际交通流中,驾驶员由于视觉范围的限制只能获得相邻车辆的状态信息,前方交通流状态信息的缺失导致交通流抗扰动能力较弱.考虑到VICT完全信息可达性的特点,跟驰车辆可以提前对前方交通流状况做出反应,在一定程度上提高了交通流的稳定性.如图1所示,假设N+2辆车均匀分布在单车道道路上,其中尾车n的通信车辆数为R,且其获得车头间距数为N.R值大小随着通信范围内车辆数改变而变化,且R≥N,即跟驰车辆获得车头间距数最多为当前状态下的通信车辆数.此时,车辆n可以通过车车通信获得前方N辆车的车头间距信息,因而本文提出了一种基于车头间距反馈的交通流系统.考虑在跟驰理论中一般假设确定的车头间距对应唯一的最优行驶速度,本文基于上述交通流系统提出了一种考虑多前车优化速度信息的改进车辆跟驰模型,即

(3)
式中,k为车辆n前方第k辆车,k∈[1,N];aN为车辆n的敏感度系数,其取值大小与参数N的大小有关;βk为车辆n对其前方第k辆车的关注程度,其中β1+β2+…+βN=1;Δxn+k-1(t)为车辆n+k-1在t时刻与其相邻前车n+k的车头间距.
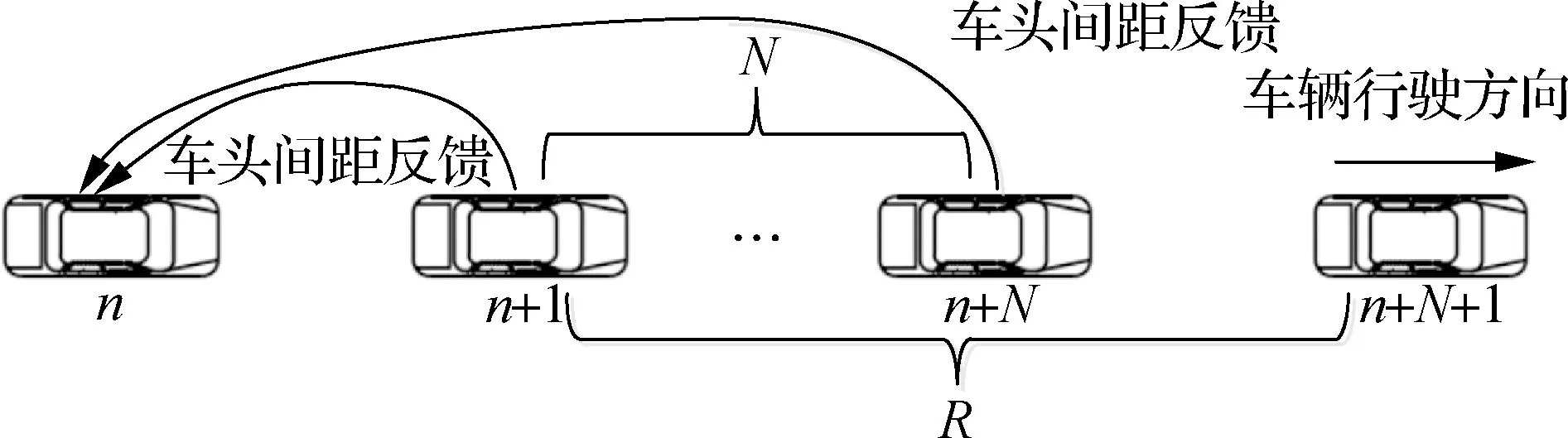
图1 基于车头间距反馈的交通流系统
该模型基于车头间距信息,分别获得了前方各车的优化速度,进而得到车辆n的综合优化速度.基于以上考虑,在扰动传播至车辆n时已经被部分削弱,降低了其作用强度,在一定程度上起到了抑制交通拥堵的作用.
1.2 线性稳定性分析
为了探究多前车优化速度信息对交通流稳定性的影响,采用Lyapunov第一方法进行了线性稳定性分析并推导了其稳定性条件.从跟驰模型发现,在均质交通流中,若所有车辆以最优速度行驶时,交通流达到稳定状态.假设车辆的车头间距均为b,相应的优化速度为V(b),此刻交通流的车辆位置解为
(4)
考虑对均质流位置解式(4)添加位置扰动yn(t),可得
(5)
将添加扰动后的交通流系统进行线性化,结果如下:

(6)

对式(6)进行泰勒展开,并令yn(t)=eiαkn+zt,可得

(7)
式中,αk为转换系数,其可以将交通流系统转换至频率域;z为由振幅和角频率组成的复数.
令z=γ+ωi,代入式 (7) ,得

(8)
令γ=0,且式(8)的实部和虚部分别为零,则

(9)
其中

在αk→0处应用洛必达法则和等价无穷小代换,得到临界稳定条件
(10)
当N=1时,仅考虑本车与相邻前车的车头间距,所提出的模型转换为FVD模型,其稳定条件为
(11)
当N≥2时,稳定条件为
(12)
从式(12)可以看出,随着获得车头间距数N的增加,不等式右侧数值越大,说明所述模型中考虑前车数量的增多扩大了其稳定区域,因而所提出的模型相比传统FVD模型能够提高交通流的稳定性.
1.3 反馈控制策略
由于驾驶员视觉感知存在差异,前车同尺度的扰动或速度变化在不同车头间距条件下对后车的作用强度存在差异性.本文基于王涛等[20]提出的多速度差反馈控制策略,进一步引入了动态速度差反馈系数,车辆跟驰模型式(3)转化为
(13)
式中,M为车辆n获得速度差数,且R≥M;r为车辆n前方第r辆车,r∈[1,M];λr为车辆n对速度差Δvn+r-1(t)的反应系数,Δvn+r-1(t)=vn+r(t)-vn+r-1(t);ξr=hc/Δxn+r-1为车辆动态速度差反馈系数,其与车头间距和安全间距hc有关.
2 数值仿真
本节通过数值仿真的方法分别对稳定交通流施加单次和多次扰动,以验证多前车优化速度信息和速度差信息对交通流稳定性的影响.假设共有Q=100辆车行驶在无超车行为的开放边界道路上,其中头车V100不受其他车辆影响.根据Zheng等[21]给出的交通流仿真参数,仿真系统中车辆的最大速度Vmax=20.5 m/s,安全车头间距hc=7.02 m,仿真采样时间ts=0.1 s,车辆初始速度v0=20 m/s.驾驶员相关仿真参数的取值与其反应时间和车路协同系统的通信延迟有关,因而已有跟驰模型的参数取值存在较大差异性.Jiang等[8]通过实测数据对FVD模型相关参数进行了标定,其中α=0.41 s-1,λ=0.5 s-1.相比于FVD模型,王涛等[20]进一步提出了多速度差(multiple velocity difference,MVD)模型,并根据驾驶员对前方各车辆的关注程度不同给出了以下参数取值:α=1.413 7 s-1,λ1= 0.2 s-1,λ2=0.15 s-1,λ3=0.1 s-1.此外,Zhu等[22]认为不同类型驾驶员的敏感度系数存在差异,因而分别讨论了α取值为0.85、1.25、1.65和2.05 s-1时交通流的稳定性情况.为了仿真方便,本文不考虑驾驶员相关参数变化对实验结果的影响,假设驾驶员具有统一的敏感度系数,即aN=1.7 s-1;速度差反应系数依据MVD模型统一为λr=0.15 s-1;同理,假设驾驶员对多前车车头间距关注程度一致,因而βk=1/N.此外,为了进一步证明所述改进模型的有效性,引入了MVD模型进行对比实验.
车辆的初始位置及编号如下:
xn(0)=nρn∈[1,Q]
(14)
式中,xn(0)为初始时刻车辆n的位置;ρ为路段初始密度;Q为总的车辆数.
2.1 单次扰动影响
为了验证所述改进跟驰模型在单次扰动情况下对交通流稳定性的影响,令头车V100在100~102 s时间段内突然停止,图2给出了不同情况下跟驰车辆的驾驶行为.图中,xn为车辆n的位置,xQ-xn为车辆n与首车的相对位置.
图2(a)、(b)、(c)显示了当获得车头间距数N分别为 1、2和3且获得速度差数M=1时,改进模型各车辆的时空斑图和瞬时速度.对比不同条件下的车辆时空斑图可以发现,随着N值的增大,外部扰动波传播导致的交通拥堵程度逐渐降低,且扰动的作用距离和作用时间均有所减少,交通流可以在较短的时间内恢复至无拥堵状态.对比N分别为 1、2和3时各车辆的瞬时速度可以发现,随着N值的增大,车辆V70和V50的停滞时间逐渐缩短,并通过速度调整逐渐消除或减弱了交通流扰动.当N=3时,车辆V70和V50将不再发生停滞现象.
图2(d) 显示了当N=2且M=2时,改进模型各车辆时空斑图及车辆V100、V70和V50的瞬时速度图.通过对比图2(d)和图2(b)发现,当N值一定时,进一步引入多前车速度差信息可以减小单次扰动对交通流的作用范围.此外,通过引入速度差信息,车辆速度震荡幅度有所降低,且通过统计分析发现,各车辆的扰动平均作用时间降至3.63 s.可以认为,当通信车辆数不变时,通过拓展跟驰车辆的信息维度能够进一步提高交通流的稳定性.
图2(e)显示了当R=2时,MVD模型的时空斑图及车辆V100、V70和V50的瞬时速度图.对比图2(a)、(b)、(e)发现,当通信车辆数相同时,虽然MVD模型和所述模型均能降低扰动的作用范围,但是所述模型在抑制拥堵和提高交通流稳定性方面更具优势.此外,统计发现,MVD模型中各车辆的扰动平均作用时间为5.21 s.因而,相比于MVD模型,所述改进模型中扰动作用时间减少了约30.3%.
2.2 多次扰动影响
在实际道路上,交通流扰动可能是连续且多次的,因而本节考虑头车V100在100~103、120~123、140~143、160~163 s四个时间段突然停止,以模拟多次扰动对交通流的影响,并分析各车辆的跟驰行为.
图3显示了N=1时不同M值情形下车辆V100和V1的瞬时速度.对比分析图3(a)、(b)、(c)可以发现,随着M值的增加,车辆V1的停滞时间出现了交替减少和增加的现象,但车辆的总体停滞时间并无明显变化,因而多前车速度差信息对频繁大尺度扰动交通流的改善效果并不理想.

