
双模式外骨骼结构设计与优化
2020-12-23 02:15冯军王卫辰刘兴实文天阳张冰玉黄琪
机械工程师 2020年12期
冯军, 王卫辰, 刘兴实, 文天阳, 张冰玉, 黄琪
(江苏师范大学a.江苏圣理工学院-中俄学院;b.机电工程学院,江苏 徐州221116)
0 引 言
机械外骨骼是一种由金属框架构成的可以提供额外能量以供肢体运动的辅助设备。国外外骨骼的研究始于20世纪60年代,用于增强士兵的举重和携带能力[1]。随着科技水平的进步,2000年以后研究设计了一大批外骨骼系统,以军用、医疗辅助、助力行走等领域为主。军用机械外骨骼主要用于提高士兵的单兵作战能力;医疗机械外骨骼可以帮助行动能力下降和神经受损的病人进行康复训练;民用机械外骨骼主要用于行动不便的老人和残疾人,为其提供辅助行走能力[2]。国内下肢外骨骼多以学术研究为主,2005年前后,国内多家科研院所开展了下肢外骨骼方面的研究,其中具有代表性的有中科院合肥智能机械所、中科院常州先进制造技术研究所、浙江大学、哈尔滨工业大学、电子科技大学等[3]。在工业应用中,铁甲钢拳团队开发的CEXO-01专用于物流行业[4],该产品重约28 kg,可以让普通工人便于背负重达60 kg的物品,满电后可持续运行约4 h。应用压力传感器、无线传导、陀螺仪等技术和仪器,帮助工人减轻负担,减少身体伤害,并大大提高工作效率。为了兼具外骨骼结构的上述优点,同时达到功能多样化的目的,本文设计双模式外骨骼模型,将人体所受力的一部分转移到外骨骼上,以帮助佩戴者降低劳动强度,优化受力部位,提高人体的负重能力。本文首先针对外骨骼的下肢座椅模式和上肢托举模式进行结构设计及有限元分析,然后根据外骨骼的应力和位移分布状况,对整体结构进行优化,期望在满足功能和强度要求的前提下,尽可能减轻外骨骼结构的整体质量。
1 外骨骼模型的结构设计
根据GB 10000-1988《中国成年人人体尺寸》中的数据,取身高为1754 mm、体重为71 kg的人为例,设计外骨骼的结构尺寸。取大腿杆的长度为496 mm,小腿加足高的长度为439 mm。由于人体踝关节距足底的高度并不相同,设计了小腿杆杆长可调节的踝关节结构,其各部件的结构形式和装配关系如图1所示。踝关节调节部位设置牵引轨道,小腿杆连接零件在牵引轨道中定位,实现髋关节高度的调节。小腿杆在连接零件的不同深度固定,实现小腿杆杆长的调节。
通过对人体生理结构与工作模式的分析,初步设计出外骨骼结构模型。外骨骼结构总体由脚支撑结构、踝关节结构、小腿杆结构、膝关节结构、大腿杆结构、齿轮定位结构、万向联轴器结构、髋关节结构等组成,如图2(a)所示。在外骨骼大腿杆中后部设置万向联轴器结构,在其转换到上肢托举工作模式后,可以满足随人体上肢左右摆动的情况,结构如图2(b)所示。齿轮定位机构由齿轮、齿条、插齿结构、支撑轴及双头螺栓等零件组成,结构如图2(c)所示。支撑轴绕小腿杆转动,齿轮绕支撑轴上端的双头螺栓转动,并与齿条相互啮合。沿着支撑轴的轴线方向,手动控制插齿结构的前后移动,插齿可使齿轮停止转动,与支撑轴、大腿杆、小腿杆相互限制,以满足座椅模式的工作状态。
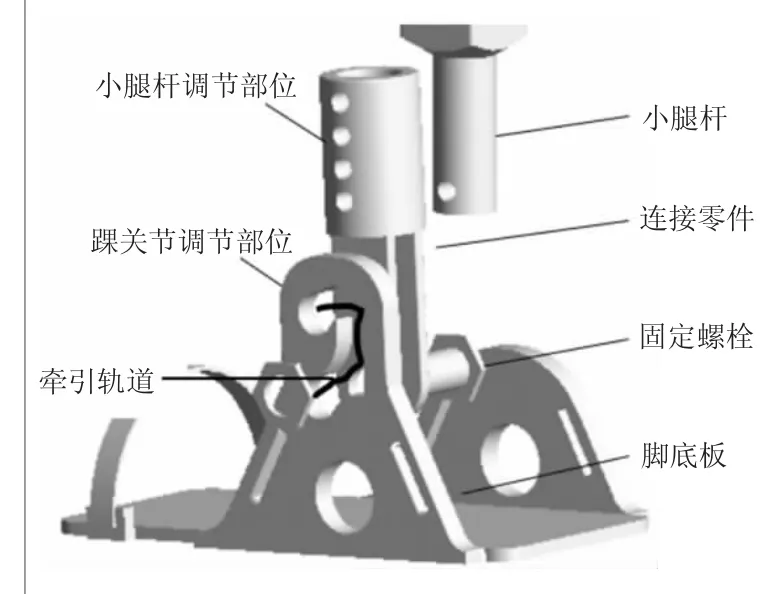
图1 小腿杆杆长可调节的踝关节结构
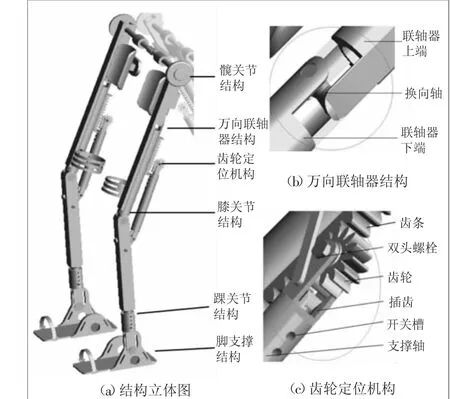
图2 外骨骼外观结构立体图及细节图
2 外骨骼座椅模式和托举模式分析
2.1 外骨骼座椅模式分析
外骨骼座椅可以使佩戴者积极地调动肌肉的力量,而不是被动地坐着,有利于提高劳动持久性。考虑到穿戴者座椅位姿的不同,即膝关节的弯曲程度不同,以及为转换到上肢托举做适应性调整,在膝关节部位追加制动结构,使其具有座椅功能。综合考虑应用齿轮齿条啮合,配合插齿等配套制动结构,满足外骨骼支撑条件,如图2(c)齿轮定位机构所示。齿轮齿条不同的啮合位置满足不同的位姿需求,通过手动操作使插齿与齿轮啮合,从而固定齿轮齿条,起到制动器的目的,实现座椅功能。齿轮定位机构的角度变换示意图如图3所示。