(a) 时空斑图及各车辆瞬时速度 (改进模型,N=1,M=1)




图4分别显示了M= 1时不同N值情况下车辆V100和V1的瞬时速度.对比图3(a)、图4(a)和图4(b)可以发现,随着N值的增加,车辆V1在多次扰动传播过程中停滞时间逐渐缩短.当N值增至3时,扰动传播至队尾时尾车的停滞时间减少了74.0%,且扰动波的传播速度也相应增加,仅有2次扰动波被传播至V1,极大提高了交通流的稳定性.

(a) M=1

(b) M=2

(c) M=3

(a) N=2

(b) N=3
3 结论
1) 单次扰动作用下,相比于MVD模型,考虑多前车优化速度信息使得扰动作用时间降低了约30.3%,进而提高交通流的稳定性.
2) 当通信车辆数不变时,通过拓展跟驰车辆信息维度能够进一步提高交通流的稳定性.
3) 在频繁大尺度扰动作用情况下,多前车速度差信息对交通流稳定性的改善效果并不明显.
4) 所述多前车优化速度信息可以有效抑制频繁扰动导致的交通流拥堵,且随着参数N增至3时,扰动传播至队尾时尾车的停滞时间减少了74.0%,交通流趋于稳定.
5) 本文假设所有车辆均装有车路协同系统,但是在车路协同系统的应用初期,道路上将存在通讯车辆和常规车辆混行情况,尚需要进一步研究异质流情况下通信车辆反馈控制方法,并探讨通信链路不同对交通流稳定性的影响.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
沈阳理工大学学报(2021年6期)2021-12-30
文萃报·周五版(2021年11期)2021-06-23
军事文摘(2020年24期)2020-02-06
计算机系统应用(2019年6期)2019-07-23
现代电子技术(2009年15期)2009-09-30
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
棋艺(2000年18期)2000-06-14
青年文摘·上半月(1994年6期)1994-01-01