为了方便网格划分、减少计算工作量,对实体座椅模型做如下简化[5]:除去腰部动力装置和各连接绑带,髋关节部位用连杆代替;略去各关节的驱动装置;可调杆件上的螺栓与孔也被简化,以便施加载荷。对外骨骼进行有限元分析的基本步骤为[6]:
1)定义材料属性为6061A铝合金,设置密度为2700 kg/m3。
2)在Pro/E中建立模型并导入ANSYS中。
3)采用整体网格对各个零部件进行网格划分,网格精度为0.01m。
4)施加约束和载荷。脚底板是与地面相接触的部分,脚底板及踝关节采用全约束,所有的关节都锁死不会发生相对运动,外骨骼所承受的质量约为80 kg,即在模型中加载784 N垂直向下的均布载荷。
5)使用Von-Mises静态分析算法分析外骨骼位移变化和应力变化,得到位移云图、应力云图,如图4所示。
由图4可以看出外骨骼不同部位所受应力与位移情况,以及不同部位应力与位移的变化趋势。由图4(a)可知,在该位姿下,外骨骼大腿上端位移量最大,且位移量随肢体高度呈规律性递增。由图4(b)可知,在踝关节和小腿中上部的应力最大。为了得到相同载荷作用下不同位姿状态的应力和位移变化,在Pro/E中,重新调整膝关节的约束状态,改变膝关节的角度,再导入到ANSYS中重复前述步骤进行分析,将结果整合到一个示意图中,如图5所示。
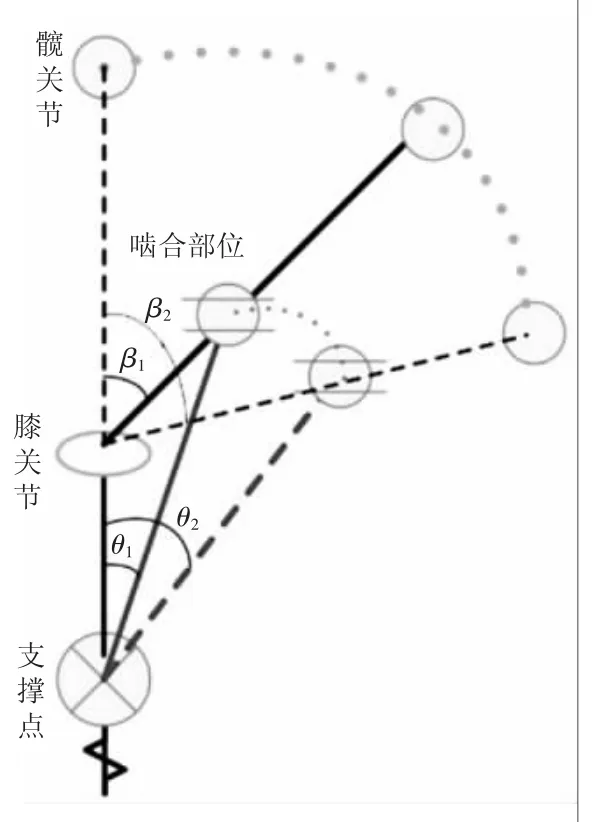
图3 齿轮定位机构的角度变换示意图

图4 外骨骼座椅模式有限元分析结果
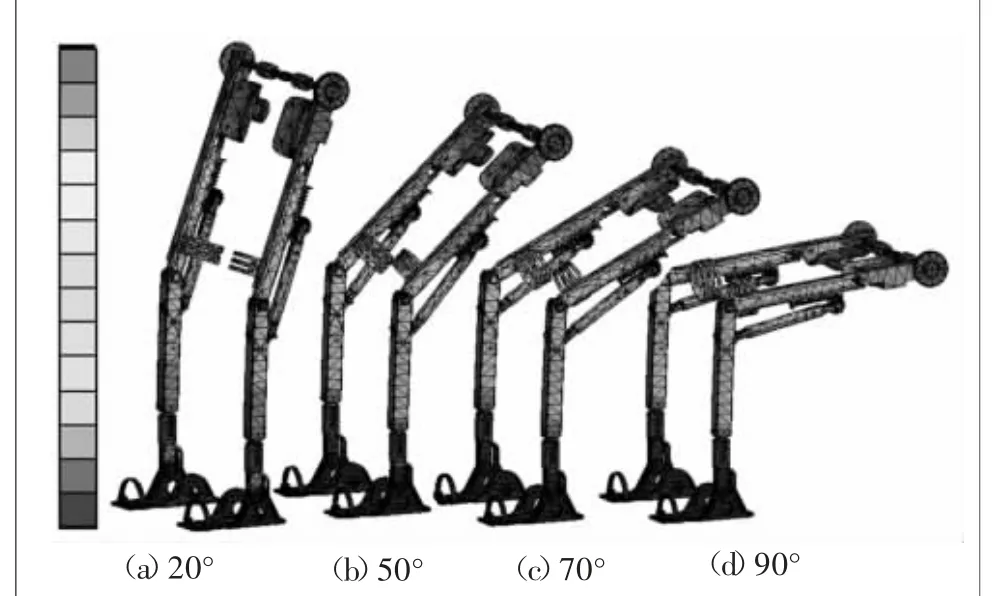
图5 不同位姿下外骨骼位移变化示意图
从图5中可看出,在相同载荷、不同位姿下,同一部位的变形量并不相等,最大变形量都在大腿上端,且随着角度的增加,最大变形量的区域呈递减趋势;最小变形量都在脚底板附近,变化规律大体一致,但是变化幅度不同。由于最小二乘法得到的数值结果,在不使用任何降噪处理的情况下,是光滑和准确的[7]。为了清晰地表达不同位姿下位移、应力的具体变化,用最小二乘法分别拟合这4种位姿下的位移、应力的最大值和平均值。由于三阶及以上多项式的和方差(SSE)接近0,拟合优度(R-square)为1[8],均能够满足拟合要求,所以采用准确性较高、阶次较低的三阶多项式函数进行拟合,其通式为

式中:pi表示多项式的拟合系数;xi表示膝关节的角度;f(x)表示位移变化量或应力变化量。
求得三阶多项式的系数及和方差(SSE)、拟合优度(R-square)如表1所示,位移变化量随膝关节角度的变化如图6所示,应力变化量随膝关节角度的变化如图7所示。
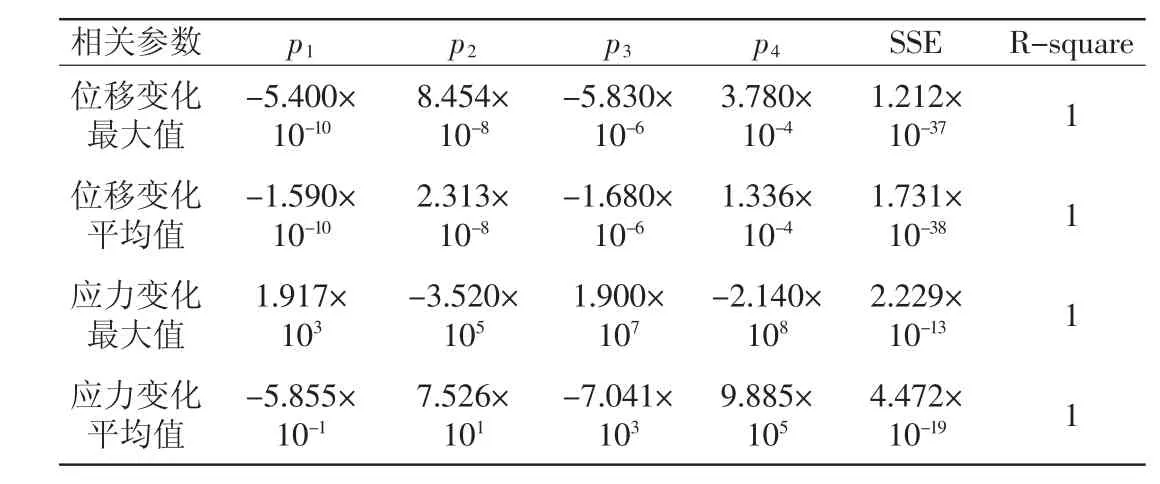
表1 座椅模式下多项式的系数及误差结果表
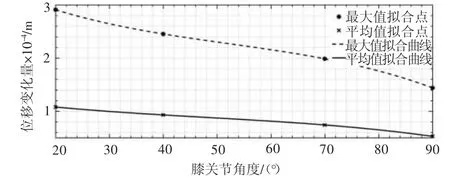
图6 位移变化量随膝关节角度变化的拟合曲线
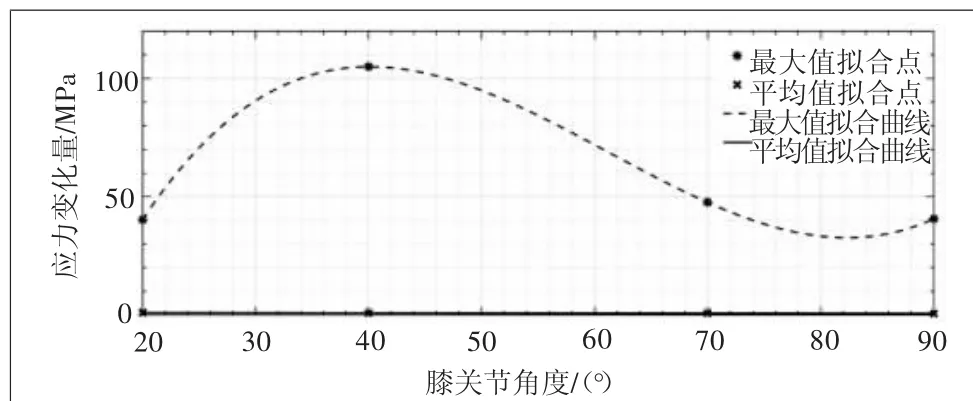
图7 应力变化量随膝关节角度变化的拟合曲线
从拟合图中可以分析得出,随着膝关节角度(与竖直方向的夹角)的增加,外骨骼的最大变形量总体在减少,呈负相关;而外骨骼的最大应力先增加再减少。由以上分析可知,在膝关节角度为40°附近,最大应力出现在小腿支架上的支撑点结构区域,为104 MPa,较为接近材料屈服强度110 MPa,所以该处应视为潜在的危险部位,需对其进行针对性强化。
2.2 上肢托举模式分析
由于上肢与下肢在结构和运动轨迹上具有一定的相似性,所以在特定的约束范围内,该装置也可实现上肢托举模式,完成托举任务[9]。在对原结构尽可能少改动的情况下,在其髋关节处追加限位结构;在膝关节和髋关节之间增加万向联轴器结构,增加托举时的肢体跟随自由度;踝关节(如图1)处连接结构解除固定件后,可从定位槽中拔出,减轻外骨骼的质量和消除脚底污垢的影响;再配合相应绑带的固定约束,使上肢更加贴合外骨骼。上肢托举模式的工作示意图如图8所示,图中θ为杆1与水平方向的夹角,β为杆2 与水平方向的夹角。
将转化为上肢托举模式的外骨骼模型导入到ANSYS中进行有限元分析,根据成年人体重在上肢部位的比例,确定作用在外骨骼上的载荷约为196 N,对其进行精度为0.01 m的网格划分,在髋关节施加全约束,在与上肢大臂接触的外骨骼部位施加均布载荷,然后重复外骨骼座椅工作模式的分析步骤,得到如图9所示的位移云图、应力云图。
从图9(a)中可见,最大变形量发生在上肢前端,离髋关节部位越远外骨骼的变形量越大。从图9(b)中可见,在万向联轴器和制动连接部位的应力最大。为了清晰地表达不同位姿下位移、应力的具体变化,在θ角分别为1°、30°、60°和90°的状态下,用最小二乘法分别拟合这4种位姿下该处位移、应力的最大值和平均值。同样采用三阶多项式进行拟合,其系数及SSE、R-square如表2所示。不同幅度下位移、应力的最大值和平均值拟合曲线如图10、图11所示。
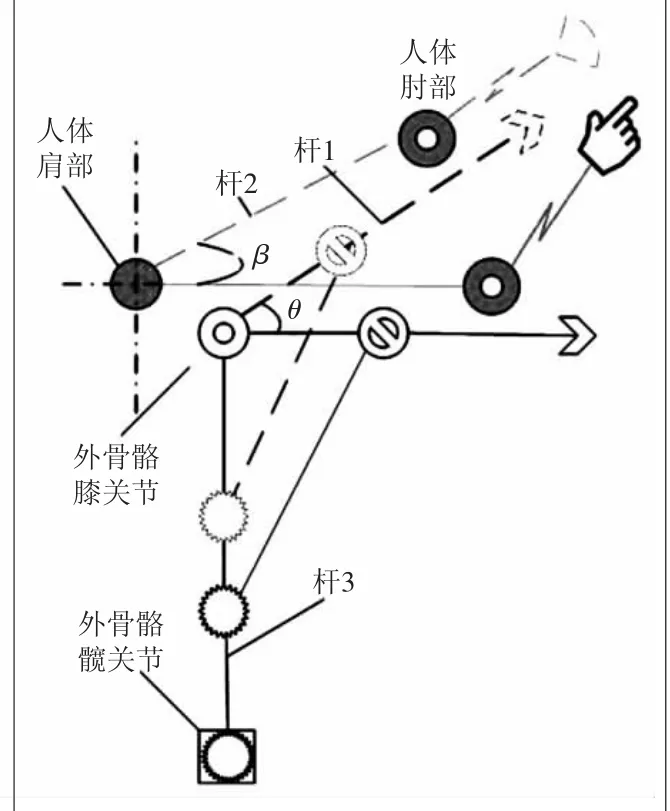
图8 上肢托举模式工作示意图
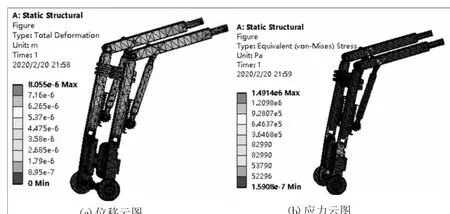
图9 外骨骼上肢托举模式有限元分析结果
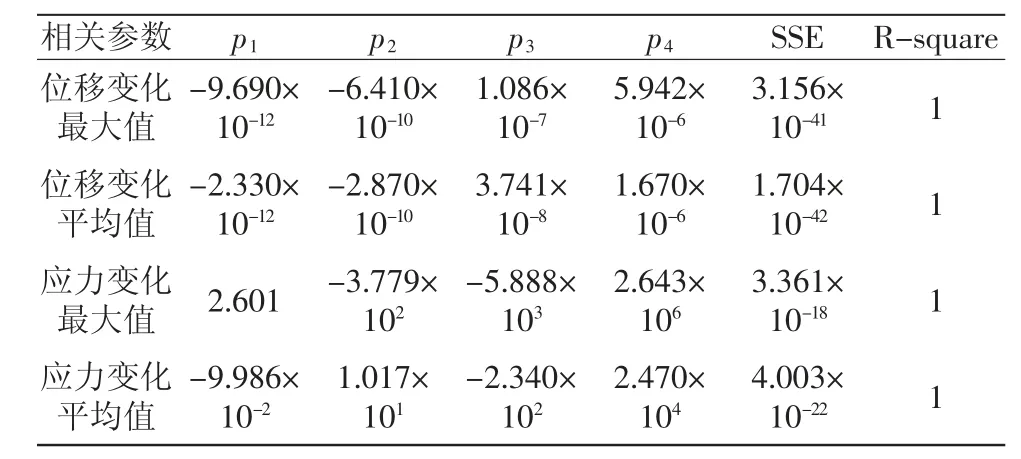
表2 托举模式下多项式的系数及误差结果表
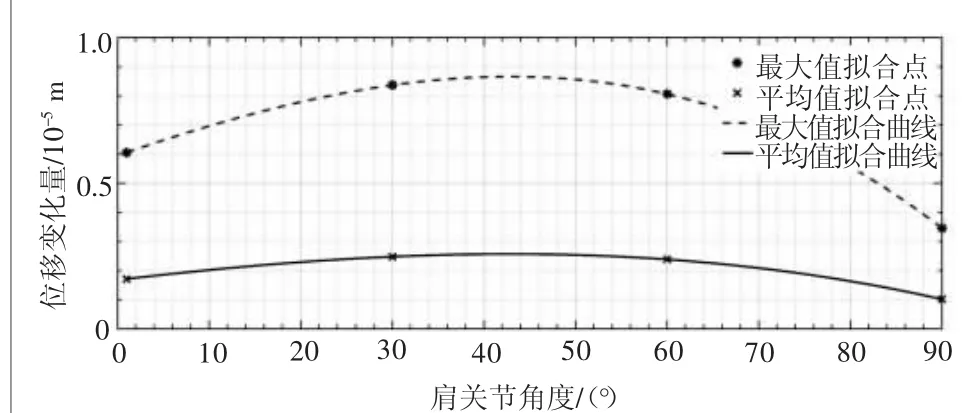
图10 位移变化量随肩关节角度变化的拟合曲线
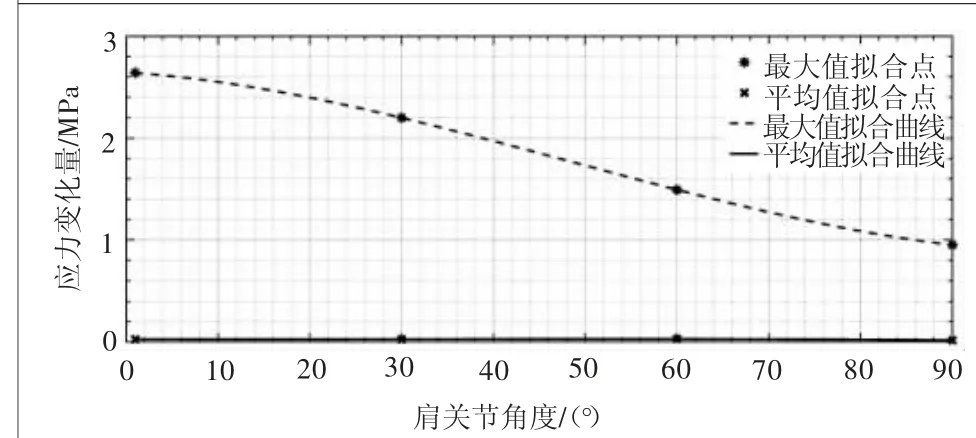
图11 应力变化量随肩关节角度变化的拟合曲线
由图10和图11可以看出,随着β角的增加,外骨骼的最大变形量总体先增加再减少,且在肩关节角度为45°附近有最大变形;而外骨骼的最大应力总体呈递减趋势,为负相关,最大应力出现在手臂接近水平状态时,此时手臂的力完全作用于支架,约为2.64 MPa,远低于材料的屈服强度。由图6~图7、图10~图11中可知,最大值与平均值相差较大,说明外骨骼整体结构的受力不均匀,力在各部件之间的传递不够均匀,可通过在应力最大处加固材料或增大接触面积等措施提高装置的承载力。
2.3 外骨骼模式的转换过程分析
从座椅模式转换到上肢托举模式的过程中,考虑到人体大腿部位与躯干部位的长度接近,下肢与上肢的长度接近,结合关节角的变化幅度,髋关节部位逆时针转动180°实现模式的转换。转换后外骨骼在卡位装置的固定下,髋关节到万向联轴器之间的部位保持竖直状态,万向联轴器可实现摆动,使外骨骼随实际托举姿势的变化而变化。限位装置安装在髋关节部位的转动轴上,将髋关节转动的角度范围限制在-90°~+180°之间,外骨骼站立时为0°。图12所示为转换过程示意图,其中角度以逆时针旋转为正、顺时针为负。
通过上述分析可知,座椅模式承受人体的总重力,而托举模式只承受上肢的重力,两种工作模式的受力大小不同,受力部位也不同。座椅模式的受力部位在装置的大腿部位,脚底板的状态为全约束,即外骨骼受到的力传递到地面;托举模式的受力部位在装置的小腿杆部位,髋关节的状态为全约束,即外骨骼的受力传递到人体腰背部。对于长时间利用上肢或下肢从事重复性操作的劳动者,这种可转换工作模式的外骨骼能够有效缓解劳动强度,改善人体受力部位,提高工作效率。
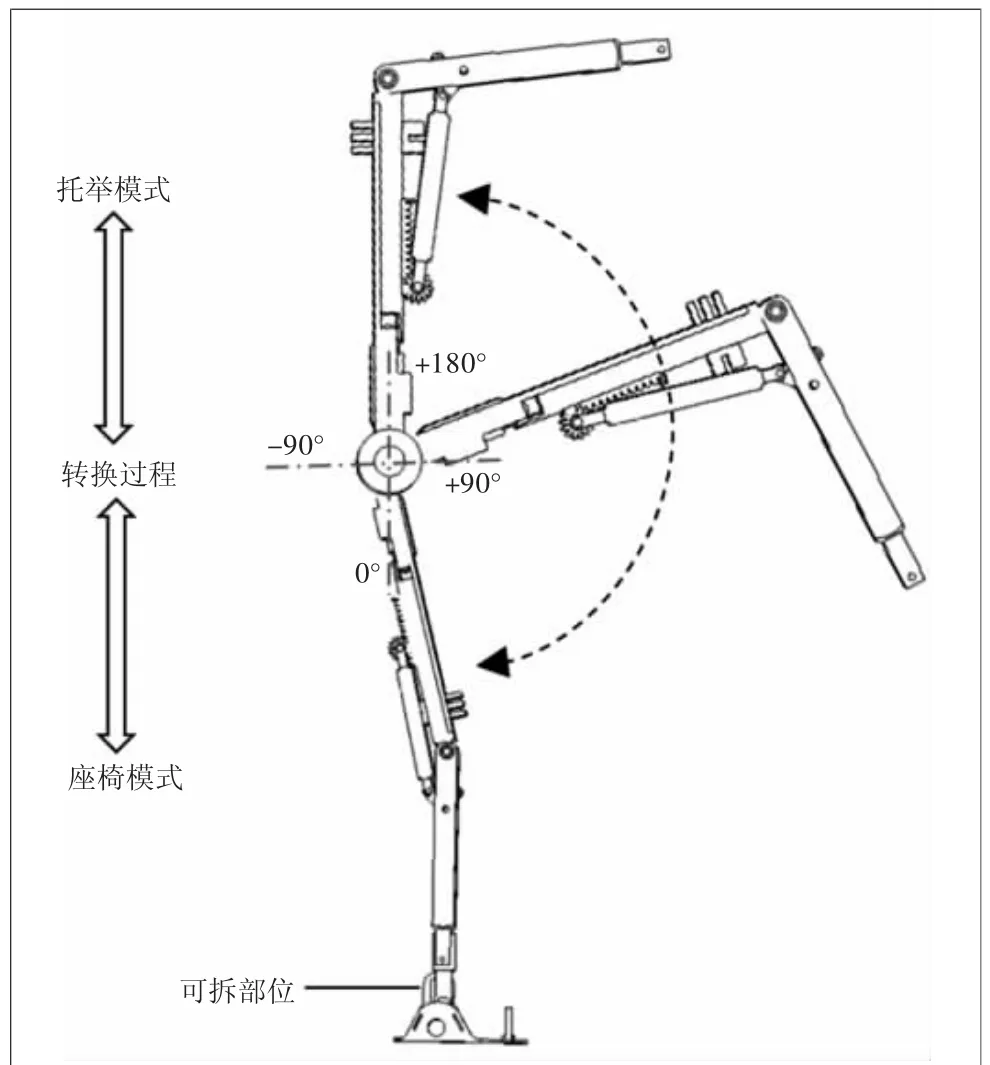
图12 模式转换过程示意图
3 外骨骼的结构优化
前述的分析设计侧重于模型的结构、尺寸和薄弱部位的确定,并未考虑外骨骼的质量,整个装置的质量有可能没有达到最优分布状态。为了便于使用者长期佩戴,故有必要进一步对装置进行拓扑优化,以降低外骨骼的质量。拓扑优化的主要思想是将寻求结构的最优拓扑问题转化为在给定的设计区域内寻求最优的材料分布问题,最终得到最佳的材料分配方案[10]。以座椅模式为例,将初步设计好的外骨骼模型,按照前述工作模式的步骤定义材料属性,施加均布载荷和约束状态,对整体进行精度为0.01m的网格划分,用Shape Optimization(Beta)工具进行拓扑优化,设定最大目标削减量为25%,得到如图13所示的外骨骼拓扑优化立体图,操作的相关参数如表3所示。

图13 外骨骼拓扑优化立体图及细节图
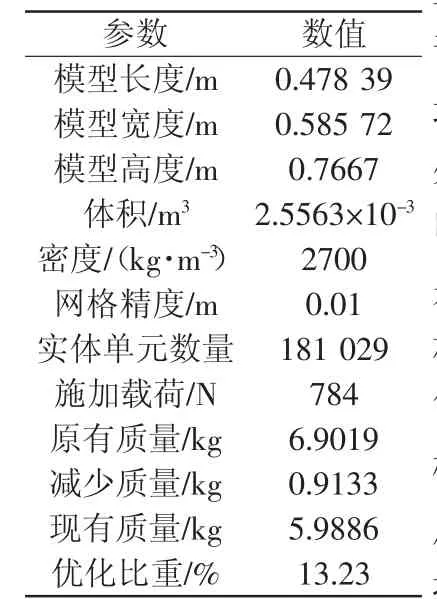
表3 外骨骼拓扑优化相关参数表
由图13和表3可知,外骨骼的整体结构变化不大,减重最大的部位为髋关节部位,与前文所述最大变形量处相对应。经过优化处理,装置质量减少了13.23%。明显得到优化的区域从上到下分别为:1)上端髋关节部位。在满足材料强度的前提下,装配接口需简化。2)大腿部位。支撑杆件需开槽处理,万向联轴器加固部位采用单边加固,在小腿支架上的支撑点结构部位增加壁厚或增加支撑轴数量等。3)支撑固定环部位。进行柔性处理,支撑板部分用弹性软垫代替,增加绑带约束。4)脚底板部位。绑带固定槽的位置降低高度。
根据外骨骼优化结果,在Pro/E中对模型进行修改,然后求出4处位姿下位移变化量与应力变化量的最大值及平均值,用最小二乘法进行拟合,将优化前后位移与应力的最大值与平均值进行对比,分别如图14、图15所示。通过图14可知,优化后位移变化量的最大值与平均值都相应小幅度变大,最大值的整体增大幅度高于平均值,与装置质量大幅度减少、位移变化量小幅度增大相对应,同时也证明了外骨骼优化的效果较明显;由图15可知,优化后的应力变化量的平均值变化幅度不明显,最大值变动幅度趋于平稳,说明外骨骼所受的应力受膝关节角度变化的影响降低,有利于外骨骼在不同位姿下安全与平稳地工作,表明外骨骼优化模型的有效性。
4 结 论
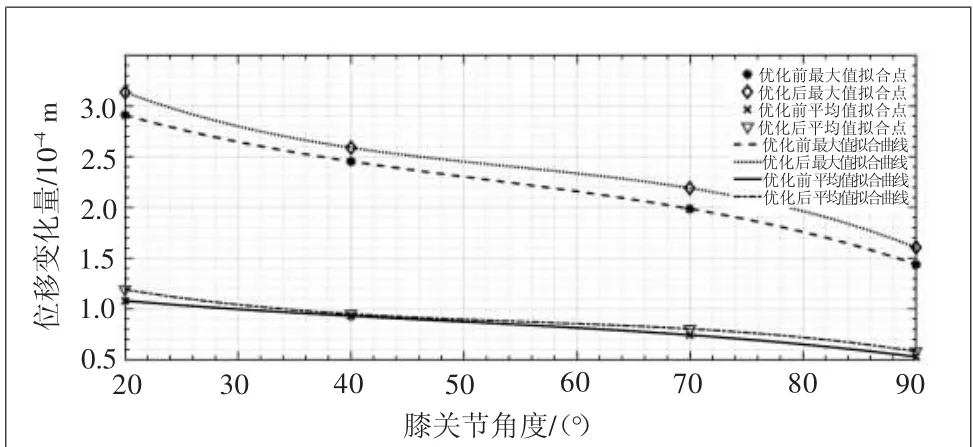
图14 位移变化量优化前后对比结果

图15 应力变化量优化前后对比结果
可穿戴式的机械外骨骼能够在很大程度上提高人体能量的利用率,包括力量、耐力等,不论是在军事领域还是民用方面都有较大的应用前景。本文采用膝关节部位提供缓冲制动的方案,建立了能够适应座椅和上肢托举两种工作模式的外骨骼模型,并利用ANSYS Workbench分析了模型结构的可行性,最后对外骨骼进行了拓扑优化,使其质量更轻,减轻人体负荷。本文研究和设计的双模式外骨骼结构,可应用于下肢助力行走和上肢助力托举,为外骨骼的多模式设计与应用提供了参考。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
小哥白尼(野生动物)(2021年12期)2021-03-29
甘肃教育(2020年18期)2020-10-28
西南交通大学学报(2018年6期)2018-12-18
中国自行车(2018年4期)2018-05-26
制造业自动化(2017年2期)2017-03-20
大众健康(2016年3期)2016-05-31
中国民族医药杂志(2016年7期)2016-05-09
太空探索(2015年9期)2015-07-12
中国康复(2015年4期)2015-04-10
